1
Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам для дистанционного управления рабочими механизмами, преимущественно устанавливаемых на автомобилях погрузочных гидравлических кранов.
Известное устройство содержит, по крайней мере, один основной золотник, включенный в сливную и напорную магистрали питания рабочего механизма, и вспомогательную золотниковую коробку, связанную с рукояткой управления и поочередно сообщающую торцовые полости основного золотника со сливной и напорной магистралями.
В предлагаемом устройстве вспомогательная золотниковая коробка выполнена с параллельно установленными в ее корпусе золотниками, каждый из которых имеет расточку, сообщающуюся с одной из торцовых полостей основного золотника, и подвижный в этой расточке полый щток с радиальными каналами для сообщения с напорной или сливной магистралями, причем полые щтоки связаны с соосно им размещенными подпружиненными толкателями, подвижными во взаимно противоположных направлениях при взаимодействии с коромыслом, скрепленным с рукояткой управления, и находящимся под воздействием блокировочной пружины, удерживающей его п нейтральном положении.
Такое выполнение устройства обеспечивает повышение точности управления рабочими механизмами.
Устройство может быть снабжено блокировочной пружиной, установленной между коромыслом рукоятки управления и корпусом вспомогательной золотниковой коробки, кроме того, между блокировочной пружиной и коромыслом рукоятки управления может быть установлена съемная стопорная втулка.
Устройство также молсет быть выполнено с коромыслом, укрепленным на регулируемой 5 шпильке, ввернутой в гнездо корпуса вспомогательной золотниковой коробки.
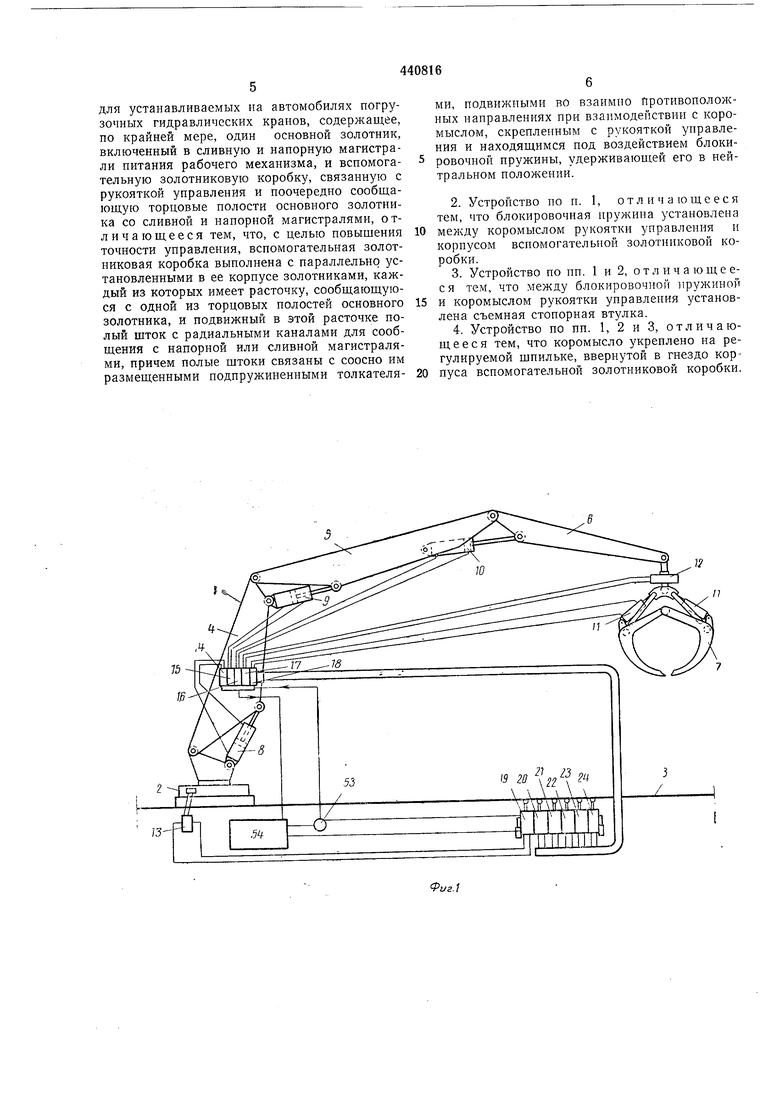
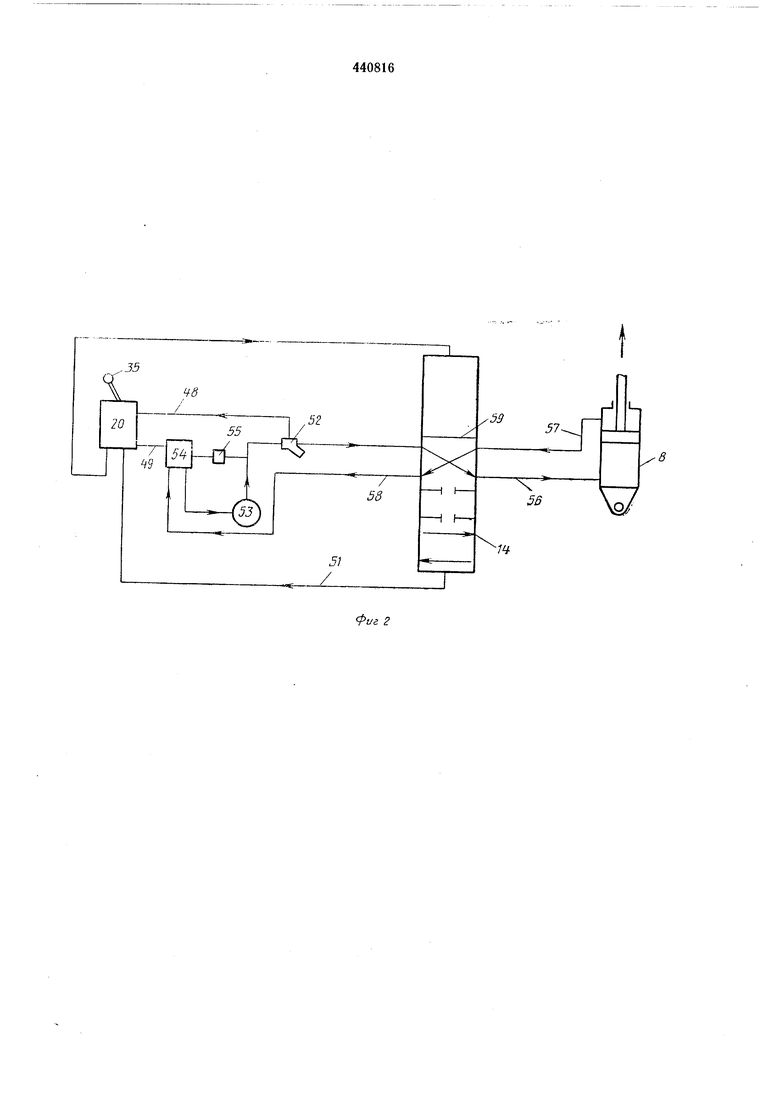
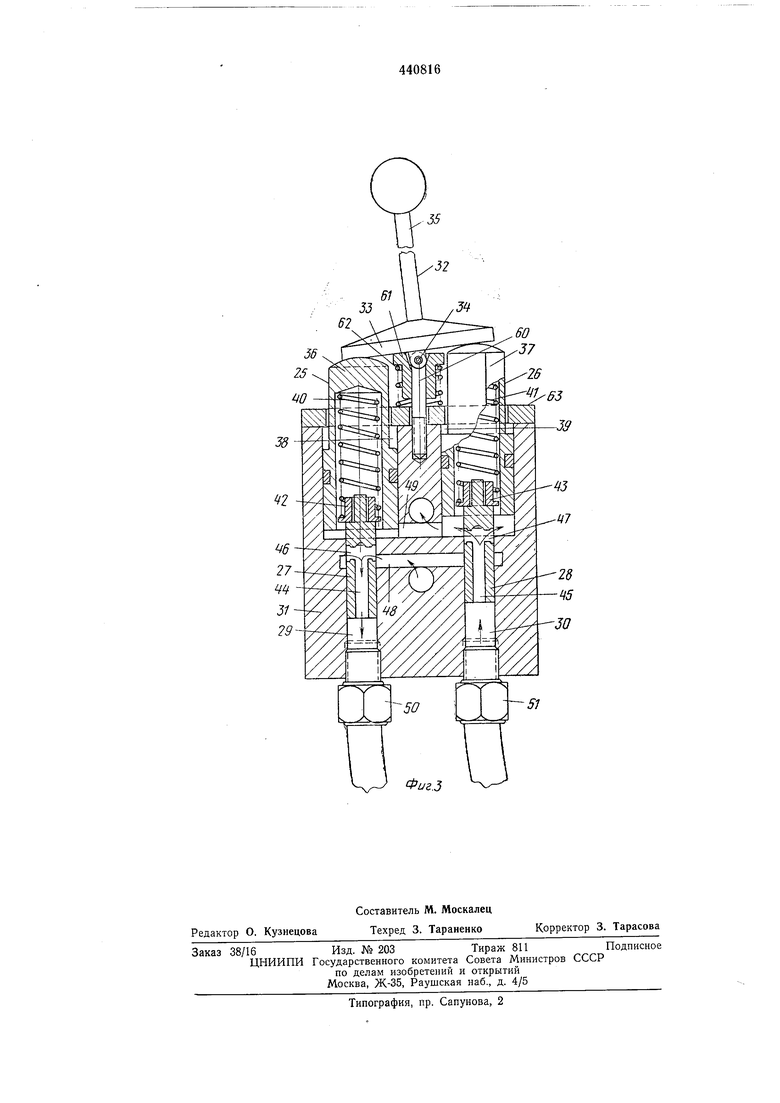
Иа фиг. 1 схематически изображен гидравлический кран с устройством для дистанционного управления рабочими механизмами; на 0 фиг. 2 - гидравлическая схема устройства, на фиг. 3 - вспомогательная золотниковая коробка, разрез.
