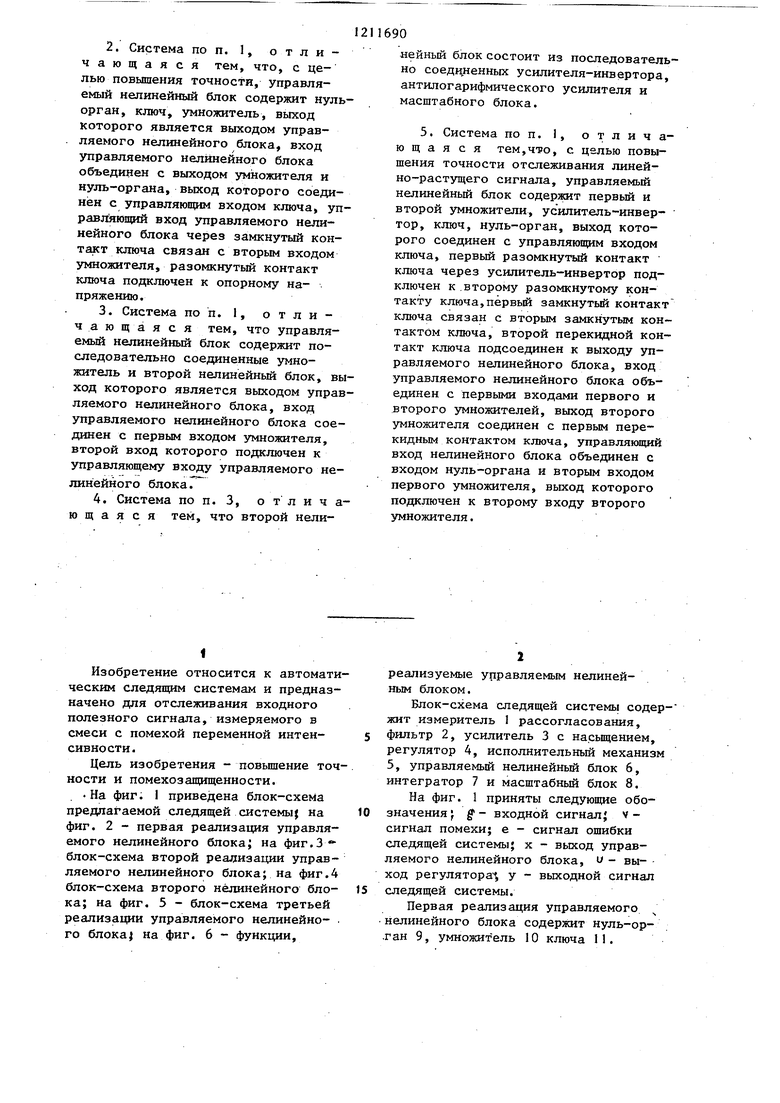
2. Система по п. 1, отличающаяся тем, что, с це- лью повьшения точности, управляемый нелинейный блок содержит нуль орган, ключ, умножитель, выход которого является выходом управляемого нелинейного блока, вход управляемого нелинейного блока объединен с выходом умножителя и нуль-органа, выход которого соединён с управляющим входом ключа, управляющий вход управляемого нелинейного блока через замкнутый контакт ключа связан с вторым входом умножителя, разомкнутый контакт ключа подключен к опорному на- пряжению.
