(54) СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ БАЗЫ МЕХАНИЗИРОВАННОЙ 1ФЕПИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Устройство для управления перемещением базы механизированной крепи | 1978 |
|
SU727857A1 |
| Способ автоматического контроля и регулирования прямолинейности траектории движения горнодобывающего комплекса и устройство для его осуществления | 1985 |
|
SU1325168A1 |
| Устройство для управления перемещением базы механизированной крепи | 1985 |
|
SU1305374A2 |
| Устройство для управления перемещением базы механизированной крепи | 1979 |
|
SU877057A1 |
| Система управления передвижением базы механизированной крепи | 1980 |
|
SU909204A1 |
| Способ управления перемещением очистного комплекса | 1987 |
|
SU1456560A1 |
| Устройство для управления перемещением базовой балки очистного агрегата периодического действия | 1980 |
|
SU1117401A1 |
| Устройство для управления перемещением базы механизированной крепи | 1977 |
|
SU726347A1 |
| Способ управления перемещением базовой балки очистного агрегата циклического действия и устройство для его осуществления | 1980 |
|
SU911031A1 |
. . .: ,
Изобретение относится к горному делу, а именно к способам управления перемещением механизированных крепей, и может быть Использовано в системах управления механизированных комплексов и агрегатов.
Известен способ автоматического поддержания прямолинейности в плоскости пласта шахтных механизирован-, ных крепей очистных комплексов и агрегатов с гибкой нитью, взаимодействующей с датчиками, злектрогидроклапанами и домкратами гидросистемы подачи, заклгочагацийся в том, что сначала передвигают автономно . Закреплённую нить по заданному направлению, затем выравнивают положение базы путем взаимодействия да-Тчйков с нитью и.
Недостатком известного способа является нестабильность положения базы в плоскости пласта при ее передвижке на забой и, в связи с этим, недостаточная для практики точность поддержания толщины стружки.
Наиболее близким к предлагаемому является способ управления перемещением базы механизированной крепи, включающий перемещение шарнирно соединенных в плоскости пласта участков
базы посредством тидроцилиндров на заданную величину, за.цание и измерение величин перемещений участков базы в контрольных точках, сравнение заданных и измеряеких величин перемещений ,выработку по результатам сравнения сигналов на остановки и остановки перемещений участков базы путем подачи; сигналов на,,
10 электрогидроклапаны гидрюцилиндров 21. ,
Недостаток данного способа - недостаточная для практики стабилизация положения ЛИНИЯ базы в плоскости пластин на каждом цикле ее передвижки. Это является.следствием оши ; бок в измерительных устройствах пу ти контролируёмлх точек базы и жейия ее в условиях переменной гипсокютрии пласта. В результате накопления ошибок измерения в различных точках базы она постепенно искрывляется в плоскости пласта И на ее
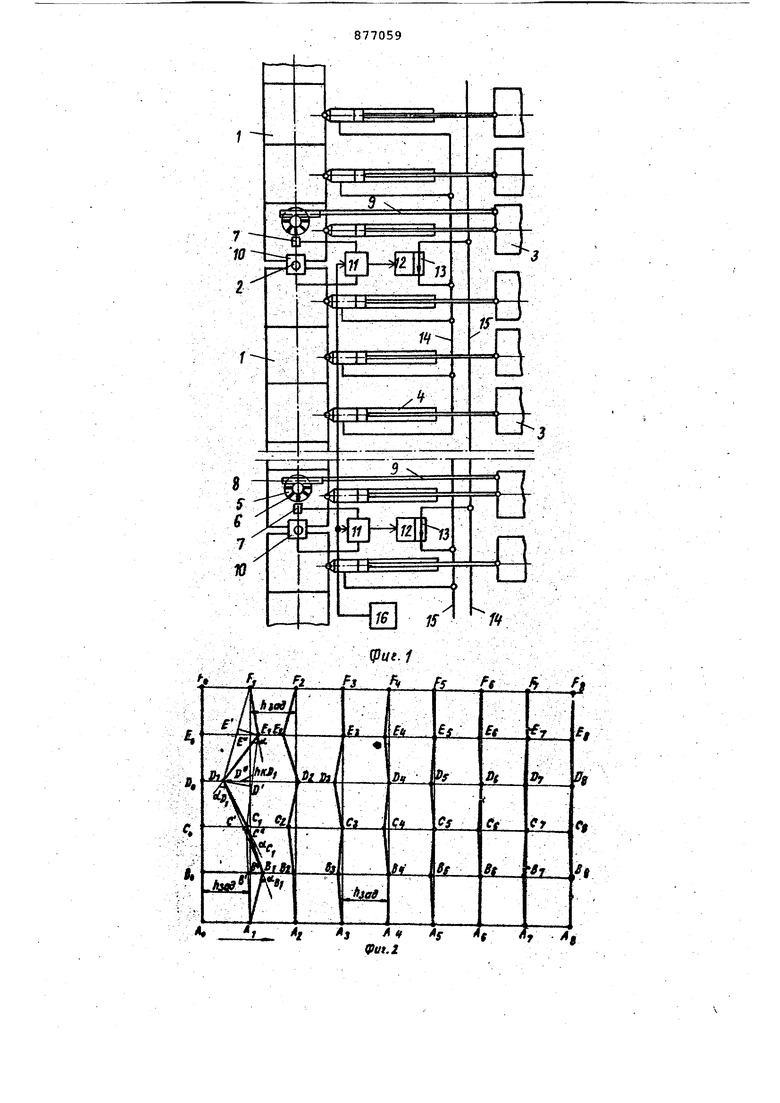
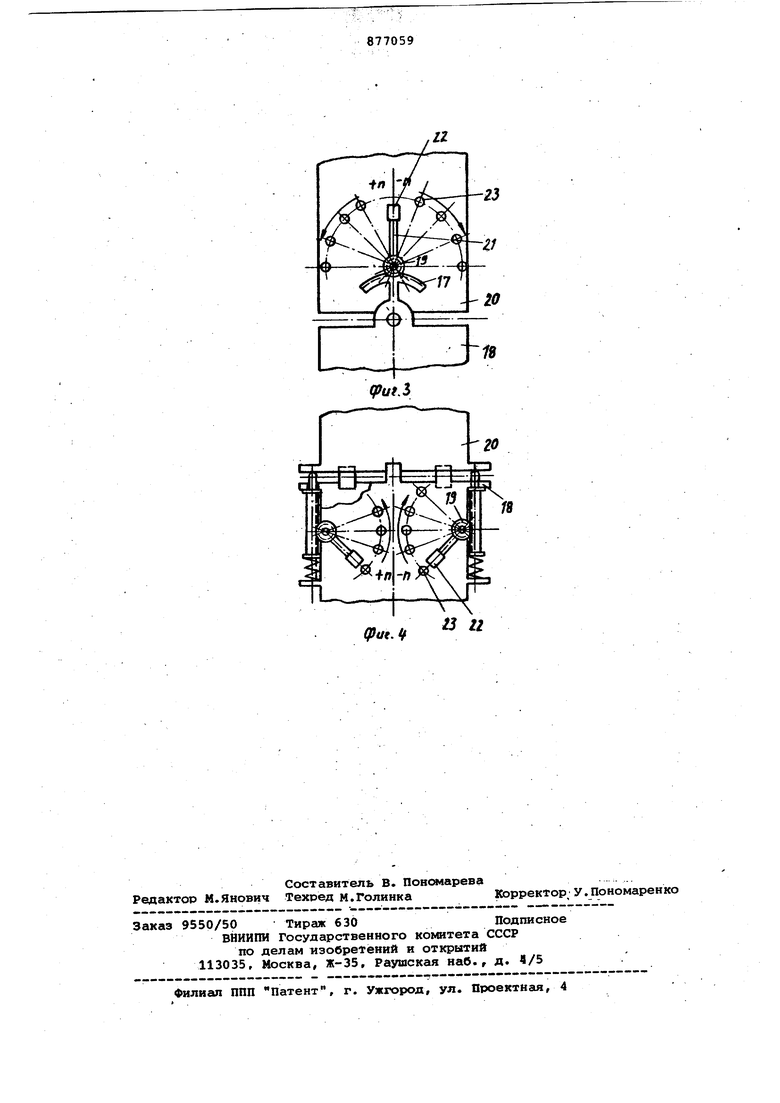
