1
Изобретение относится к креплению очистных забоев при подземной добыче угля, а именно к обеспечению прямолинейности фронта механизированной крепи.
Известные устройства такого назначения включают ограниченно гибкую базу, измерительные, передаточные и исполнительные элементы, € помощью которых осуществляется автоматическая коррекция шага, передвижки в зависимости от стрелы прогиба или угла поворота звеньев базы. Известно устройство стабилизации, выполненное с фигурными рычагами в качестве измерительных устройств и гидроклананами управления цилиндрами подачи.
Однако наличие гидроклапанов управления не позволяет широко применять устройство стабилизации в существующих типах механизированных крепей из-за его сложности, а так как передаточное отнощение фигурного рычага примято произвольным, прямое воздействие его на домкрат подачи оказывается неэффективным.
В предлагаемом устройстве фигурный рычат выполнен с оптимальным передаточным отношением, однозначно определяемым длиной и шириной жесткого звена базы, и используется в качестве регулятора прямого действия. Отсутствие клапанов управления
приводит к существенному упрощению устройства и повышает его надежность.
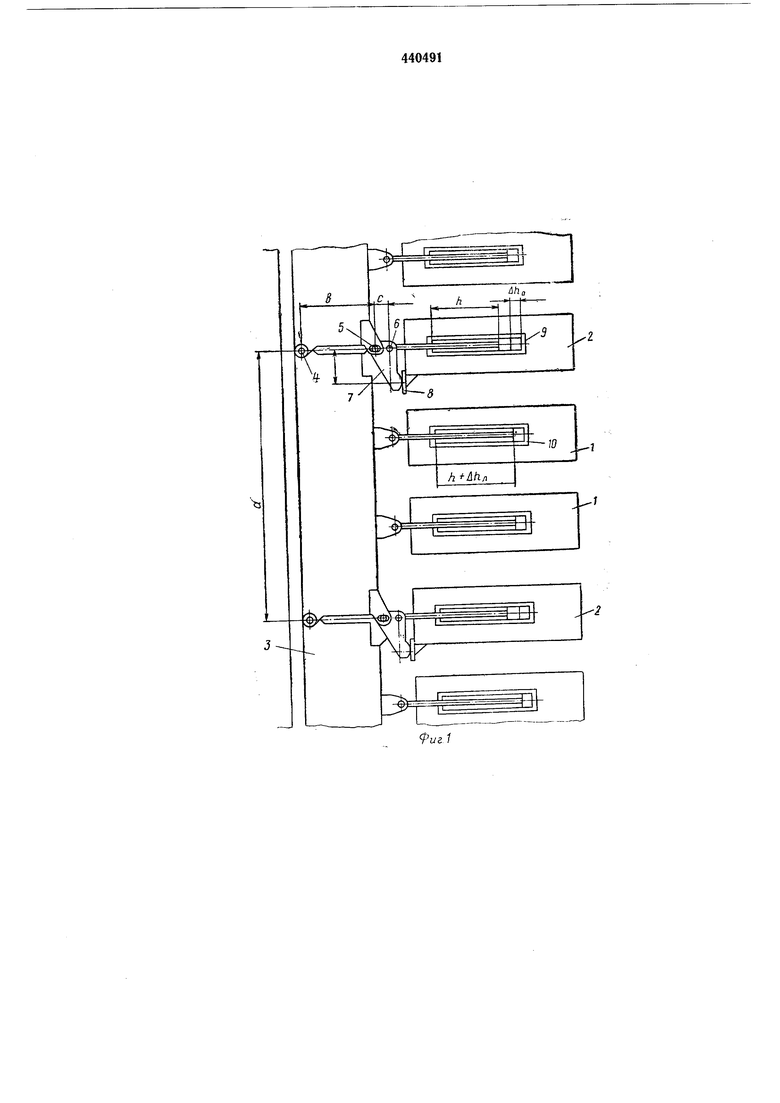
На фиг. 1 изображено устройство стабилизации; на фиг. 2 - двухзвенный участок базы; на фиг. 3-.последовательные положения первоначально искривленной линии фронта крепи.
Механизированная крепь имеет (см. фиг. 1) линейные секции 1, опорные секции 2 и две
концевые секции (на чертеже не показаны), которые отличаются одна от другой только величиной и запасом хода домкрата передвижки. Крепь оснащена ограниченно гибкой в плоскости пласта базой, выполненной в виде цепочки жестких звеньев 3, соединенных с забойной стороны шарнирами 4. Смежные звенья базы шарнирами 5 и 6 соединены с расположенным перпендикулярно фронту измерительным плечом фигурного рычага 7.
Его корректирующее нлечо, взаимодействуя с кронштейном 8, фиксирует конечное положение опорной секции крепи. В режиме автоматического управления процессом передвижки на кронштейне или .вместо него может
быть установлен концевой выключатель.
С номинальным ходом h выполнены только домкраты передвижки двух концевых секций; домкраты передвижки 9 опорных секций имеют запас хода Aho на складывание, а
домкраты передвижки 10 линейных секций - запас хода АЬл на выдвижение.
В исходном положении секции крепи отодвинуты от забоя. Вслед за выемочной машиной производится последовательная передвиж,ка секций крепи. Их конечные положения фиксируют цо-разному: линейные и концевые секции подтягивают до полного складывания домкратов, а опорные секции - до упора в корректирующее плечо фигурного рычага. Затем фронтально или волнообразно подают на забой базу, фиксируя ее .конечное положение полностью раздвинутыми домкратами опорных секций, при этом домкраты линейных секций, благодаря предусмотренному запасу хода, не препятствуют указанной ориентации базы.
