1
Изобретение может быть использовано в любой отрасли промышленности для хранения мелких штучных грузов, например в приборостроении оно применимо для проведения контрольных испытаний балансовых настольных и настенных часов.
Известны механизированные стеллажи, содержаш.ие каркас с жесткими горизонтальными направляюш,ими и подвижно установленными в них полками для грузов, имеюш,ими упоры, механизм вертикального перемещения полок, выполненный в виде вертикально-замкнутых цепей, снабженных элементами периодического контактирования с упорами полок, и механизм горизонтального перемеш ения полок. Однако такие стеллажи конструктивно сложны, а их механизмы вертикального и горизонтального перемешения не обеспечивают безударного перемещения полок с грузами.
Цель изобретения - упрощение конструкции стеллажа и обеспечение возможности безударного перемещения полок с грузами. Это достигается тем, что элементы периодического контактирования выполнены в виде закрепленных на цепях пальцев, взаимодействующих с упорами полок, а механизм горизонтально-, го перемещения выполнен в виде шарнирно закрепленных на концах направляющих поворотных Г-образных рычагов, взаимодействующих с пальцами цепей при передаче полок с
цепей на направляющие, и установленных на каркасе параллельно направляющим подпружиненных выдвижных щтанг, несущих на концах захваты для полок и связанных с другими концами Г-образных рычагов посредством тяг. Кроме того, полки выполнены в виде вертикальных многоирз сных кассет и снабжены роликами, взаимодействующими с направляющими.
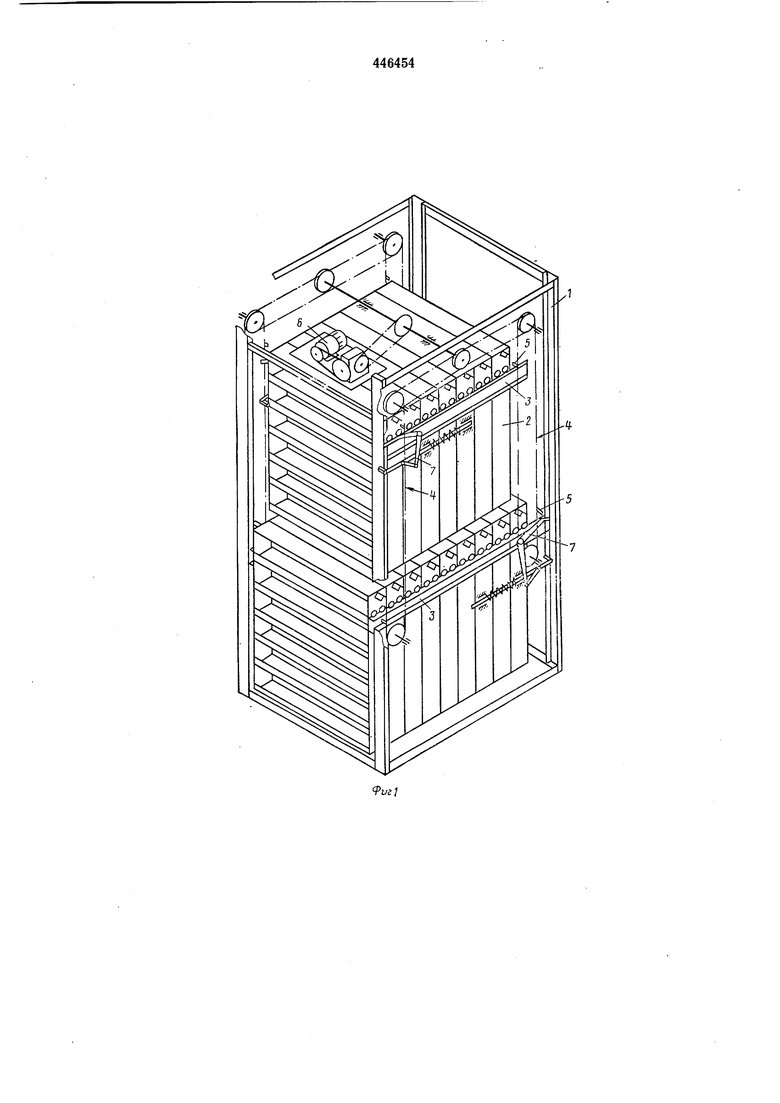
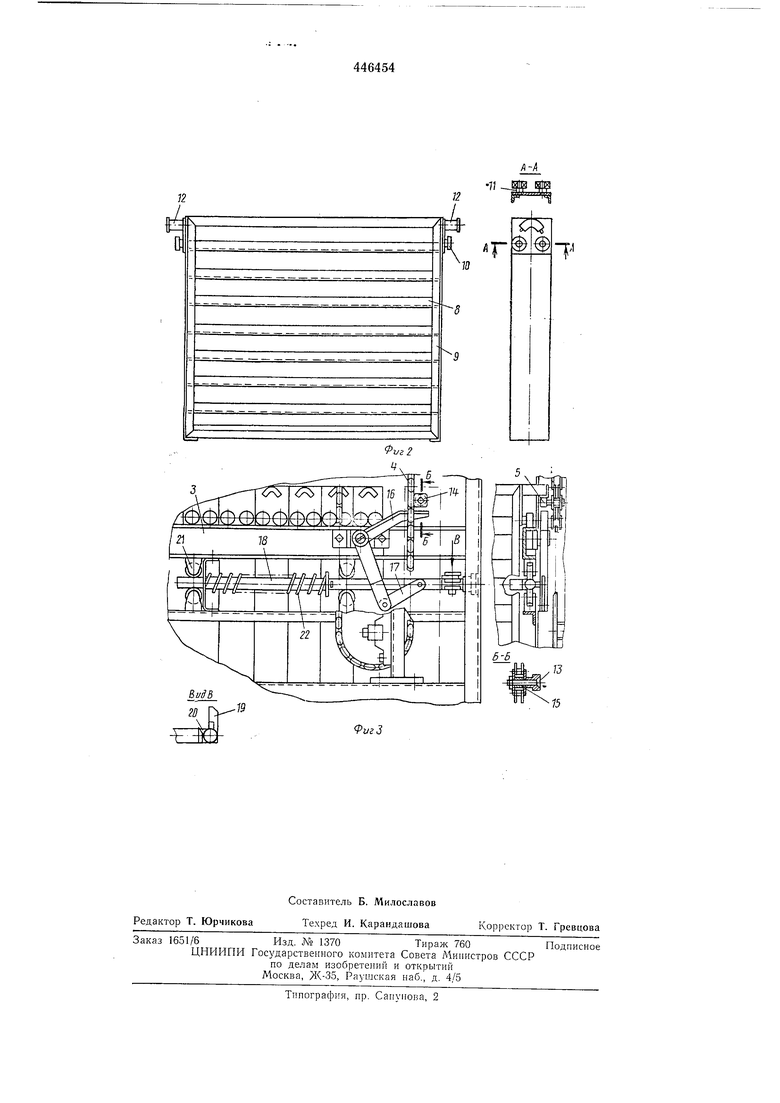
На фиг. 1 схематически изображен предлагаемый механизированный стеллаж для щтучных грузов, общий вид; на фиг. 2 показана его полка-кассета; на фиг. 3 изображен рычажный механизм горизонтального перемещеНИИ полок-кассет.
Стеллаж состоит из каркаса 1 с жесткими горизонтальными направляющими 2; полоккассет 3, подвижно установленных на горизонтальных направляющих; механизма вертикального перемещения 4 полок, выполненного в виде вертикально-замкнутых цепей с закрепленными на них роликовыми пальцами 5; рычажного механизма горизонтального перемещения 6 полок; и привода 7, состоящего из электродвигателя, редуктора, клиноременной и цепной передач.
Полки (см. фиг. 2) выполнены в виде вертикальных многоярусных кассет. Элементы 8 полки собраны на общей жесткой раме 9. По краям полки-кассеты имеют ролики 10, взаимодействующие с направляющими- 2 при горизонтальном перемещении полок, и кроцщтейны-улоры И, взаичмодействующие с роликовыми пальцами 5 цепей механизма вертикального перемещения 4.
