1
Изобретение относится к области трикотажного машиностроения, в частности, к приводу петлеобразующих органов двухфонтурной основовязальиой машины. Известен привод петлеобразуюших органов двухфонтурной основовязальной машины, содержащий кинематически связанные посредством двух подвижных равнодлинных звеньев передаточные механизмы, симметрично расположенные относительно вертикальной оси машины, каждый из которых имеет рычаг и тяги, связанные с брусьями петлеобразуюших органов машины, например игл, и направляюш,ий механизм, включаюш.ий шатун и кривошип, связанные с главным валом машины. К недостаткам известного привода следует отнести:
наличие высшей кинематической пары (качение ролика по профилированному пазу) в направляюшем механизме;
шум, вибрация при работе направляюш,его механизма из-за неизбежного зазора в высшей кинематической паре (ролик не касается одновременно противоположных поверхностей паза);
быстрый износ профиля паза из-за больших контактных напряжений.
Цель изобретения - повышение надежности работы привода.
Это достигается тем, что равнодлинные звенья шарнирно соединены с шатуном направляюш,его механизма в одной точке, описываюшей симметричную замкнутую шатунную кривую, а центр вращения кривошипа лежит на вертикальной оси машины. Длина каждого из равнодлинных звеньев может быть равна радиусу окружности, с которой совпадают два участка замкнутой шатунной кривой. Шатун направляющего механизма может