Погрузочный кран 1 с помощью опорного новоротного устройства 2 установлен на раме 5 3 автомобиля и содержит состоящую из трех соединенных между собою шарнирно секций 4, 5 и 6 стрелу. Секция 6 снабжена грузозахватным приспособлением 7. Рабочие движения крана 1 осуществляются посредством включенных в систему гидропривода силовых цилиндров 8, 9, 10 и 11 и гидродвигателя 12. На раме 3 установлен золотник 13 для обслуживания опорного поворотного устройства 2, а для обслуживания цилиндров 8,9, Ши 11 и гидродвигателя 12 имеются золотники 14, 15, 16, 17 и 18, монтируемые на новоротной части крана 1. С одной стороны рамы 3 укреплены вспомогательные золотниковые коробки управления 19, 20, 21, 22, 23 и 24, по одной на каждый вид движения. Каждая из вспомогательных золотниковых коробок содержит два золотника 25 и 26, каждый из которых имеет штоки 27 и 28, перемещающиеся в расточках 29 и 30, выполненных в корпусе 31 коробки. Перемещения золотников 25 и 26 достигают с помощью органа управления 32, состоящего из коромысла 33, которое может качаться на оси 34, и рукоятки 35.
Под коромыслом 33 по сторонам оси 34 расположены полые поршни 36 и 37, которые неремещаются соответственно в полостях 38 и 39, выполненных в корпусе 31. В полости поршней 36 н 37 вставлены соответственно нажимпые 40 н 41, при этом нижние концы пружин упираются соответственно в седла 42 и 43 штоков 27 и 28. При перемещении рукоятки 35 перемещаются штоки 27 и 28. При этом, когда, например, шток 27 под действием полого поршня 36 идет вниз, шток 28 одновременно под давлением жидкости снизу движется вверх. Такой порядок перемещения штоков 27 и 28 достигается за счет того, что в них имеются выполненные продольно по оси сквозные каналы 44 и 45, сообщающиеся с полостями расточек 29 и 30 и радиальными каналами46 и 47, которые могут быть установлены в положение сообщения попеременно с напорной магистралью 48 и сливной магистралью 49. Каждый из золотников через магистраль 50 и 51 управления соединен с соответствующим торцом своего основного золотника. В гидросистеме устройства имеется также клапан минимального давления 52, насос 53, резервуар 54, предохранительный клапан 55 и трубопроводы 56, 57 и 58. Золотник 14 снабжен щтоком 59. Ось 34 коромысла 33 смонтирована на регулируемой шпильке 60, ввернутой в гнездо корпуса 31. На шпильку посажена стопорная втулка 61, бурт которой взаимодействует с основанием коромысла 33. В свою очередь, на втулку 61 надета блокировочная пружина 62, взаимодействующая своими торцами с крышкой 63 корпуса 31 и буртом втулки 61.
На фиг. 2 изображена гидравлическая схема устройства в положении для подъема секции 4 стрелы. Рукоятка 35 ставится в левое положение, в результате чего шток 27 подается вниз и, когда радиальный канал 46 своим нижним краем пройдет верхний край напорной магистрали 48, жидкость поступит в магистраль 50 и сместит шток 59 золотника 14 вниз. Если рукоятку 35 задержать на некоторое время в показанном положении, шток 59 займет крайнее нижнее положение.
