(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ CIICTEAi УПРАВЛЕНИЯ САМОНАСТРАИВАЮШИХС;9 
| название | год | авторы | номер документа |
|---|---|---|---|
| Система идентификации параметров многомерного нелинейного динамического объекта | 1986 |
|
SU1385122A1 |
| Однопараметрический аналоговый оптимизатор | 1982 |
|
SU1076925A1 |
| Устройство для управления неустойчивым экстремальным объектом | 1982 |
|
SU1034015A1 |
| Дистанционный измерительный орган | 1985 |
|
SU1343495A1 |
| Система автоматической оптимизации | 1972 |
|
SU451056A1 |
| Устройство для моделирования характеристики люфта | 1978 |
|
SU744636A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2005 |
|
RU2322680C2 |
| Устройство для оценки деятельности операторов систем управления | 1978 |
|
SU752458A1 |
| Экстремальный регулятор | 1981 |
|
SU974340A1 |
| Система автоматического управления | 1984 |
|
SU1168897A1 |
1
Изобретение относится к области технической кибернетики и предназначено для моделирования самонастраивающихся систем управления. Полученная модель объекта может использоваться, например, для опти- мизации управления 1;ехнологическими процессами.
Известны устройства для моделирования самонастраиваюишхся систем управления, содержащие интегратор и блок определения условных экстремумов. Однако эти устройства имеют невысокое быстродействие, что объясняется взаикшым влиянием каналов из.eнeния настраиваемых параметров моде
:ли. ---- ---Для увеличения быстродействия в предлагаемом устройстве каналы настройки специальным образом разделены и сгруппированы. В нем установлены блок памяти, первый выход которого подключен ко входу интегратора, блок формирования направлений и блок определения начальных условий, входы которых подключены соответственно ко второму и третьеь{у выходак блока памяти, и последовательно соединенные блок
генерации прямолинейных движений и блок формирования функционала, выход которого подключен ко входу блока определения условных экстремумов, причем выходы блоков определения начальных условий и формирования направлений соединены с соответствующими входами блока генераци прямолинейнъ1Х движений, а выход блока определения экстремумов подключен ко входу блока памяти.
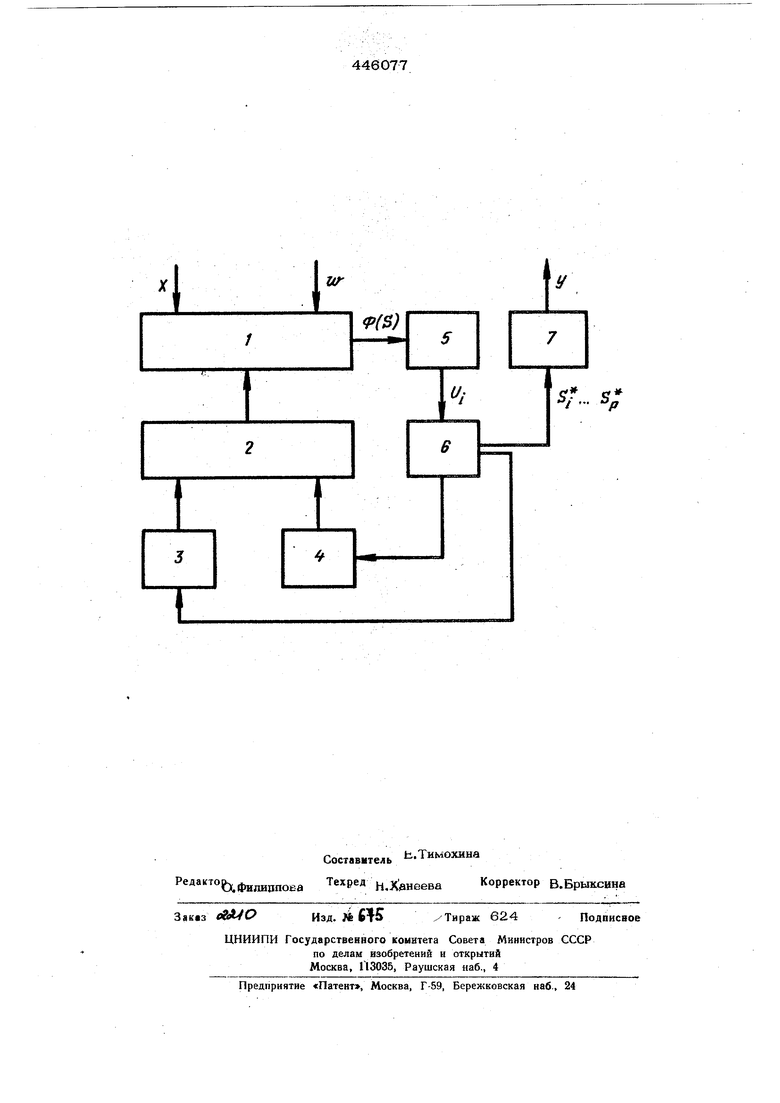
На чертеже представлена функциональна схема предлагаемого устройства.