быть шарнирно связан с ползуном или с прямилом Уатта.
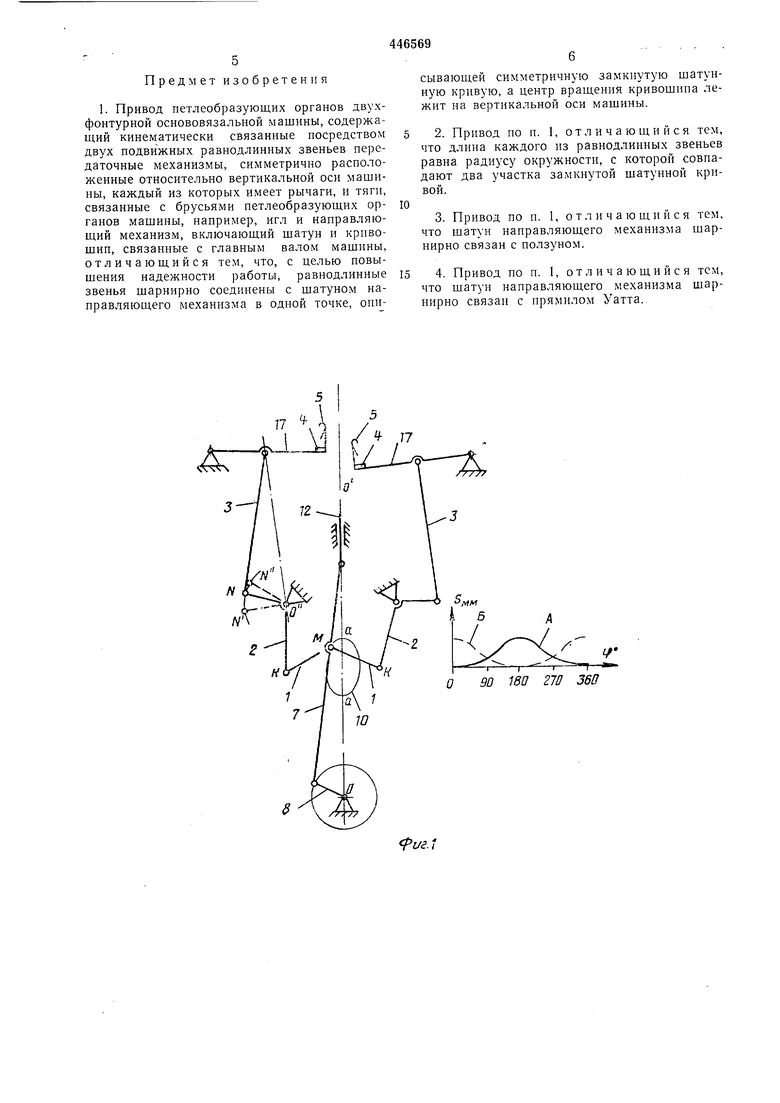
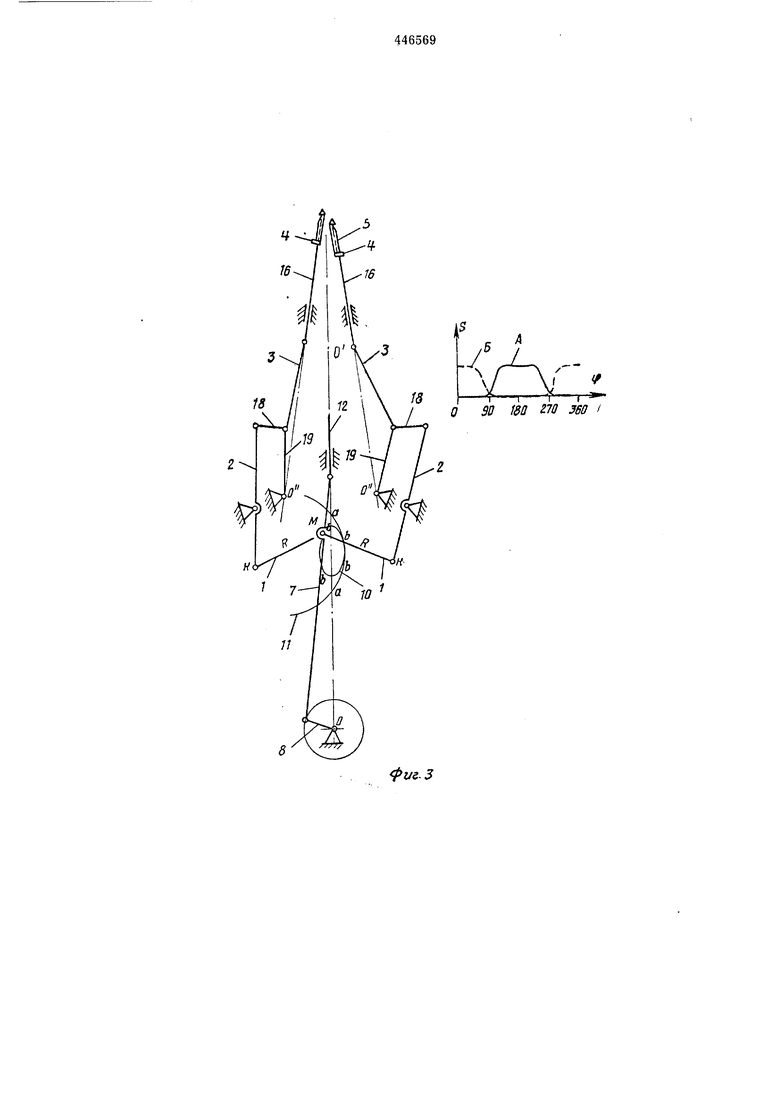
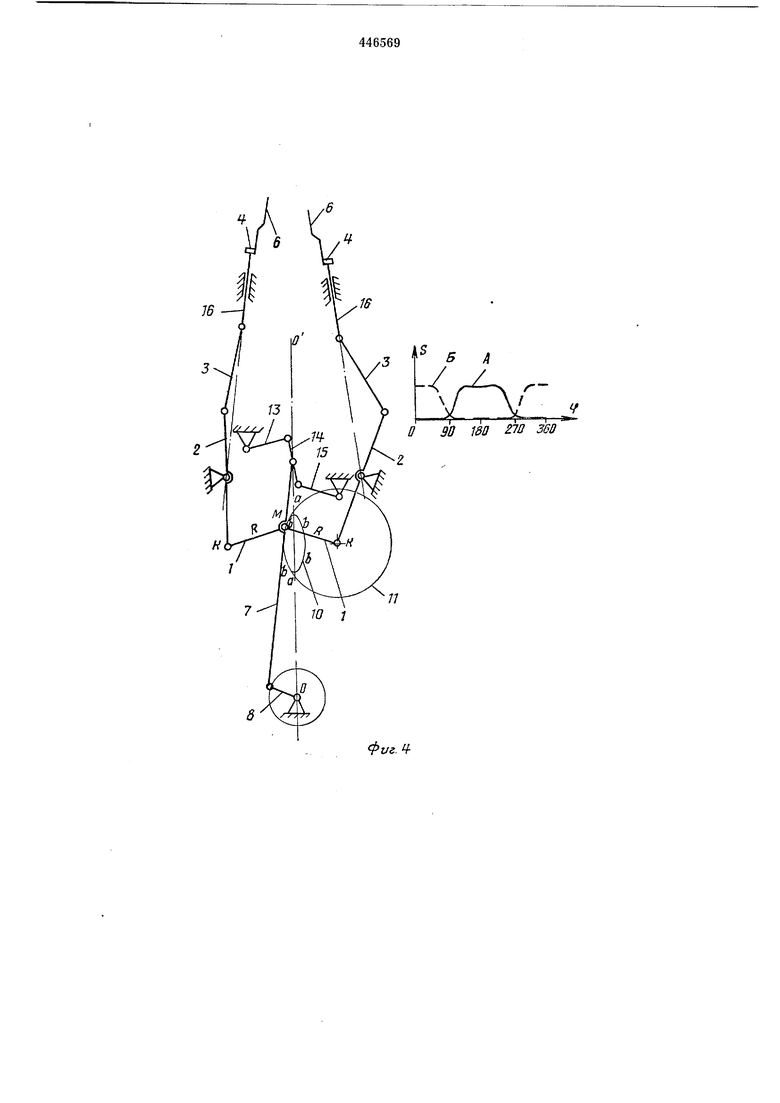
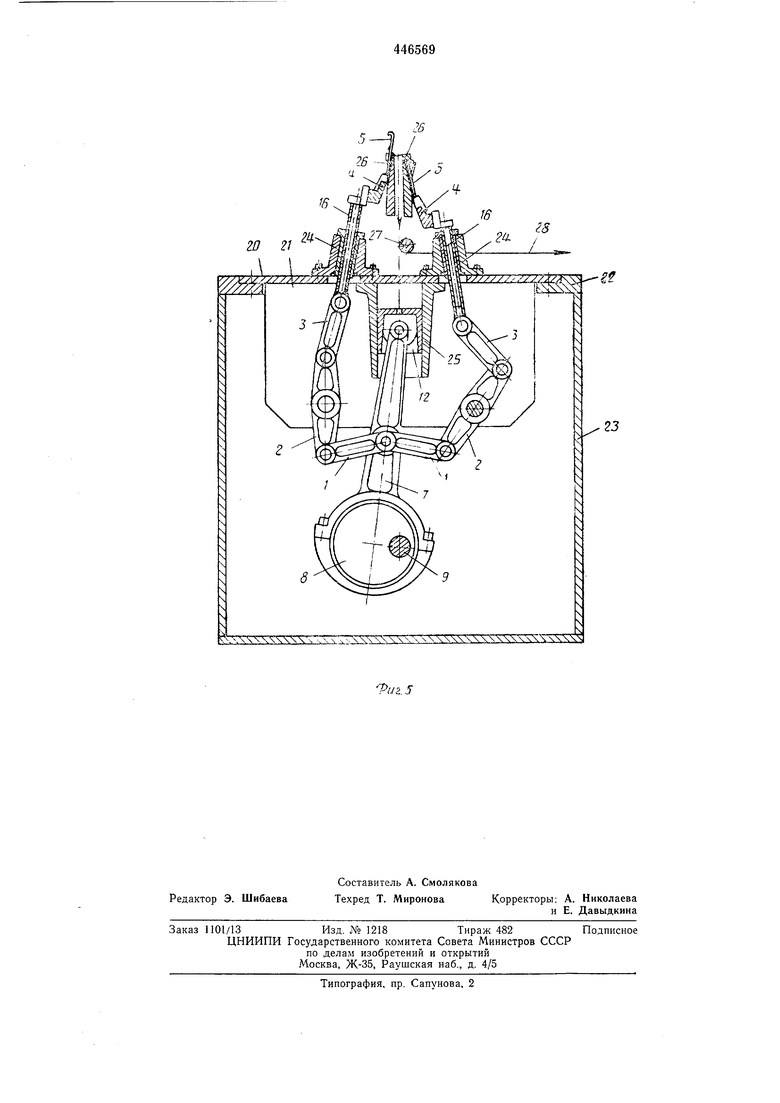
На фиг. 1-4 даны кинематические схемы предложенного привода и соответствующие совмещенные графики движения петлеобразующих органов, различные варианты; на фиг. 5 - разрез машины, иллюстрирующий механизмы привода игольницы, соответствующие кинематической схеме по фиг. 2. На графиках перемещений петлеобразуюших органов показана зависимость перемещения игл 5 в мм от угла ф поворота главного вала. А - кривая перемещения передней игольницы, Б - кривая перемещения задней игольницы.