25 выравнивание э атрачивается непроизводительиое время. Кроме того, снятие выемочной машиной при выравнивании линии забоя непостоянной по толщине угольной стружки снижает производительность. Цель изобретения - повышение стабилизации положения базы на каждом цикле перемещения. . Поставленная цель достигается тем, что в контрольных точках на каждом цикле перемещения измеряют угол относительного разворота сосед них участков базы, а задаваемые величины перемещений контрольных точек базы определяют как алгебраические cyiviNiH шага передвижки и корректирующих величин, определяемых п формуле где . - значение корректирующей в личины в i-и контрольной точке на данном цикле перемещения, длина жесткого участка ба зы, м/ значение угла относительн го разворота соседних уча ков базы в i-и точке, рад На фиг.1 изображена принципиальная схема устройства для управления перемещением базы крепи/ на фиг.2 схема перемещения базы крепи; на . фиг,3 - принципиальная схема датчика угловых перемещений; на фиг.4 то же, второй вариант. Участки базы 1 выполнены из нескольких жестко соединенных в плоскости пласта секций с длиною пролет меньше критического т.е. пролета, неразрушаенюгО под действием суммарного усилия передвижки базы. Участки базы 1 соединены между с бой в плоскости пласта при помощи шарниров 2. Отдельные секции базы с секциями крепи 3 гидроци.линдрами 4. На-секциях базы, расположенных непосредственно у шарнирны соединений ее участков, в контрольные точки установлены датчики линей ных перемещений, каждый из которых выполнен, например, в виде барабана 5 с закрепленными в нем по окружно постоянными магнитами б,перемещающимися при вращении барабана относительно магнитоуправляемого контак та 7, закрепленного на секции базы Вращение барабан получает от рейки 8,связанной с секцией крепи штанго В каждой контрольной точке на ша нирных стыках участков базы установ лен Датчик 10 их взаимных угловых перемещений, электрически подключен ный к одному из входов вычислительного устройства 11, а к другому его входу подключен магнитоуправляемый контакт 7 (т.е. чувствительный элемент датчика). Выход вычислительно устройства подключен к схеме 12 управления электрогидроклапана 13, гидравлически соединенного с группо гидроцилиндров 4 передвижки базы гидромагистралями 14 и 15. Группы гидроцилиндров, подключенных к одному электрогидроклапану, размещены симметрично относительно каждой, контролируемой точки базы. Вычислительные устройства всех контрольных точек базы подключены к блоку 16 заания программы шага передвижки, базы. В Качестве датчика угловых перемещений используют любые известные в технике датчики (потенциометрические, импульсные и т.