Когда три шарнира смежных звеньев базы (см. фиг. 2) находится на одной прямой (пунктирная линия), то опорная секция перемещается на шаг h, равный шагу концевых секций. Если же звенья разворачиваются, как показано на чертеже, то точка А смеш,ается на величину f к забою, а точка К смеш.ается в противоположную сторону и уменьшает шаг опорной секции. Разворот звеньев в противоположном направлении приводит к такому же увеличению шага передвижки опорной секции.
Наибольшая устойчивость линии фронта по отношению к возмущениям достигается в том случае, когда перемещение фигурного рычага в боковом направлении также равно f. Это условие выполняется при передаточном отношении
d, а « 2
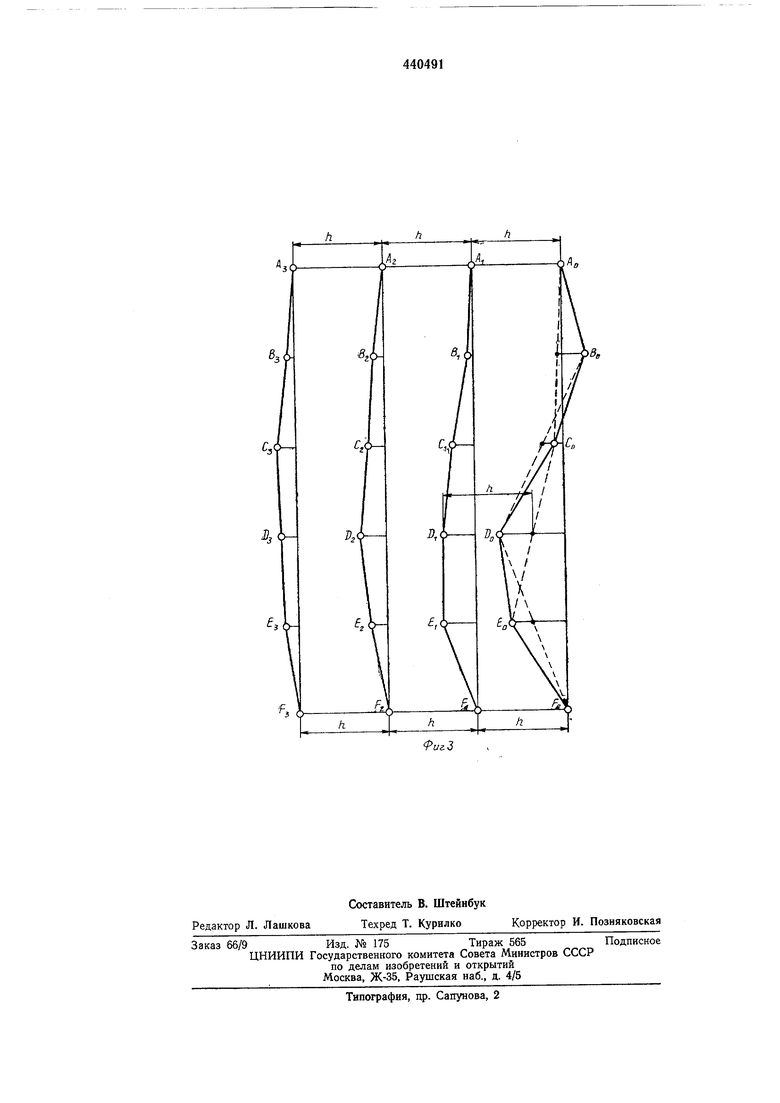
В зависимости от конструктивных особенностей крепи количество звеньев базы и геометрические параметры устройства могут быть различными, но процесс стабилизации протекает всегда одинаково. Пусть, например, база состоит из пяти звеньев и в исходном положении искривлена по линии AoBoCoDoEoFo (см. фиг. 3). При выполнении описанных операций произойдет автоматическое спрямление всех двухзвенных участков (пунктирная линия), и по завершению цикла передвижки образуется линия AiBiCiDiEiFi.
Приведенный план конечных положений свидетельствует о .самовыравнивании линии фронта.
Предмет изобретения
Устройство стабилизации линии фронта механизированной крепи, включающее ограниченно гибкую в плоскости пласта шарнирную базу и закрепленные между ее звеньями измерительные элементы в виде фигурных рычагов, отличающееся тем, что, с целью повышения надежности работы устройства, каждый фигурный рычаг выполнен с передаточным отношением
d а 2
где d - длина корректирующего плеча; с - длина измерительного плеча; а - длина жесткого звена базы; b - щирина жесткого звена базы.
гсш
1/5
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления механизированным комплексом в профильной плоскости пласта в направлении движения | 1978 |
|
SU775334A1 |
| Способ управления перемещением базы механизированной крепи | 1980 |
|
SU877059A1 |
| Механизированная крепь | 1988 |
|
SU1661440A1 |
| Механизированная крепь | 1979 |
|
SU800381A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ ОТРАБОТКИ ПЛАСТОВ КАМЕРАМИ | 1998 |
|
RU2136888C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2011 |
|
RU2487244C1 |
| Устройство для автоматического поддержания прямолинейности добычного агрегата | 1977 |
|
SU638732A1 |
| АГРЕГАТ СТРУГОДОСТАВОЧНЫЙ, СТАВ СТРУГОДОСТАВОЧНОГО АГРЕГАТА, МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ НАПРАВЛЯЮЩИХ, АГРЕГАТНАЯ КРЕПЬ, ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ, УСТРОЙСТВО ДЛЯ ПОДХВАТА ПРИЗАБОЙНОЙ КРОВЛИ, ОПОРНАЯ БАЗА КОЛЬЦЕВОГО СТРУГА | 2000 |
|
RU2182668C2 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2011 |
|
RU2514059C2 |

г
г:
uz 1