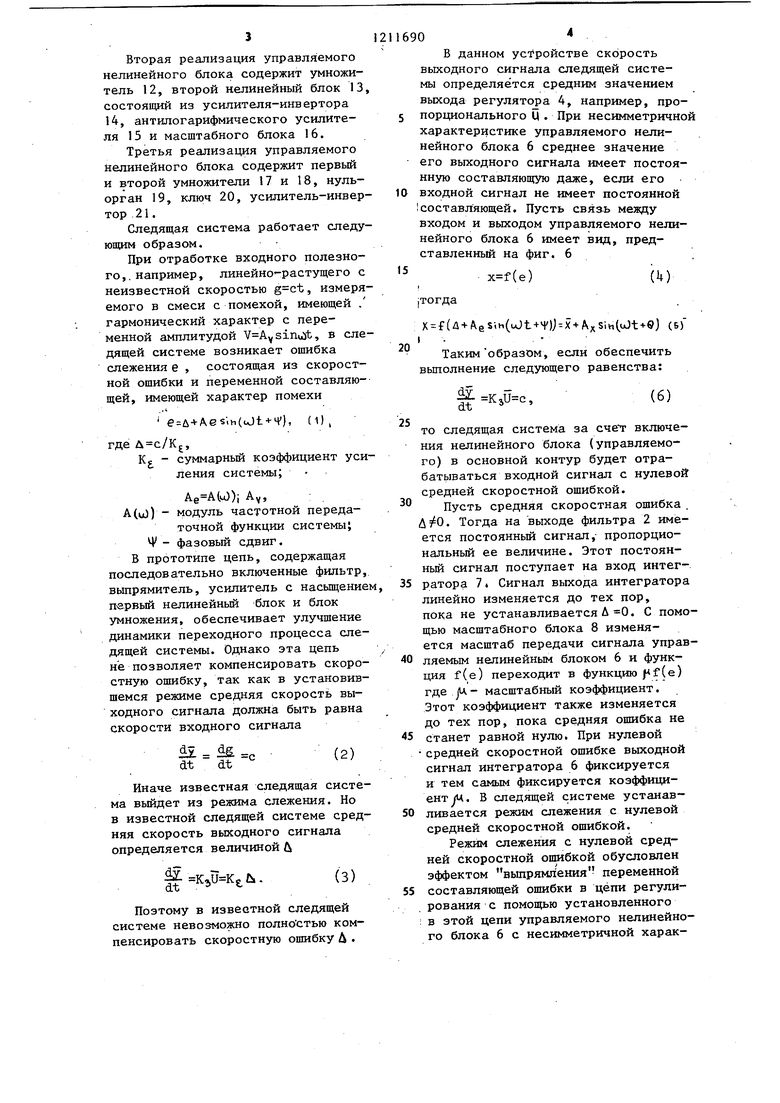
3.Система по п. 1, отличающаяся тем, что управляемый нелинейный блок содержит последовательно соединенные умножитель и второй нелинейный блок, выход которого является выходом управляемого нелинейного блока, вход управляемого нелинейного блока соединен с первым входом умножителя, второй вход которого подключен к управляющему входу управляемого нелинейного блока.
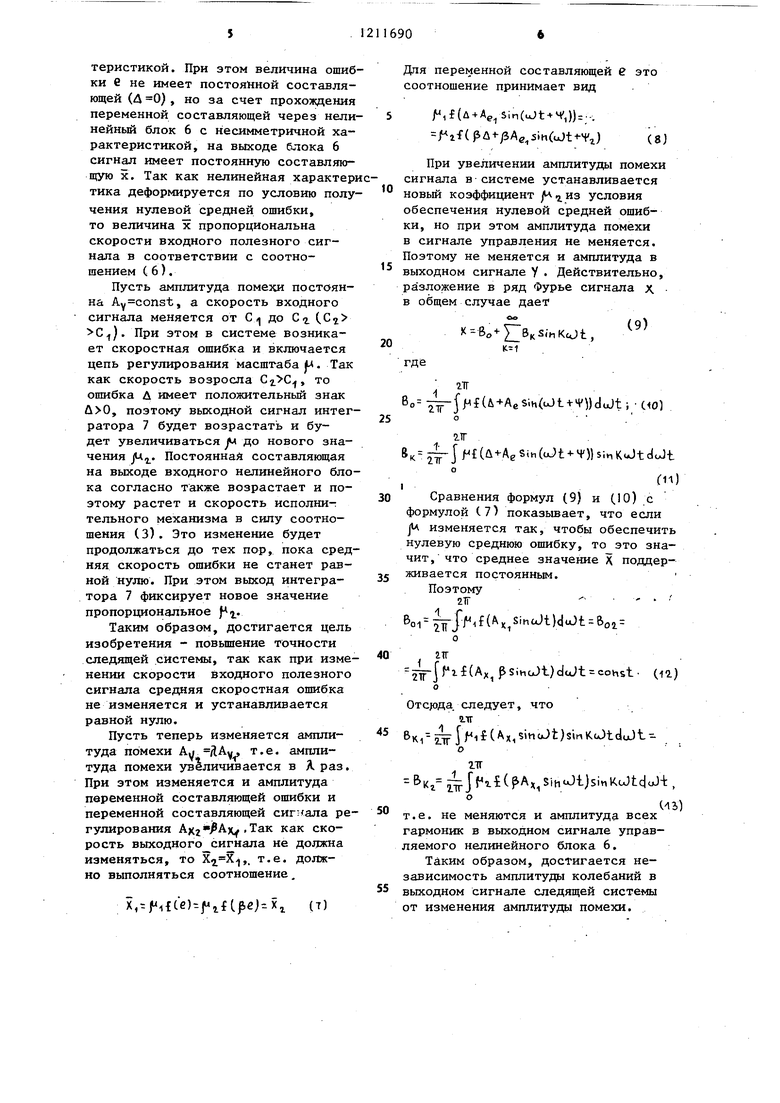
4.Система по п. 3, отличающаяся тем, что второй нелиI
Изобретение относится к автоматическим следяпщм системам и предназначено для отслеживания входного полезного сигнала, измеряемого в смеси с помехой переменной интенсивности.