п.). Датчик состоит, например, из трансформатора (усилителя) угла, выполненного S виде шестерни 17, закрепленной на одном из участков базы 18 и шее- . терни 19, ось которой закреплена на участке базы 20. Шестерня 19 жестко соединена с консолью 21, на которой размещен постоянный магнит 22, взаимодействующий с магнитоуправляемыми контактами 23, закрепленными на секции базы 20. Благодаря трансформации угла незначительные угловые перемещения продольных осей участков базы 18 и 20 приводят к достаточным для измерения углам поворота консоли 21 с магнитом 22. В некоторых конструкциях базовых элементов агрегатов (например, с конвейером), где размещение шарнира по оси базы затруднено, более приемлемой может оказаться конструктивная схема датчика угловых перемещений, изображенная на фиг.4. Способ осуществляется следующим образом. Для пеоедвижки участков базы 1 на забой оператор с пульта упоавления по гидромагистрали 14 полает давление рабочей жидкости чепез нормально открытые гидроклапаны 13 всех КОНТРОЛЬНЫХ точек базы в поршневые полости гидроцилиндров 4., Ваза начинает перемещаться и закрепленные на ее секциях барабаны 5 с магнитами б поворачиваются относительно неподвижной рейки В со штангой 9 и магнты, взаимодействуя с датчиками 7, возбуждают в них электрические импульсы,количество которых пропорционально линейной величине передвижки базы. Импульсы поступают в вычислительное устройство 11 и, когда их количество равно количеству импульсов программы, заданной блоком 16, схема сравнения блока 11 выдает команду на закрытие гидроклапана 13. При этом давление рабочей жидкости в гидроцилиндры 4 не поступает и база 1 останавливается, выполнив заданный шаг передвижки. Датчик работает следующим образом. При образовании угла между п 5одольными осями смежных участков базы (Ьиг.2) по знаку и величине угла отнЪситеЛьного поворота участков базы магнит 22, взаимодействуя с магнитоуправляе№1ми кон- актами 23, создает в них электрические импульсы, по знаку и количеству пропорциональные углу относительного поворо та участков базы. Электрическая схе соединений углового датчика выполняется по известным принципам, обес чивающим направленный счет количест ва импульсов. Количество импульсов углового датчика поступает в вычислительное устройство 11, где производится алгебраическое преобр зование их совместно с количеством импульсов, измеренных датчиком 7 линейных перёмешений, а также сравнение с заданным по программе количеством импульсов в блоке 16. Вычислительное устройство 11 выдает команду на управление в систему электропривода 12 гидроклапана 13 гидродомкратов передвижки базыс уч том измерения линейной величины перемещения контрольной точки базы и образованной на предыдущем шаге УГЛОВОЙ величины между осями участк базы. Если все контрольные точки базы на кгикдом цикле её передвижки получают равные перемещения, то стружка угля имеет одинаковую толщину по всей длине лавы и база остается прямолинейной при любом количестве выполненных ею циклов. В результате ошибок ходов в измерительных устрой ствах пути, неодинаковых лифтов в соединениях датчиков перемещения с секциями крепи и базы, ее движения в УСЛОВИЯХ переменной гипсометрии пласта, и.т.