Изобретение относится к адвптивным системам автоматического регулирования и управления -и может быть применено для стабилизации систем управления нелин ным неустойчивым объектом первого порядка с меняющимся во времени парс1метром.
Известны релейные регуляторы устойчивых объектов, содержащие последовательно соединенные с объектом регулирования трехпозиционный релейный элемент с зоной гистерезиса и интегрирующий сервопривод i.
Можно показать, что и для неустойчивого объекта первого порядка такой регулятор в некоторой области пространства параметров обеспечивает регулирование в автоколебательном режиме работы. Однако при изменении параметров объекта рабочая точка выходит из указанной области пространства параметров системы и последняя становится абсолютно неустойчивой.
По основному авт. св. D 442445 известна электрическая следящая система, содержащая последовательно соединенные масштабный блок, измерйт-ель рассогласования, двухполярный ключ второй вход которого соединен с выходами источника постоянного напряжения, и инерционный блок 2.
Недостатком известной системы является малая область устойчивости.
Цель изобретения - расширение области устойчивости системы.
Поставленная цель достигается тем, что в системе входы источника постоянного напряжения соединены с соот10ветствующими выходсми инерционного блока.
Кроме того, источник постоянного напряжения содержит первый и второй дифференцирующие блоки, входы кото 5рых через последовательно соединенные первый сумматор, пороговый элемент, формирователь импульсов и первый ключ соединены с входом блока памяти, а выходы через последователь20но соединенные второй сумматор и блок деления соединены с вторым входом первого ключа, первый вход второго ключа соединен с выходом первого сумматора, второй вход - с выходом
25 формирователя импульсов, третий вход с выходом формирователя опорного сигнала, выход - с вторые входом блока деления, а выход блока пемятя подключен к выходу источника постоян
30 ного напряжения.
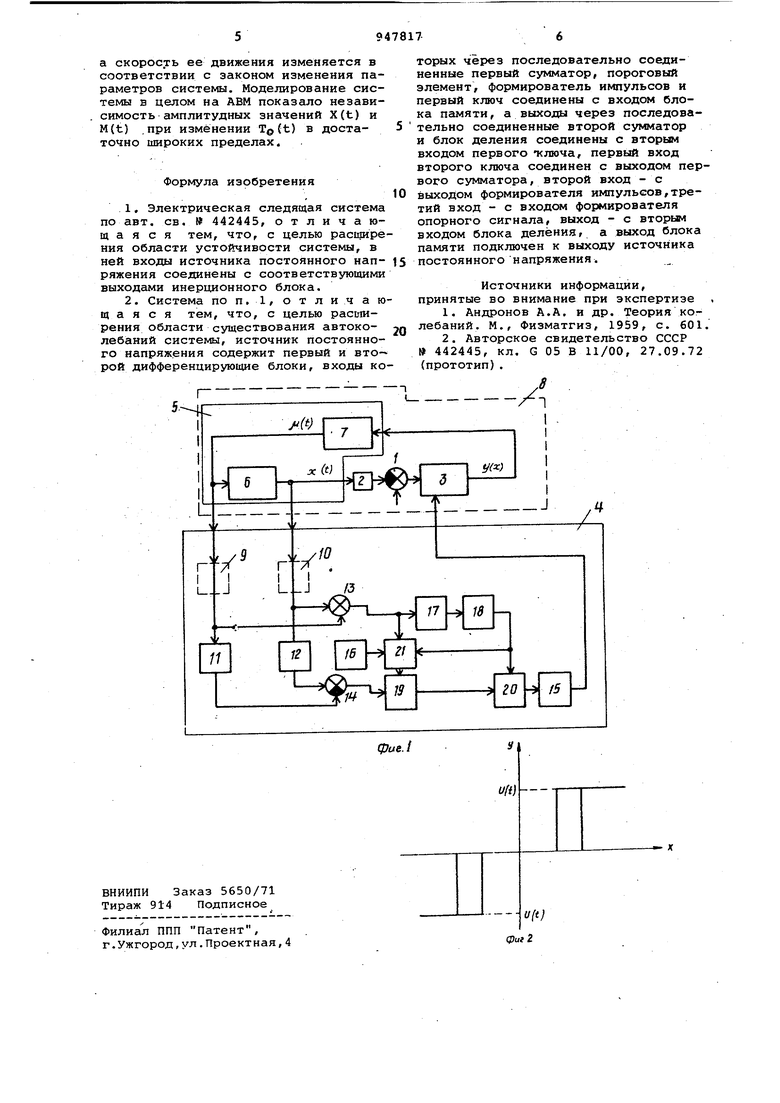
На фиг. .1 изображена блок-схема . регулятора), на фиг. 2 - характеристика двухполярного ключа.
Блок-схема включает элемент 1 сравнения, масштабный блок 2, двухполярный ключ 3, источник 4 постоянного напряжения, инерционный блок 5, объект 6 ре1 улйрЬвания, сервопривод 7, основной контур 9 регулирования, первый и второй датчики-преобразователи 9 и 10, первый и второй дифференцирующие блоки 11 и 12, первый и второй сумматоры 13 и 14, блок 15 . памяти, формирователь 16 опорного сигнала, пороговый блок 17, формирователь 18 импульсрв, блок 19 деления, первый и второй ключи 20 и 21 кроме того, X(t) - выходная кордината объекта регулирования, /Jit) выходная координата сервопривода,У{X)сигнал управления.