Ролики 10 представляют собой шарикоподшипники, напрессованные на оси 12, прикрепленные к раме полки. Роликовые пальцы 5 (см. фиг. 3) представляют собой полые двухступенчатые втулки, которые цилиндрическими осями 13 прикреплены к специальным щекам 14 цепи. Для повыщения жесткости щек между ними вставлены распорные втулки 15.
Рычажные механизмы 6 горизонтального перемещения (ом. фиг. 1 и 3) состоят из щарнирно закрепленных на концах направляющих 2 поворотных Г-образных рычагов 16, взаимодействующих одним концом с роликовыми пальцами 5; плоских тяг 17, соединяющих другие концы Г-образных рычагов с выдвижными щтангами 18, несущими на концах захваты 19 для полок, подпружиненные пружинами кручения 20; роликовых опор 21, предназначенных для установки выдвижных щтанг параллельно направляющим 2; и возвратной пружины 22.
Механизмы вертикального и горизонтального перемещения полок кассет работают следующим образом (см. фиг. 1 и 2).
Роликовые пальцы 5, перемещаясь вертикально, входят в зацепление с кронщтейнамиynopaiMH И полок и удерживают их в процессе перемещения до тех пор, пока полка-кассета 3 роликами 10 не установится на направляющие 2, а пальцы 5 не выйдут из заценления с упоралМи 11.
Продолжая движепие, пальцы 5 начинают взаимодействовать с верхними плечами Г-образных рычагов 16, поворачивая их вокруг неподвижной оси. Рычаг 16, цоворачиваясь, нижним плечом при помощи тяги 17 перемещает щтангу 18. Штанга, перемещаясь в опорах 21, сжимает возвратную пружину ,22 и захватами 19 начинает перемещать полку-кассету по горизонтальным направл ; 0нгим 2 до
тех пор, пока нальцы 5 не выйдут из зацепления с верхними плечами Г-образных рычагов. После этого рычажный механизм горизонтального перемещения полок возвращается в исходное положение пружиной 22.
Рычажные механизмы 6 работают синхроино с движением тяговых цепей механизма вертикального перемещения 4. За счет этого достигается плавное, безударное неремещение полок-кассет как по вертикали, так и по горизонтали.
Предмет изобретения
1.Механизированный стеллаж для штучных грузов, например балансовых настольных и настенных часов, содержащий каркас с жесткими горизонтальными направляющими и цодвижно установленными в них полками для грузов, снабженными упорами, механизм вертикального перемещения полок, выполненный в виде вертикально-замкнутых цепей, снабженных элементами периодического контактирования с упорами полок, и механизм горизонтального перемещения полок, отличающийся тем, что, с целью упрощения его конструкции и обеспечения возможности безударного перемещения полок с грузами, элементы периодического контактирования выполнены в виде закрепленных на цепях пальцев, взаимодействующих с упорами полок, а механизм горизонтального перемещения выполнен в виде щарнирно закрепленных на концах направляющих поворотных Г-образпых рычагов, взаимодействующих с пальцами цепей при передаче полок с цепей на направляющие, и установленных на каркасе параллельно направляющим подпружиненных выдвижных штанг, несущих на концах захваты для полок и связанных с другими концами Гобразных рычагов посредством тяг.
2.Стеллаж по п. 1, отличающийся тем, что полки выполнены в виде вертикальных многоярусных кассет и снабжены роликами, взаи.модействующими с направляющими.
12
12
К Г
С5
Т

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки и разгрузки стеллажей | 1983 |
|
SU1134484A1 |
| Многоярусный стеллаж | 1980 |
|
SU918190A1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Механизированный стеллаж для хранения штучных грузов | 1984 |
|
SU1266799A1 |
| Стеллаж | 1988 |
|
SU1632879A1 |
| ВАГОН ДЛЯ ПЕРЕВОЗКИ СТАЛИ В РУЛОНАХ | 2011 |
|
RU2505436C2 |
| Стеллаж | 1980 |
|
SU981124A1 |
| Многоярусный стеллаж | 1982 |
|
SU1076375A1 |
| Устройство для разгрузки и загрузки стеллажей склада штучными грузами | 1974 |
|
SU547378A1 |