п. база может искривляться. Данная система управления передвижением базы работает по двум параметрам : ПУТИ пройденному каждо КОНТРОЛЬНОЙ точкой, на данном цикле передвижки (например, на первом цик для точки DO это расстояние DO О-, и углу поворота межлу смежными относительно контрольной точки участков базы (например, для точки Dg на первом цикле это уголсА,-)). Система работает следующим образом. Если положение базы в начальный момент АфБ СрОоЕд Fg, а за первый цик передвижения база занимает положени F , которое не является ПРЯМОЙ линией, то устройство управления перемещением базы вырабатывае сигнал на перемещение с учетом углов между смежными участками базы. Например, для того, чтобы точка 6 вышла на линию залания на втором цикле, ей необходимо задать перемещение Н эавное HU где hj - шаг передвижки; а h| jjзначенйе корректирукхцей величины в точке D на данном шаге перемещения; В данном способе принято допущениечто из-за малости углов oLj slo i|XoL; . Учитывая это, вели,щ1ну Ьц мбжно выразить как С-„-,гдееЦ- значение Угла относительного разворота соседних участков баэы-D E и O-j C-j на данном цикле перемещения/ В.- длина участка базы. Аналогично задаваемые величины перемещений контрольных точек базы определяются как алгебраические суммл шага передвижки и соответст- i вующих корректирующих величинНц;| где Е - длина жесткого участка базы, м/ а значение угла относительно разворота соседних участков базы в i-и точке, рад. Предлагаемой способ управления перемещением базы крепи позволяет достичь улучшение стабилизации базы на каждом цикле ее передвижки благодаря чему обеспечивается поддержание постоянной толщины стружки по всей длине лавы, а также автоматическое поддержание; контроль прямолинейности базы агрегата. Фо1эмула изобретения Способ управления перемещением базы механизированной крепи, включающей перемещение шарнирно соединенных в плоскости пласта участков базы посредством гидроцилиндров на заданную величину, задание и изменение величины перемещений участков базй в контрольных точках, сравнение заданных и измеряемых величин перемещений, выработку по результатам сравнения сигналов на остановки и остановки перемещений участков базы путем подачи сигналов на электрогидроклапаны гидроцилиндров, о т л и ч а ющ и и ся тем, что, с целью повышения стабилизации положения базы на каждом иикле перемещения, в контрольных точках на каждом цикле перемещения измеряют угол относительного разворота соседних участков базы, а зaдaвae E Ie величины перемещений КОНТРОЛЬНЫХ точек определяют как алгебраические суммы шага передвижки и корректирующих величин, определяемых по hifj - значение корректирующей величины в i-и контрольной точке на данном цикле перемещения, м; длина жесткого участка базы, М; значение угла относительного разворота соседних участков базы в -и точке,рад. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 450892, кл. Е 21 D 23/00, 1974. 2.Авторское свидетельство СССР по заявке № 2721990/03, кл. Е 21 D 23/12, 1979 (прототип).
гз
(puf.
го
(Pat. If
