Известен вакуумный захват для транспортирования плоских изделий, включающий корпус с прикрепленной к нему сферообразной эластичной камерой, в .которой вакуум создается при ее деформировании, подпружиженный клапан для перекрывания отверстий, сообщающих полость камеры с атмосферой, и механизм фиксации положения «лапана.
Указанное устройство позволяет производить захват детали только на определенном уровне, что делает невозможным подачу деталей из стопы с изменяющимся уровнем. В устройстве не предусмотрено отпускание детали воздействием внешнего упора при горизонтальном движеь ии захвата. Помимо этого, при захвате возможна значительная деформация детали, что не позволяет использовать устройство для транспортирования тонких малопрочных пластинчатых изделий типа электродов щелочиых аккумуляторов.
Целью изобретения является повышение надежности работы при захвате и транспортировке тонких малой прочностн изделий, напри.мер электродиых пластин.
Это достигается тем, что механизм фиксации клапана выполнен в виде соединенных с корпусом зубчатого колпачка и цилиндра с выступами на торце, взаимодействующих с подпружиненной поворотной относительно оси корпуса звездочкой при возвратно-поступательном движении колпачка, а корпус имеет окна для возможности поворота при движении захвата по горизонтали.
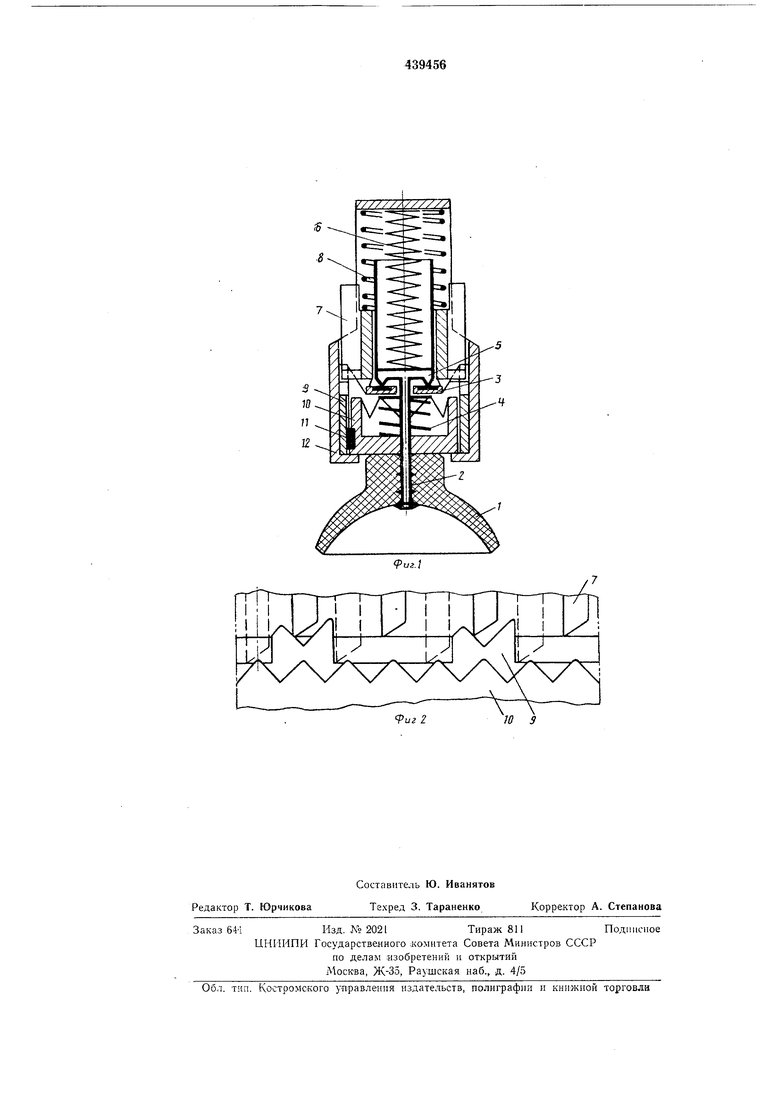
На фиг. 1 представлен вакуумиый захват, включающий сферообразную эластичную камеру /, трубку 2, клапан 3 с пружиной 4, направляющий стакан 5, образующий с торцом трубки 2 щелевые отверстия, прикрываемые клапаном 3, пружину 6, удерживающую ка.меру / в нижнем положении, звездочку 7, прижатую пружиной 8 к торцу цилиндра 9, зубчатый колпачок 10, имеющий щпонку 1J, и корпус 12. На фИГ. 2 показано взаимодействие звездочки, цилиндра и зубчатого колпачка.
Устройство работает следующим образом.
При движении корпуса 12 вниз KaiMepa /
прижимается к детали и дефор1мируется. При
этом сжшмается пружина 6, а зубья колпачка W встречают скощенные зубья звездочки 7 и поднимают последнюю, сжимая пружину 8. При подъеме выще зубцов цилиндра 9 скошенный зуб звездочки скользит по зубьям колпачка 10 и попадает во впадину, поворачивая звездочку на некоторый угол.
При движении корпуса вверх скошенный
зуб попадает во впадину зубца цилиндра 9.
При поворотном движении корпуса вниз и
вверх звездочка 7 поворачивается на некоторый угол | упирается скошенными зубьями в торец цилиндра 9.
Та1ким образом, при иовторном нажатии камерой / с деталью на стол или стопу пластин звездочка или зависает во впадине зубца цилнрадра, или опускается на его торец. В последнем случае цилиндрическая часть звездочки опирается иа клапан 3, сжшмает пружину 4 и открывает отверстия в торце стакаиа 5, сообщая с атмосферой полость камеры, Последняя отпускает пластину. При зависании звездоч1ки 7 в углублеиии зубца цилиндра клапан остается закрытым, а пластниа прочно удерживается вакуумом камеры, возникающим за счет упругих сил резины-.