Цель изобретения - повьшгение точности и помехозащищенности.
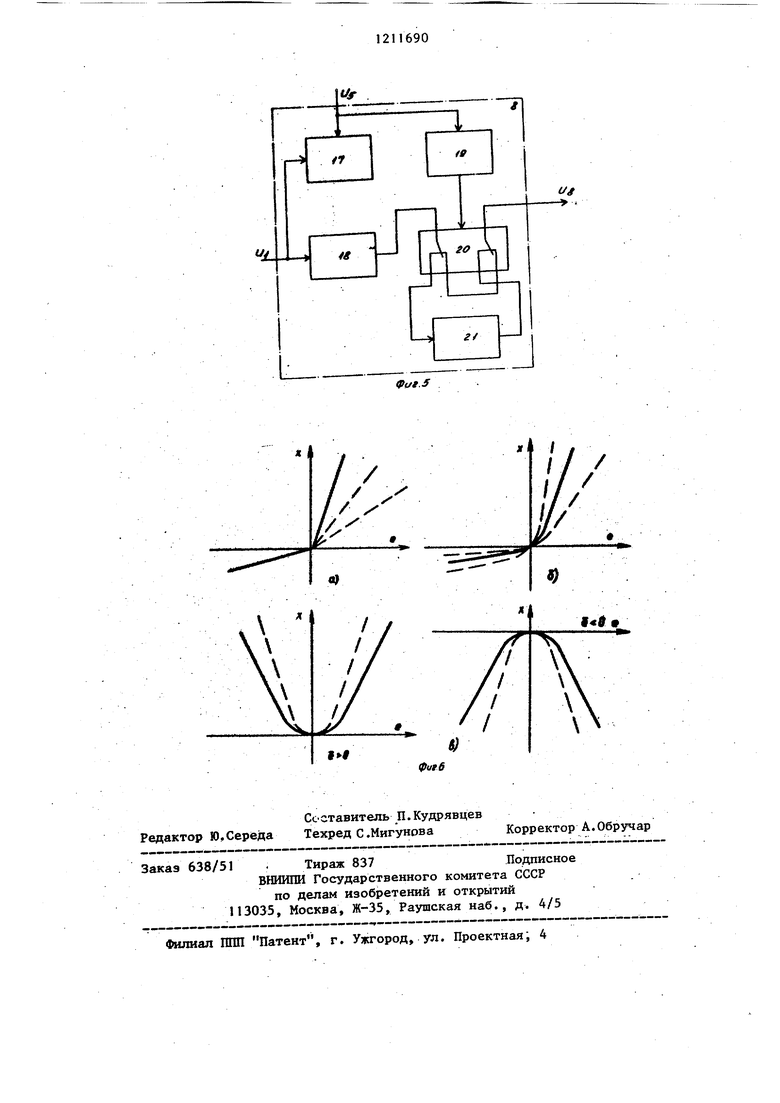
. На фиг. I приведена блок-схема предлагаемой следящей системыj на фиг. 2 - первая реализация управляемого нелинейного блока; на фиг.З блок-схема второй реализации управляемого нелинейного блока; на фиг.4 блок-схема второго нелинейного блока; на фиг. 5 - блок-схема третьей реализации управляемого нелинейного блока} на фиг. 6 - функции.
1690
нейный блок состоит из последовательно соединенных усилителя-инвертора, антилогарифмического усилителя и масштабного блока.
