Изобретение относится к области машиностроения и касается механизмов для преобразования вращательного движения в возвратно-поступательное.
Известны пространственные механизмы для преобразования вращательного движения в возвратно-поступательное, снабженные винтом с двумя резьбами - правой и левой. Винт взаимодействует с ведомым звеном своими резьбами попеременно. Однако эти механизмы могут работать только при небольших нагрузках.
Предлагаемый механизм отличается от известных тем, что с целью повышения нагрузочной способности механизма гайка выполнена в виде двух секторов с резьбами противоположного направления, установленных на пальцах, жестко соединенных между собой посредством дисков с внутренними отверстиями для пропуска вала, и установлена в корпусе на подшипниках эксцентрично относительно винта, а величина эксцентриситета гайки равна половине глубины захода резьбы.
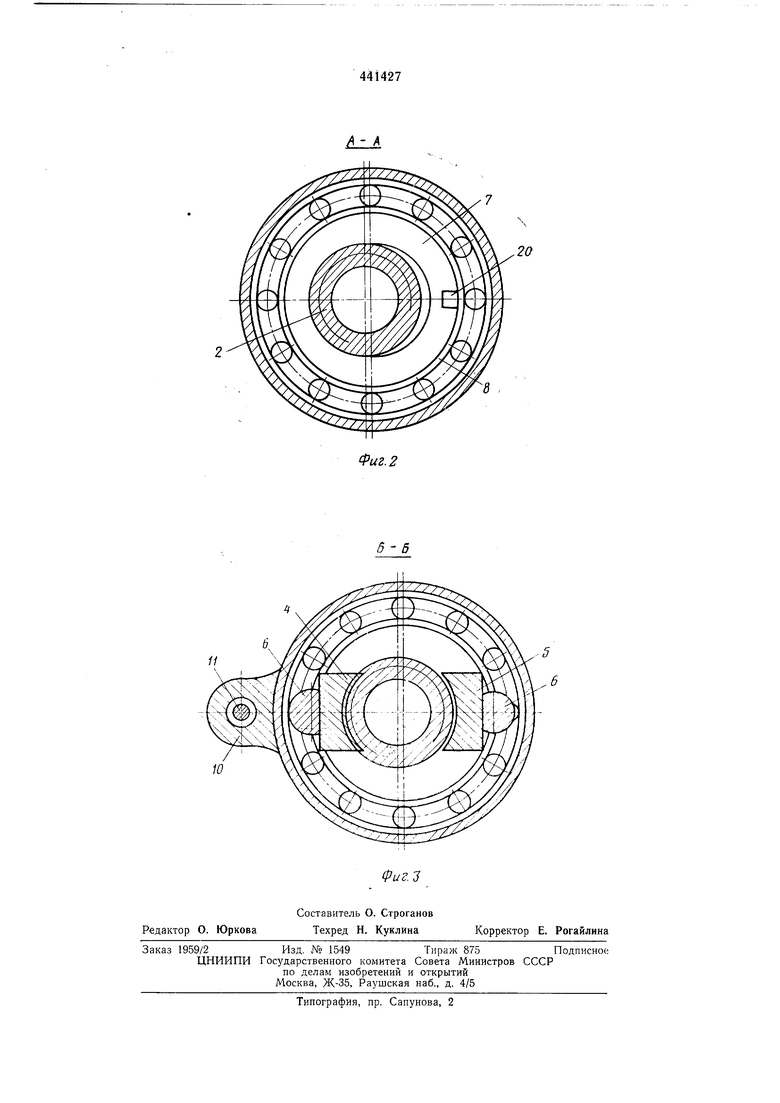
На фиг. 1 изображен предлагаемый механизм, продольный разрез; на фиг. 2- сечеиие по А-А на фиг. 1; на фиг. 3-сечение по Б - Б на фиг. 1.
Предлагаемый механизм содержит неподвижный корпус 1, пустотелый БИИТ 2 с двумя резьбами противоположного направления, две
втулки 3, центрирующие винт 2, гайку, выполненную в виде двух секторов 4, 5 с резьбами противоположного направления, установленных на пальцах 6, жестко соединенных
между собой посредством дисков 7, размещенных внутри корпуса па раздельных подшипниках 8 качения и упорных подшипниках 9. С наружной поверхностью корпуса жестко соединена втулка 10, через которую проходит стопор 11, имеющий две торцовых проточки 12, служащие для фиксации стопора с помощью фиксатора 13 в каком-либо из двух возможных положений. Стопор 11 изогнут таким образом, что один из его концов Н проходит
через другой торец корпуса и втулки 3, а другой конец 15 проходит через другой торец KOJV пуса и втулки 3 внутрь корпуса.
На стопоре 11 установлено два ролнка 16, периодически соприкасающихся с упорами 17,
фиксируемых на винте 2 зажимом 18.
На дисках 7 под углом 180° расположены выступы 19 и 20.
Винт 2 постоянно находится в зацеплении с одним из двух секторов, например сектором 4,
зафиксированным выступом 19, который упирается в конец 15 стопора II. Положение стопора 11 зафиксировано фиксатором 13. В этом положении при вращении випта 2 происходит его перемещение в направлении, соответствуюHieM направлению резьбы сектора 4.
Реверсирование поступательного движения происходит так. Один из упоров 17 подходит к ролику 16 и заставляет его вращаться, увеличивая при этом осевое давление на стопор 11. При превышении усилия, создаваемого фиксатором 13, стопор движется в паправле НИИ усилия до тех пор, пока в другую торцовую проточку 12 не попадет шарик фиксатора и не зафиксирует стопор 11 в новом положении. При этом движении конец 14 стопора 11 входит внутрь корпуса, а конец 15 выходит из корпуса, освобождая выступ 19.