Объект 6 регулирования и интегрирующий сервопривод 7 описываются, соответственно, дифференциальными уравнениями вида
To(t)k т X o(.To(t)/( + (1)
ТЧ/J Y(X), где To(t) - меняющаяся постоянная
времени объекта 6 регулирования; - постоянная времени сервопривода 7; To(t) fb (t)T .
Источник 4 постоянного напряжения синтезирован в соответствии с выражением для величины, обратно пропорциональной постоянной времени объекта регулирования и работает следующим образом.
Выходные координаты(1) и X(t) сервопривода 7 и объекта регулирования измеряются и преобразуются датчиками-преобразователями 9 и 10, в пропорциональные им напряжения M(t) и X(t) и подаются на. входы сумматора 13 и дифференцирующих блоков 11 и 12. Результат дифференцирования с выхода дифференцирующего блока 11 подается на один из входов сумматора 14. Другой вход сумматора подключен, к выходу дифференцирующего блока 12, Таким образом на выходе сумматора 13 получается напряжение, равное X(t)+M(t),,a на выходе сумматора 14 X(t) -oLM(t) . Блок 19 деления обеспечивает деление выходного напряжения сумматора 14 на выходное нап ряжение суматора 13.Так как постоянная времени объекта б регулирования изменяется достаточно медленно по сравнению с периодом автоколебаний,- то с целью исключения деления на напряжения, близкие к нулю, и, следовательно, повышения точности операции деления в систему введен пороговый блок 17, вход которого соединен с выходов сумматора 1 При переходе суммы X(t) + М (t) через пороговый уровень U, пороговый блок 17 срабатывает и запускает формирователь 18 импульсов, например, ждущий мультивибратор, обеспечивающий оддачу напряжения X(t) + M(t) через ключ 21 на блок 19 деления и передачу результата деления через ключ 20 в блок 15 памяти.Напряжение с выхода блока 15 памяти дается на вход .двухполярного ключа 3, управляющего сервоприводом 7. Двухплярный ключ 3 может быть реализован любым известным способом (т.е. выполнен в виде электромеханического, электронного и т.д. реле). В двухполярном ключе 3 выходное напряжение источника 4 постоянного напряжения при необходимости инвертируется После окончания импульса на выходе формирователя 18 импульсов вход блока 19 деления отключается от выхода сумматора 13 и подключается к формирователю 16 опорного сигнала. Перед пуском системы в блок 15 памяти вводится напряжение, величина которого обеспечивает существование в системе устойчивого предельного цикла. Значение выходной координаты У(Х) U(t) двухполярного кгаоча 3 (без учета погрешностей источника 4 постоянного напряжения) определяется в этом случае дифференциальным уравнением вида % iS g 4Kt-t,bm-t,-e;3. (2)
где Х{) + М(Ы Uo/
4
Т Т «епри t,- + 6
: .Т Та-л «при t. + 1 UQ - пороговый уровень срабатывания порогового блока 17; 9 - длительность импульса формирователя 18 импульсов г Т постоянные времени блока 15
памяти и ключа 20. Если постоянная времени объекта регулирования изменяется достаточно медленно, можно приближенно считать, что
U(t)
(3) Тогда заменой
аг 1(4)
dfc (4(tT
система (1) приводится к автономной системе с нелинейным временем.
-С f -i-, dt,
о p.(t)
в которой амплитудные отношения регулируемой координаты не зависят от переменных параметров объекта регулирования. Изображающая точка при этом движется по фазовой траектории одного и того же предельного цикла, а скорость ее движения изменяется в соответствии с законом изменения параметров системы. Моделирование системы в целом на АВМ показало независимость амплитудных значений X(t) и M(t) при изменении To{t) в достаточно широких пределах. Формула изобретения 1.Электрическая следящая система по авт. св. № 442445, отличающаяся тем, что, с целью расшире ния области устойчивости системы, в ней входы источника постоянного напряжения соединены с соответствующими выходами инерционного блока. 2.Система по п, 1, отличаю щаяся тем, что, с целью расширения области существования автоколебаний системы, источник постоянного напряжения содержит первый и второй дифференцирующие блоки, входы которых через последовательно соединенные первый сумматор, пороговый элемент, формирователь импульсов и первый ключ соединены с входом блока памяти, а выходы через последовательно соединенные второй сумматор и блок деления соединены с вторым входом первого -ключа, первый вход второго ключа соединен с выходом первого сумматора, второй вход - с выходом формирователя импульсов,третий вход - с входом формирователя опорного сигнала, выход - с вторым входом блока деления, а выход блока памяти подключен к выходу источника постоянногонапряжения. Источники информации, принятые во внимание при зкспертизе , 1.Андронов А.А. и др. Теория колебаний. М., Физматгиэ, 1959, с. 601. 2.Авторское свидетельство СССР 442445, кл. G 05 В 11/00, 27.09.72 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения магнитного поля | 1986 |
|
SU1352425A1 |
| Управляемый электропривод | 1983 |
|
SU1144201A1 |
| Устройство для сжатия информации | 1981 |
|
SU970421A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1988 |
|
SU1647901A1 |
| Запоминающее устройство | 1980 |
|
SU879648A1 |
| Задающее устройство для цифрового следящего привода | 1986 |
|
SU1411709A1 |
| Устройство для моделирования запаздывания сигнала | 1990 |
|
SU1783550A1 |
| Задающее устройство для цифрового следящего привода | 1983 |
|
SU1144088A1 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| Преобразователь двоичного кода в двоично-десятичный код угловых единиц | 1983 |
|
SU1124282A1 |