OHO содер 1(ит блок 1 формирования функционала блок:. 2 генерации прямолинейных движений, блок 3 определения начальных условий, блок 4 форкшрования направлений, блок 5 определения условных экстремумов, блок 6 памяти и интегратор
:7.
Блок формирования функционала 1 предназначен для образования по матрице X входов объекта и вектору W его выхода функционала Ф ( S ) ошибок модели объекта управления.
Блок 2 генерирует такие изменения параметров модели, которые соответствуют прямолинейным траекториям в пространстве этих параь етров, проходящим через заданные начальные точки, координаты которых вырабатываются блоком 3, параллельно заданным направлениям, которые формируются блоком Блок 5 выделяет точки у , где достигается минимум функционала Ф ( S ) при изменении параметров модели вдоль прямолинейных траекторий, и эти точки запоминаются блоком 6. Причем блоки 3 и 4 имеют два режима: в первом из них блок 3 вырабатывает началь ные точки EL по двум исходным точкам ,,,d3vi4 -- ) . ,ea,€3,e4o...), (e,d2,d3,d4,.,.) ,e2,d3.i4.-) Ез(а|еэ.1,-) ,е2,еэ,44,.) обшим числом 2 , где m - количество неизвестных параметров модели, а блок 4 формирует направления, параллельные одно из выбранных координатных осей. Во второ режиме блок 3 в качестве начальных точе выдает точки U , хранящиеся в блоке 6, а блок 4 вырабатывает направления, парал лельные отрезкам, соединяющим пары тех же точек J f . По окончании процесса настройки в блоке памяти 6 оказывается зафиксированной точка (S So,-) S ) доставляющая .J функционалу ф ( S ) и имеющая своими координата ш искомые значения naf метров модели. Бло 7 формирует дифференциальные уравнения траектории наискорейшего спуска в прост ранстве управляющих переменных объекта, интегрирует их на заранее заданном промежутке времени и образует новые зна- чения управляюишх переменных V . В исходном положении все блоки находятся в режиме ожидания. С приходом сигналов, соответствуюишх матрице X и вектору W , начинается их работа. Сначала в блоке 1 формируется функционал Ф ( 5 ) и затек блок 2 начинает nof. чередно генерировать прямолинейные движения с помощью блоков 3 и 4, работающих в первом рехшме, В общей сложности генерируется 2 таких движений, и в процессе калодого из них блок 5 выделяет точку и t условного минимума функционала ф ( S ), которая запоминается блоком 6. Таким образом в блоке 6 фикси руется первая серия точек U . Затем блоки 3 и 4 переключаются на второй режим и начинают BKtecTe с блоком 2 образовывать прямолинейные движения.по последовательным парак:Отточек j- , начиная с первой. Общее чисво таких движений лтл . J . .--. : в этой серии 2 а блоки 5 и 6 фиксируют новую серию точек U условных минимумов. Указанные действия повто яются, образуя каждый раз уменьшающуюся серию точек {J условных минимумов. Последняя точка U | зафиксированная в блоке 6 как результат движения по самому общему направлению, соответствует искоК1ЫМ значениям STiS)- ) S параметров модели. Часть этих значений J S 2 Г ( S р , соответствующая Р управляющим переменным, поступает в блок 7, и по ним образуется новое значение управляющих воздействий ((У1)У2))2рЪ обеспечивающее улучшенную величину пока зателя оптимальности управления объекто(л. Предмет изобретения Устройство для моделирования самонастраивающихся систем управления, содержащее интегратор и блок определения условных экстремумов, отличающееся TeNf, что, с целью увеличения быстродействия, оно содержит блок памяги, первый выход которого подключен ко входу интегратора, блок формирования направлений и блок определения начальных условий, входы которых подключены соответственно ко второму и третьему выходам блока памяти, и последовательно соединенные блок генерации прямолинейных двинсе {ий и блок формирования функционала, выход которого подключен ко входу блока определения условных экстремумов, причем выходы блоков определения начальных условий и формирования направлений соедиHeribi с соответствующиьли выходаNSH блока генерации прямолинейных движений, а выход блока определения экстремумов подключен ко входу блока памяти.
I
Hf
I
/
s «
- /7
