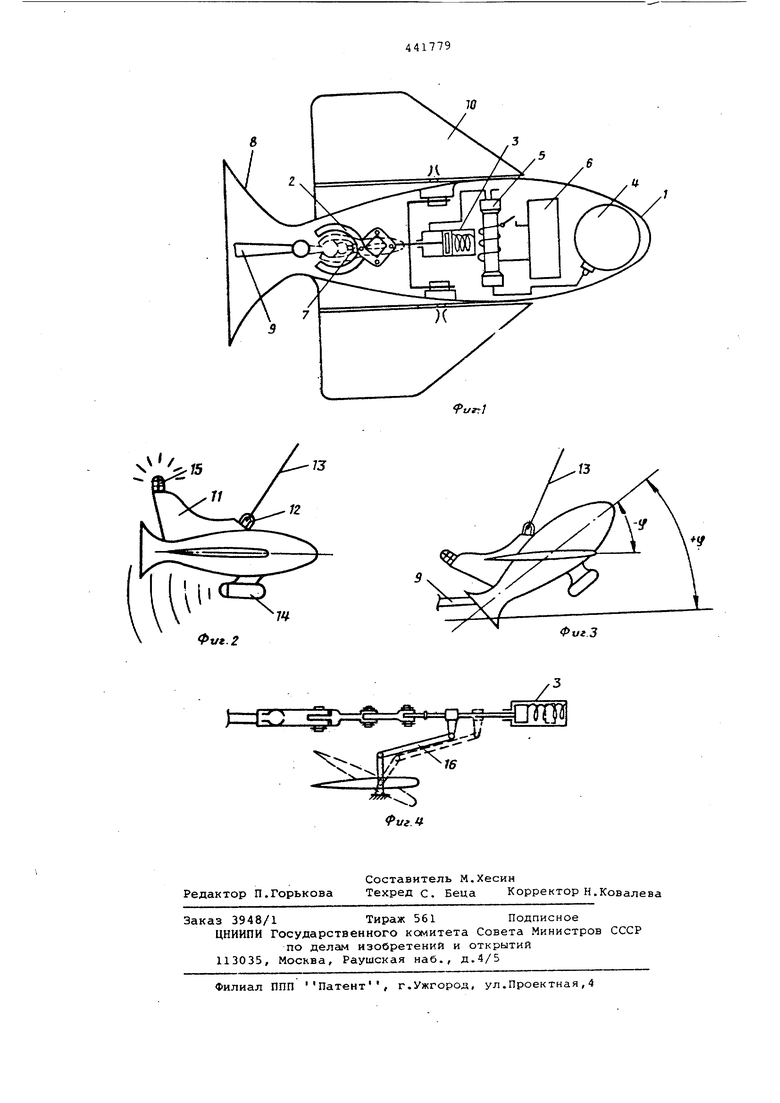
Изобрс.гение относится к судостро нию. Известны стыковочные устройства для подводных аппаратов, содержащие буксировочный трос. Цель изобретения - обеспечение многократной стыковки и расстыковки на ходу, возможности пилота руководить процессом стыковки и расстыков ки из пульта управления аппаратом, а также обеспечение стабилизации комплекса подводный аппарат - стыковочное устройство на заданной глу бине. Для этого предлагаемое стыковочное устройство выполнено в виде бyк сируемой капсулы с вмонтированными в носовую часть баллоном воздуха вы сокого давления и аккумуляторной батареей, а в кормовой части укреплены центрирующий конус и грейферный захват, кинематически соединен ный с рычагами перекладки горизонтальных рулей и пневмодвигателем, причем для визуальной и гидррлокационной наводки подводного аппарата на стыковочное устройство на нем установлены гидроакустический и проблесковый маяки, включенные в общую пневмоэлектрическую сеть стыковочного устройства. На фиг.1 изображено предлагаемое стыковочное устройство, вид сверху; на фиг.2 - то же, вид сбоку; на фиг.З то же, поЪле перекладки горизонтальных стабилизаторов;на фиг.4механизм перекладки горизонтальных стабилизаторов. В капсуле 1 смонтирован грейферный захват 2, который приводится в движение пневмодвнгателем 3, пoлyчaющи воздух в ысокого давления из баллона 4 через электропневмоклапан 5, соленоидная обмотка которого получает питание от аккумуляторной батареи 6. включающейся в сеть соленоида концевым выключателем 7. Конус 8 служит для самоцентрацин стыковочной штанги 9 подводного аппарата в грей ферном захвате 2. Горизонтальные стабилизаторы 10 служат для стабилизации устройства по глуби не, вертикальный стабилизатор 11 - для ста билизации по курсу. Рым 12 необходим для крепления буксировочного троса 13. В нижней части устройства установлен гидроакустический маяк 14, а на в,ертик альном стабилизаторе - проб8Лесковый маяк 15. Для обеспечения перекладки горизонтальных -стабилиза торов после осуществления стыковки -На..л1хоке1.пне.вмодвиг ателя 3 укреплена система рычагов 16. В динамике процесс стыковки, зах вата и расстыковки подводного аппарата со ст13ковочным устройством осу ществляется следующим образом. Пилот подводного аппарата, вклюЧи систему самонаведения аппарата на стыковочное устройство/ наблюдает за появлением сигналов-вспышек проб лесковрго маяка стыковочного устройства и на расстоянии 10-15 м выключает автопилот, при этом дальнейшее наведение и стыковку осуществ ляет вручную. . Пилот подводит подводный аппарат, к центрирующему конусу 8 устройства так, чтобы стыковочная шланга 9 вошл в него. При движении стыковочной штанги в грейферном захвате 2 она нажимает своим наконечником на концевой вьжлючатель 7, который замыкает цепь аккумуляторной батареи 6 и электропневмоклапана 5, срабатывает электропневмоклапан и воздух высокого давления перемещает поршень пневмодвигателя 3 . Шток поршня, перемещаясь, увлекает за собой звень грейферного захвата 2 и рычаги 16 перекладки горизонтальных стабилизаторов. Перекладка стабилизаторов необходима для того, чтобы при осуществлении стыковки и переходе в режим буксирования стыковочное устройство занимало положение с наклоном продольной оси относительно первоначального положения на угол + f (см.