Корпус 2 нвдеет с двух сторон окна, образованные лысками иа цилиНл1рической части. Через эти окиа выступают зубья звездочки 7, так что при нажатии иа зуб внешнего упора звездочка может быть повернута и выведена из впадины зубца цилиндра 9. При этом клапан 3 открывается и пластина отрывается От камеры 1.
Предлагаемая конструкция позволяет производить захват, подъем и отпускаиие пласTim «ак при повторном нажатии камеры, так и при движении манипулятора горизонтально до внешиего упора, осуществляющего отпускание пластины при иажатии на зуб звездочки. Захват может быть применен для механизации различных технологических операций, напри.мер лодачи электродных пластин щелочиых акку1муляторов из бункера, передачи пластин с операции на операцию, всортировочных или сборочиых автоматах н т. д.
Предмет изобретения
Вакуумный за.хват для транспортирования плоских изделнй, включающий корпус с прикреилеииой к не.му сферообразной эластичной ка.мерой, в которой вакуум создается ири ее деформировании, подпружиненный клапан для перекрывания отверстий, сообщающих полость камеры с атмосферой, и механизм фиксации положеиия клапана, отличающийся тем, что, с целью повышения иадежности работы при захвате и транспортировке тонких изделий малой прочности, например электродных пластин, (.механизм фиксации «лапана выполнен в виде соединенных с корпусом зубчатого колпачка и цилиндра с выступами на торце, взаимодействующих с подпружиненной поворотной относительно оси корпуса звездочкой при возвратно-поступательном движении колпач1ка, а корпус пмеет окна для возможности поворота при движении захвата по горизонтали.
fui 2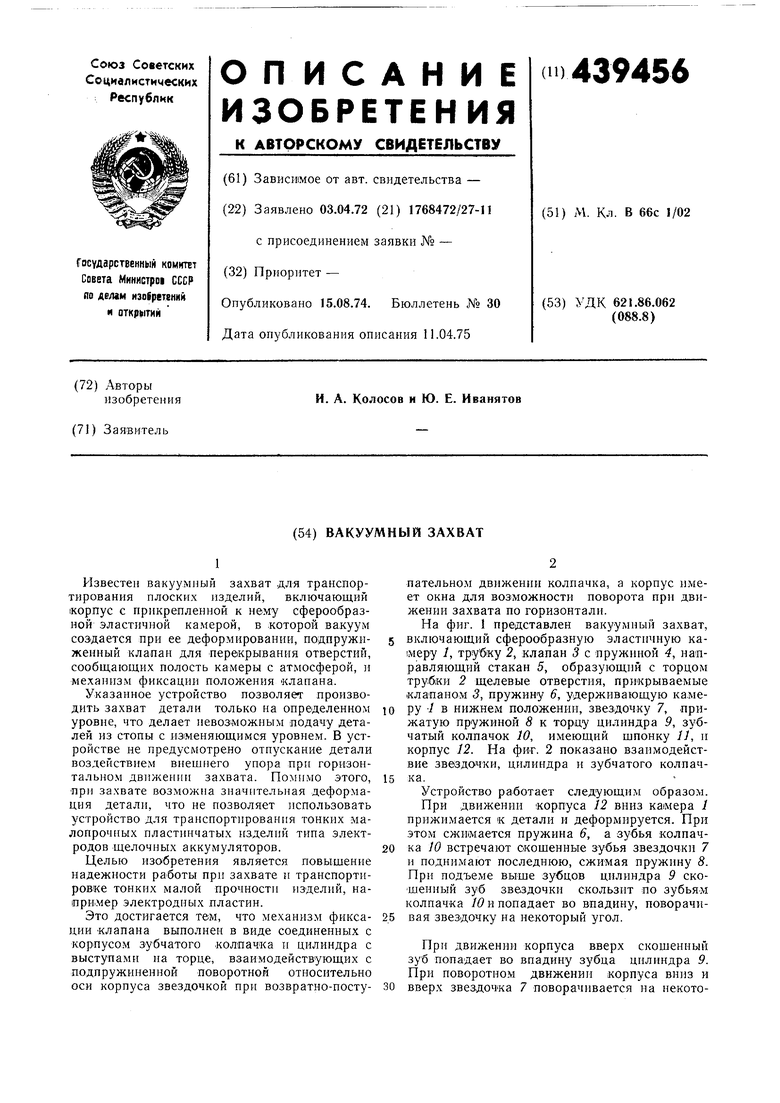
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележка складная с полуавтоматическим раскладыванием, складыванием по средством одной кнопки с складными насадками пружинный толкатель, инструментальный ключ и функцией построения тележкой конструкций типа контейнер | 2019 |
|
RU2743301C1 |
| Устройство для нанесения клея на кромки обувных деталей из мягких материалов | 1990 |
|
SU1784202A1 |
| КОЛПАЧОК ПОЛИМЕРНЫЙ С КНОПКОЙ (ВАРИАНТЫ) | 2006 |
|
RU2373123C2 |
| Устройство для растаривания емкостей | 1982 |
|
SU1115973A1 |
| Устройство для смазки шарниров роликовой цепи | 1986 |
|
SU1355568A1 |
| Автооператор | 1979 |
|
SU841908A1 |
| ИНГАЛЯТОР | 1992 |
|
RU2080129C1 |
| Устройство для выборочного печатания | 1985 |
|
SU1433839A1 |
| Устройство для ориентации деталей | 1986 |
|
SU1335404A1 |
| Тяговый волочильный барабан | 1985 |
|
SU1323149A1 |