Изобретение относится к области автоматики и вычислительной техники и может быть использовано в устройствах, где требуется обеспечить постоянство скорости изменения выходного сигнала независимо от степени изменения величины управляющего сигнала в динамическом рбжи|#е работы и пропорциональность величин выходного и управляющего сигналов в статическом режиме.
Известна электрическая следящая система, содержащаяэлемент сравнения и инерционный блок,через масштабный блок соединенный с входом Элемента сравнения.
Недостатком известной системы является зависимость в динамическом режиме работы скорости изменения выходного сигнала от степени величины управляющего сигнала и от времени, что не обеспечивает линейности протекания переходного процесса.
С целью устранения этого недостатка предлагаемая система содержит источник постоянного напряжения и двухполярный ключ, через который источник постоянного напряжения подключен к инерционному блоку, а управляющий вход ключа соединен с выходом элемента сравнения.
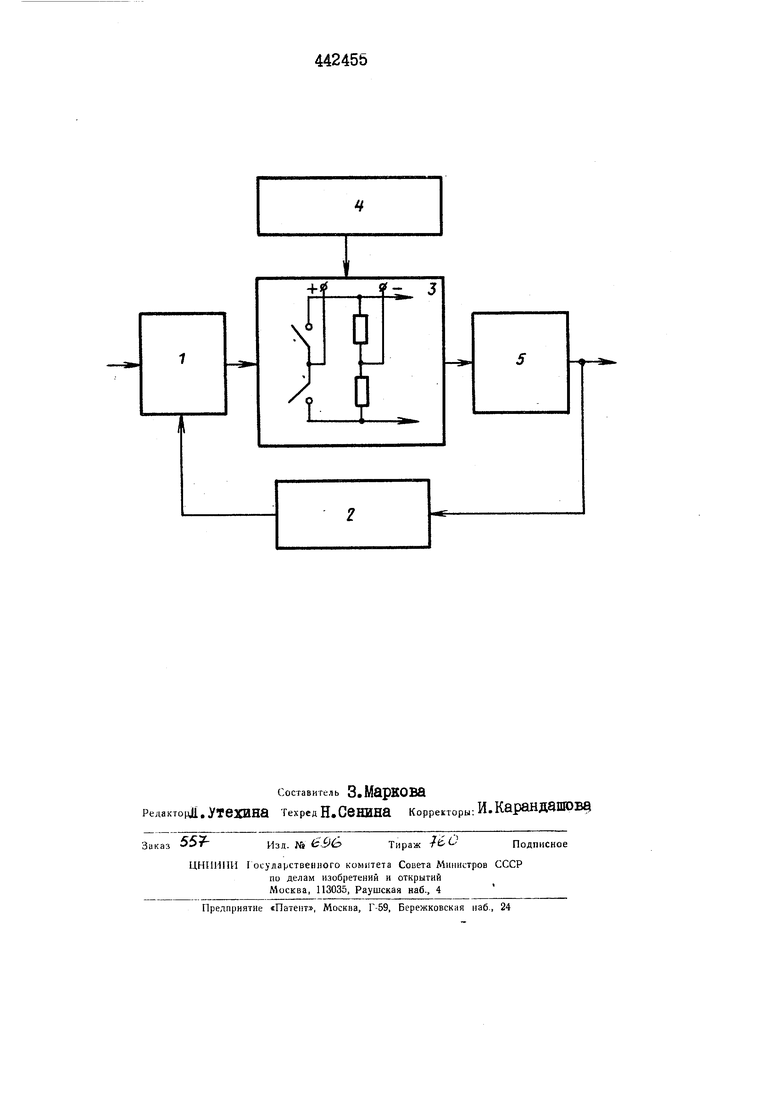
На чертеже приведена блок-схема предлагаемой электрической следящей системы.
Система содержит элемент сравнения I, один вход которого соединен с источником управляющего сигнала (на чертеже не показан), другой - с выходом масштабного блош 2, двухполярный ключ 3 один вход которого подключен к выходу элемента сравнения, другой - к источнику постоянного напряжения А-, а выход ко входу инерционного блока 5, преобразующего постоянный по величине входной сигнал, изменяющийся в динамическом режиме с определенной скоростью.
Система работает следующим образом
При поступлении управляющего сигнала за вход системы выходной сигнал элеиента сравнения I воздействует на ключ 3. Последний срабатывает и подаем на вход инерционного блока 5 постоянное напряжение источника 4 соответствующей полярностй. Выходной сигнал блока 5 начинает возрастать по линейному закону со скоростью,определяемой только величиной напряжения источника и постоянной времени блока 5, которая должна быть достаточно большой. При этом условии инерционный , блок практически соответствует интегрирующему звену в требуемом интервале времени.
Когда выходной сигнал возрастет настолько, что разность между управляющим сигналом системы и выходным сигналом блока 2 практически станет равной нулю, ключ 3 пе-реходит в состояние отсечки и выходной сигнал системы перестает изменяться. При этом его величина пропорциональна величине управляющего сигнала. Коэффициент пропорциональности определяется параметрами блока 2.
При уменьшении управляющего сигнала системы знак выходного сигнала ялемента соавнвния I изменяется на обратный. В соответствии с этим изменяется и полярность напряжения, подключаемого ключом 3
на вход инерционного блока 5.
В результате выходной сигнал уменьшается с постоянной скоростью до величины, пропорциональной новому значению управляющего сигнала.
Таким образом, в предлагаемой электрической следящей системе достигается постоянство скорости изменения выходного сигнала, независимое от степени изменения величины управляющего сигнала, а такжа от времени в динамическом режиме работы.
ПРЕдаЕТ ИЗОБРЕТЕНИЯ
Электрическая следящая система, содержащая элемент сравнения и инерцрюнный блок, через масштабный блок соединенный с входом элемента сравнения, от31ичающаяся тем, что,
целью обеспечения линейности протекания переходного процесса, система содержит источник постоянного напряжения и двухполярный ключ, через который источник постоянного
напряжения подключен к инерционному блоку, а управляющий вход ключа соединен G выходом элемента сравнения.
+
lr J

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрическая следящая система | 1984 |
|
SU1171750A2 |
| Электрическая следящая система | 1979 |
|
SU947817A2 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| Способ формирования сигнала управления | 1979 |
|
SU857931A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2107301C1 |
| Формирователь импульсов | 1979 |
|
SU815879A1 |
| Следящая система | 1984 |
|
SU1211690A1 |
| ТРЕХКОМПОНЕНТНЫЙ АКСЕЛЕРОМЕТР | 1984 |
|
RU1259815C |