фиг.3), при этом горизонтальные стабилизаторы занимали такое же поло жение. Таким образом, комплекс подводный аппарат - стыковочное устройство получает в носовой части подъ.емную I силу, которая направляет комплекс на всплытие. Для удержания комплекса на определенной глубине и осуществления маневрирования комп лекса с помощью кормовых стабилизаторов подводного аппарата осуществ9ляется перекладка горизонтальных стабилизаторов в новое положение соответственно на угол - Ч . Для обеспечения расстыковки пило1г включает маршевый движитель, дает приращение скорости подводному аппарату. При этом стыковочная штанга 9 нажимаетконцевой выключатель 7, цепь электропневмоклапана разрываетЬ ся,.и пружина пневмодвигателя 3 воз вращает шток в первоначальное положение. При этом открывается грейферный захват 2, и пилот, сообщая подводному аппарату скорость меньшую, чем скорость судна-базы, выводит стыковочную штангу из захвата стыковочного устройства. Количество циклов стыковки и расстыковки зависит от запаса воздуха высокого давления и аккумуляторной батареи. Формула изобретения Стыковочное устройство для подводных аппаратов, содержащее буксировочный трос,отличающееся тем, что, с целью обеспечения многократной стыковки и расстыковки на ходу, ВОЗ-; можности руководства процессом стыковки и расстыковки из пульта управления аппаратом, а также обеспечения стабилизации комплекса подводный аппарат - стыковочное устройство на заданной глубине, стыковочное устройство выполнено в виде буксируемой капсулы, в носовую часть которой вмонтированы баллон воздуха высокого) давления и аккумуляторная батарея, а в кормовой части укреплены центрирующий конус и грейферный захват, кинематически соединенный с рычагами перекладки горизонтальных рулей и пневмодвигателем, причем для визуальной и гидролокационной наводки под- водного аппарата на стыковочное устройство на нем установлены гидроакустический и проблесковый маяки, включенные в общую пневмоэле-ктрическую .сеть стыковочного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
| УДАРНО-БОЕВОЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2778159C1 |
| МНОГОЭЛЕМЕНТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2769000C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2014 |
|
RU2582743C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| ПОДВОДНЫЙ ТАНКЕР | 1993 |
|
RU2062731C1 |
| СОСТАВНОЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2021 |
|
RU2770623C1 |
| Транспортировщик водолазов | 2017 |
|
RU2667113C1 |
| Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки | 2018 |
|
RU2681415C1 |
| СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ ТЕКУЧЕЙ СРЕДЫ К ПЛАВАЮЩЕМУ СУДНУ | 2013 |
|
RU2538739C1 |