5. Система по п. 1, отличающаяся тем,что, с целью повышения точности отслеживания линейно-растущего сигнала, управляемый нелинейный блок содержит первый и второй умножители, усилитель-инвер- тор, ключ, нуль-орган, выход которого соединен с управляющим входом ключа, первый разомкнутый контакт ключа через усилитель-инвертор подключен к.второму разомкнутому контакту ключа,первый замкнутый контакт ключа связан с вторым замкнутым контактом ключа, второй перекидной контакт ключа подсоединен к выходу управляемого нелинейного блока, вход управляемого нелинейного блока объединен с первыми входами первого и второго умножителей, выход второго умножителя соединен с первым перекидным контактом ключа, управляющий вход нелинейного блока объединен с входом нуль-органа и вторым входом первого умножителя, выход которого подключен к второму входу второго умножителя,
реализуемые управляемым нелинейным блоком.
Блок-схема следящей системь содержит измеритель 1 рассогласования, фильтр 2, усилитель 3 с насьш1ением, регулятор 4, исполнительный механизм 5, управляемый нелинейный блок 6, интегратор 7 и масштабный блок 8.
На фиг. 1 приняты следующие обо- значения J g - входной сигнал} V- сигнал помехи; е - сигнал ошибки следящей системы; х - выход управляемого нелинейного блока, - вы- ход регулятора у - выходной сигнал следящей системы.
Первая реализация управляемого нелинейного блока содержит нуль-ор- .ган 9, умножит ель 10 ключа 11.
Вторая реализация управляемого нелинейного блока содержит умножитель 12, второй нелинейный блок 13, состоящий из усилителя-инвертора 14, антилогарифмического усилителя 1 5 и масштабного блока 16.
Третья реализация управляемого нелинейного блока содержит первый и второй умножители 17 и 18, нуль- орган 19, ключ 20, усилитель-инвертор .21.
Следящая система работает следующим образом.
При отработке входного полезного,, например, линейно -растущего с неизвестной скоростью , измеряемого в смеси с помехой, имеющей . гармонический характер с переменной амплитудой V AySin it, в следящей системе возникает ошибка слежения е , состоящая из скоростной ошибки и переменной составляющей, имеющей характер помехи
e u+Aes n(), (1) ,
где
Kg - суммарный коэффициент усиления системы;
)| Ау, : А (и)) - модуль частотной передаточной функции системы; Ц - фазовый сдвиг. Б прототипе цепь, содержащая последовательно включенные фильтр выпрямитель, усилитель с насыщение первый нелинейный блок и блок умножения, обеспечивает улучшение динамики переходного процесса следящей системы. Однако эта цепь не позволяет компенсировать скоростную ошибку, так как в установившемся режиме средняя скорость выходного сигнала должна быть равна скорости входного сигнала
ii
dt dt
(2)
Иначе известная следящая система выйдет из режима слежения. Но в известной следящей системе средняя скорость выходного сигнала определяется величиной /
f :K3U Kg fci.
(3)
Поэтому в известной следящей системе невозможно полно стью компенсировать скоростную ошибку Д.
11690
В данном устройстве скорость вькодного сигнала следящей системы определяется средним значением выхода регулято)а 4, например, про- 5 порционального Ц. При несимметричной характеристике управляемого нелинейного блока 6 среднее значение его выходного сигнала имеет постоянную составляющую даже, если его входной сигнал не имеет постоянной Iсоставляющей. Пусть связь между входом и выходом управляемого нелинейного блока 6 имеет вид, представленный на фиг. 6
10
15
(e)
(М
(Тогда (A-t-AeSiH(u)t+S )j x-t-AxSinCiOti-Q) (Б)
20
I
Таким образом, если обеспечить вьтолнение следующего равенства:
K,ii
dt
,
(6)
25
30
то следящая система за счет включения нелинейного блока (управляемого) в основной контур будет отрабатываться входной сигнал с нулевой средней скоростной ошибкой.
Пусть средняя скоростная ошибка . . Тогда на выходе фильтра 2 имеется постоянный сигнал,- пропорциональный ее величине. Этот постоянный сигнал поступает на вход интег- 35 ратора 7. Сигнал выхода интегратора линейно изменяется до тех пор, пока не устанавливается Л 0. С помощью масштабного блока 8 изменяется масштаб передачи сигнала управ40 ляемым нелинейным блоком 6 и функция f(e) переходит в функцию/ f(e) где jU- масштабный коэффициент. Этот коэффициент также изменяется до тех пор, пока средняя ошибка не
45 станет равной нулю. При нулевой средней скоростной ошибке выходной сигнал интегратора 6 фиксируется и тем самым фиксируется коэффициент (Ц. В следящей системе устанав-
50 ливается режим слежения с нулевой средней скоростной ошибкой.