При перемещении штока 59 жидкость выдавливается из его торцовой полости в магистраль 51, в результате чего шток 28 подается вверх. Когда радиальный канал 47 займет положение сообщения со сливной магистралью, жидкость пойдет в резервуар 54, который непосредственно сообщается с насосом 53.
Подаваемая насосом 53 жидкость поступает в клапан минимального давления 52, где создается определенное давление перед тем, как он откроется. Между нагнетательной стороной насоса и резервуаром 54 включен в линию предохранительный клапан 55, который срабатывает, когда шток золотника 14 займет, например, промежуточное положение, при котором нормальная циркуляция жидкости невозможна. Из клапана 52 жидкость иод давлением идет в золотник 14 и, пройдя канал в штоке 59, выходит через трубопровод 56 в цилиндр 8, поршень которого перемещается вверх, и секция 4 стрелы поднимается. Затем жидкость под давлением выбрасывается из цилиндра 8 в трубопровод 57, по которому она поступает в золотник 14 и через канал в штоке 59 и трубопровод 58 в резервуар 54.
Для остановки движения секции 4 стрелы необходимо, чтобы щток 59 золотника 14 занял промежуточное ноложение. Для этого нужно рукоятку 35 переставить в правое положение, в результате чего правый шток 28 переместится вниз, а левый шток 27 - вверх. Аналогично описанному жидкость ггод давлением от насоса 53 поступит в магистраль 51 и шток 59 золотника 14 переместится вверх с нижнего крайнего положения, а когда движение секции прекратится, шток 59 достигнет промежуточного положения. После этого рукоятка 35 немедленно устанавливается в нейтральное вертикальное положение.
При этом положении рукоятки штоки 27 и 28 располагаются на одном уровне, в результате чего радиальные каналы 46 и 47 сообщаются соответственно с магистралью 48. В этом случае в магистралях 50 и 5Г создается одинаковое по величине давление, в результате чего шток 59 золотника 14 блокируется.
Секцию стрелы опускают в аналогичной последовательности.
Четкого нейтрального положения устройства достигают за счет использования блокировочной пружины 62, ноджимающей съемную стопорную втулку к коромыслу 33, которое вследствие этого стремится занять нейтральное горизонтальное положение.
Изменяя по высоте установку оси 34, т. е. величину ввинчивания шпильки 60 в корпус 31, можно варьировать натяжение пружин 40 и 41 и тем самым менять величину давления жидкости в магистралях 50 и 51.
Предмет изобретения
1. Устройство для дистанционного управления рабочими механизмами, преимущественно
для устанавливаемых на автомобилях погрузочных гидравлических кранов, содержащее, по крайней мере, один основной золотник, включенный в сливную и напорную магистрали питания рабочего механизма, и вспомогательную золотниковую коробку, связанную с рукояткой управления и поочередно сообщающую торцовые полости основного золотника со сливной и напорной магистралями, отличающееся тем, что, с целью повышения точности управления, вспомогательная золотниковая коробка выполнена с параллельно установленными в ее корпусе золотниками, каждый из которых имеет расточку, сообщающуюся с одной из торцовых полостей основного золотника, и подвижный в этой расточке полый шток с радиальными каналами для сообщения с напорной или сливной магистралями, причем полые штоки связаны с соосно им размещенными подпружиненными толкателями, подвижными во взаимно Противоположных направлениях при взаимодействии с коромыслом, скрепленным с рукояткой управления и находящимся под воздействием блокировочной пружины, удерживающей его в нейтральном положении.
2.Устройство по п. 1, отличающееся тем, что блокировочная пружина установлена
между коромыслом рукоятки управления и корпусом вспомогательной золотниковой коробки.
3.Устройство по пп. 1 и 2, отличающееся тем, что между блокировочной пружиной
и коромыслом рукоятки управления установлена съемная стопорная втулка.
4.Устройство по пп. 1, 2 и 3, отличающееся тем, что коромысло укреплено на регулируемой шпильке, ввернутой в гнездо корпуса вспомогательной золотниковой коробки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320903C1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320902C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 2010 |
|
RU2443863C2 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 2007 |
|
RU2354828C2 |
| ГИДРОПНЕВМАТИЧЕСКОЕ УДАРНОЕ УСТРОЙСТВО | 2007 |
|
RU2342530C1 |
38