Пальцы 6 с секторами 4, 5 и дисками 7 начинают вращаться совместно с винтом 2, поскольку сила трения в резьбовой паре значительно превышает силу трения в подшипниках 8, 9. При вращении процесс преобразования движения прекращается.
Это вращение происходит до тех пор, пока выступ 20 не упрется в конец 14 стопора 11.
Вращаясь, сектора 4, 5 меняются местами, т. е. сектор 4 выходит из зацепления, а сектор 5 одновременно входит в зацепление с другой резьбовой нарезкой винта 2 благодаря эксцентричному расположению относительно оси винта 2, при этом эксцентриситет должен быть равен половине глубины захода резьбы.
После этого начинается иреобразованиедвижений и цоступательное перемещение винта в другую сторону. Это продолжается до тех пор, пока другой упор 17 не передвинет стопор 11. Далее цикл повторяется.
Предмет изобретения
1.Механизм для преобразования врящятельного движения в возвратно-поступательное, содержащий неподвижпый корпус, внпт с двумя резьбами противоположного направления, гайку и устройство для реверсирования направления поступательного движения, о тличающийся тем, что, с целью повышения нагрузочной способности механизма, гайка выполнена в виде двух секторов с резьбами противоположного нанравления, установленных на пальцах, жестко соединенных между собой посредством дисков с внутренними отверстиями для пропуска вала, и установлена в корпусе па подшипниках эксцентрично относительно винта.
2.Механизм по п. 1, отличающийся тем, что величина эксцентриситета гайки равна половине глубины захода резьбы.
J.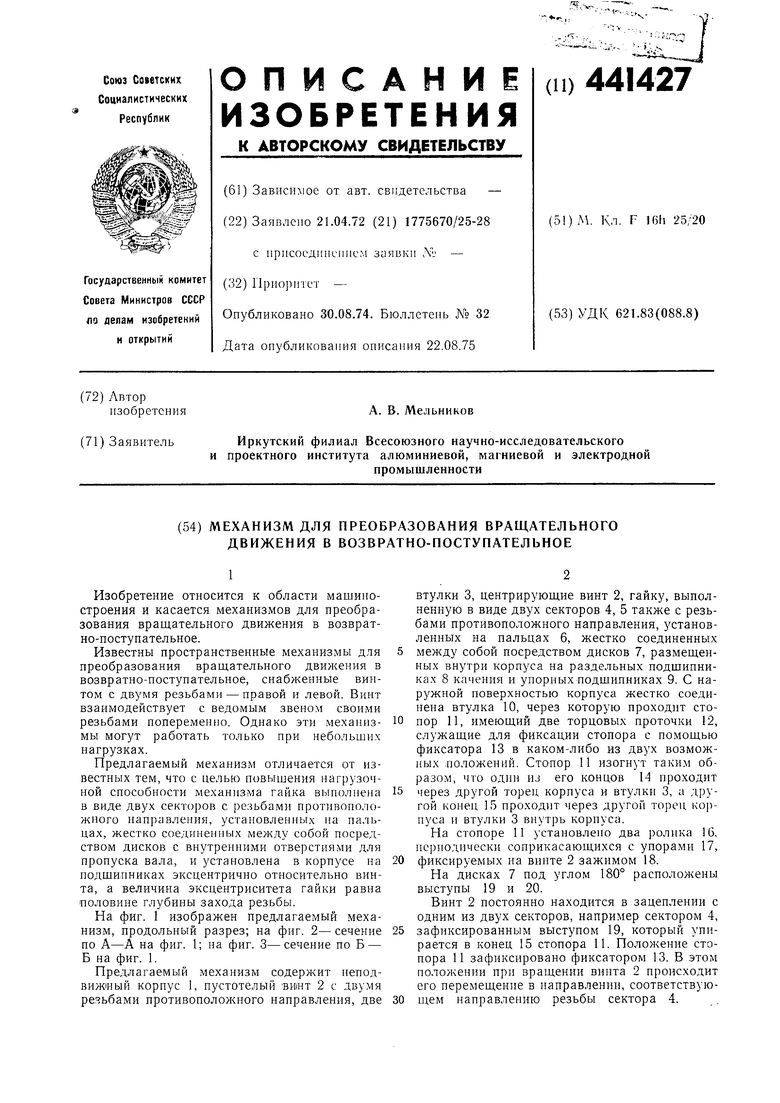
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ В ОДНОСТОРОННЕЕ ВРАЩАТЕЛЬНОЕ | 1994 |
|
RU2083895C1 |
| Механизм для преобразования вращательного движения в возвратно-поступательное | 1980 |
|
SU1010359A1 |
| ЭЛЕКТРОНАСОСНЫЙ ДОЗИРОВОЧНЫЙ АГРЕГАТ | 2003 |
|
RU2227846C1 |
| Винтовая передача В.И.Козаренко | 1986 |
|
SU1401201A1 |
| Механизм фиксации откидной опоры передвижной рамы грузового вагона | 1981 |
|
SU962066A1 |
| Многокоординатный стол | 1988 |
|
SU1748988A1 |
| Подъемник опалубки | 1980 |
|
SU883295A2 |
| Механизм для преобразования вращательного движения в возвратно-поступательное | 1985 |
|
SU1260613A1 |
| Механизм преобразования вращательного движения в возвратно-поступательное | 1986 |
|
SU1379533A1 |
| Устройство для привода в движение подающих штанг многопозиционного пресса | 1986 |
|
SU1660574A3 |