Режим слежения с нулевой средней скоростной ошибкой обусловлен эффектом вьтрямпения переменкой
55 составляющей ошибки в цепи регулирования с помощью установленного : в этой цепи управляемого нелинейного блока 6 с несимметричной характеристикой. При этом величина ошибки е не имеет постоянной составляющей (Д 0), но за счет прохождения переменной составляющей через нелинейный блок 6 с Несимметричной характеристикой, на выходе блока 6 сигнал имеет постоянную составляющую X. Так как нелинейная характертика деформируется по условию получения нулевой средней ошибки, то величина х пропорциональна скорости входного полезного сигнала в соответствии с соотношением С 6).
Пусть амплитуда помехи постоянна Ay const, а скорость входного сигнала меняется от С (| до С. СС2 С). При этом в системе возникает скоростная ошибка и включается цепь регулирования масштабам. Так как скорость возросла , то ошибка Д имеет положительный знак , поэтому выходной сигнал интегратора 7 будет возрастать и будет увеличиваться до нового значения JU. Постоянная составляющая на выходе входного нелинейного блока согласно также возрастает и поэтому растет и скорость исполнительного механизма в силу соотношения (3). Это изменение будет продолжаться до тех пор, пока средняя скорость ошибки не станет равной нулю. При этом выход интегратора 7 фиксирует новое значение пропорциональное ч.
Таким образом, достигается цель изобретения - повьшгение точности следящей системы, так как при изменении скорости входного полезного сигнала средняя скоростная ошибка не изменяется и устанавливается равной нулю.
Пусть теперь изменяется амплитуда помехи А ЛАу, т.е. амплитуда помехи ув1личивается в А раз. При этом изменяется и амплитуда переменной составляющей ошибки и переменной составляющей сигнала регулирования скорость выходного сигнала не должна изменяться, то ,. т.е. должно выполняться соотношение,
X,tf i{C e) ( (Т)
Для переменной составляющей е это соотношение принимает вид
j,f(u + (uJt + 4,)) ... i-f (()
(8J
При увеличении амплитуды помехи сигнала в системе устанавливается новый коэффициент из условия обеспечения нулевой средней ошибки, но при этом амплитуда помехи в сигнале управления не меняется. Поэтому не меняется и амплитуда в выходном сигнале У . Действительно, разложение в ряд Фурье сигнала х в общем случае дает
20
Bo+ BKSiMKOt,
(9)
К-1
где
гтг
BO IF eS h(oJt-m ))doJt i (.w
о 7.1Г
BK J/ fCu-bAeSihdJt- S MsinKoJtdoJt
,)
Сравнения формул (9) и (10) с формулой (7) показьшает, что если JU изменяется так, чтобы обеспечить нулевую среднюю ошибку, то это значит, что среднее значение х поддерживается постоянным.
Поэтому
2ТГ- . - . ,
Boi fifJj.f(AK,)ltJt-6oi
о г1г.
2Fl - X,PSincJt)du;t cohst. (11) о
. следует, что
ВкгЙг ,5iнoJt),KtJtduJt- o гтг
&K, (A;(SiHoJt)sinKcJtdoJ-t,
°иг)
т.е. не меняются и амплитуда всех
гармоник в выходном сигнале управляемого нелинейного блока 6.
Таким образом, достигается независимость амплитуды колебаний в вьпсодном сигнале следящей системы от изменения амплитуды помехи.
Ui
10
и.
/.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угловых перемещений в код | 1982 |
|
SU1035627A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Адаптивная следящая система | 1984 |
|
SU1288651A1 |
| Следящая система | 1987 |
|
SU1631513A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| Устройство для моделирования выходных сигналов судового гирокомпаса | 1984 |
|
SU1233189A1 |
| Аналого-цифровой интегратор | 1978 |
|
SU805345A1 |
| Самонастраивающийся регулятор | 1979 |
|
SU847273A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |

L..
/
x/
L
Фс/г.д
Г
Фиг.
фиг.г
/
фиг 6
Составитель П.Кудрявцев Редактор Ю, Серед а Техред С .Мигунова Корректор А, Обручар
Закаэ 638/51 . Тираж 837Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная; 4
| СЛЕДЯЩАЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 0 |
|
SU328427A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1973 |
|
SU662910A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