Привод петлеобразующих органов двухфонтурной основовязальной машины содержит кинематически связанные посредством двух подвижных равнодлинных звеньев 1 передаточные механизмы, включающие симметрично расположенные относительно вертикальной оси О-О машины рычаги 2 с тягами 3 брусьев 4 петлеобразующих органов, нанри мер игл 5 или движков 6 пазовых игл, и на правляющий механизм, посредством шатуна 7 и кривошипа 8 связанный с главным валом машины. Звенья 1 шарнирно соединены с шатуном 7 направляюшего механизма в одной точке М описываюшей симметричную замкнутую ша тунную кривую 10, а центр О вращения кри вошипа 8 лежит на вертикальной оси О - О машины, совпадающей с осью симметрии а-а кривой 10. По второму варианту выполнения привода (см. фиг. 2) длина каждого из звеньев 1 равна радиусу R дуги окружности II, с которой совпадают два участка b-b кривой 10, симметрично расположенной относительно вертикальной оси машины (О -О). По третьему варианту (см. фиг. 3) направляющий механизм представляет собой кривошипно-шатунный аксиальный механизм, содержащий кривошип 8, шатун 7 и ползун 12. По четвертому варианту (см. фиг. 4) шатун 7 направляющего механизма кинематически связан с прямилом Уатта, состоящим из звеньев 13, 14, 15. Игольные брусья 4 соединены с тягами 3 в одном случае посредством ползунов 16 (см. фиг. 2-5), а в другом случае посредством рычагов 17 (см. фиг. 1). Согласно фиг. 3 рычаги 2 связаны с ползунами 16 дополнительными звеньями 18 и 19. Согласно фиг. 5 привод смонтирован в кассете, состоящей из плиты 20 и боковых щек 21. Плита установлена на обработанной поверхности рамы 22 корпуса 23 основовязальной машины. Ползуны 16 перемещаются в направляющих кронщтейнах 24, смонтированных на плите 20. Ползун 12 выполнен в виде поршня, расположенного в направляющем цилиндре 25, смонтированном под плитой 20. Иглы 5 и движки 6 перемещаются относительно отбойных плит 26, между которыми прохонарабатываемое полотдит, огибая вал 27, но 28. Работает привод следующим образом. При равномерном вращении главного вала 9 движение передается через кривошип 8 шатуну 7 и ползуну 12, при этом точка М шатуна 7 описывает симметричную замкнутую кривую 10, по конфигурации близкую к эллипсу. Два, симметрично расположенные относительно оси а-а, участка b-b кривой 10 почти совпадают с дугой окружности 11 радиуса R, поэтому, если длина звеньев 1 равна длине радиуса R (см. фиг. 2, 3, 4), а положение одного из шарниров /С в момент прохождения точки М по участкам b-b совпадает с центром соответствующей окружности 11, то соответствующий рычаг 2, образующий этот шарнир со звеном 1, имеет выстой в крайнем положении. Благодаря этому брусья 4 петлеобразующих органов, связанные с рычагами 2 посредством ползунов 16 и звеньев 3 (см. фиг. 2, 4 и 5) или звеньев 3, 18, 19 (см. фиг. 3), имеют выстой в крайнем нижнем положении (см. фиг. 2, 3 и 4). Если длина звеньев 1 не равна длине радиуса R, а например, несколько больше, то брус 4 имеет не выстой, а замедленное движение (см. фиг. 1). Если, по условиям-процесса петлеобразования, необходимо осуществлять выстой игольных брусьев 4 и в крайнем верхнем положении, то это достигается за счет двойного качения рычага 2 и звена 3 (см. фиг. 2 и 4) или соответственно звена 19 и звена 3 (см. фиг. 3) относительно предельного положения, т. е. такого положения, когда звено 3 и верхняя часть рычага 2 или звено 3 и звено 19 образуют прямую линию. Выстой игольного бруса 4 в крайнем верхнем положении получается приближенным, т. е. брус не выстаивает неподвижно, а колеблется (см. фиг. 2, 3, 4) относительно предельно-верхнего положения, поэтому на графике перемещения выстой бруса в верхнем положении выражен не прямой, а волнообразной линией. Качество выстоя в верхнем положении и его длительности, при заданных размерах звеньев механизма, определяется углом , биссектрисой которого является прямая, образуемая звеном 3 и рычагом 2 при качании относительно предельного положения (см. фиг. 2), где точками N и N обозначены крайние положения шарнира N, а угол - полный угол качания рычага 2. Если же по условиям процесса петлеобразования осуществлять выстой в крайнем верхнем положении не требуется, то это достигается таким построением кинематической схемы передаточного механизма, когда качания звена 3 и рычага 2 относительно предельного положения не происходит. Такое построение передаточного механизма дано на фиг. 1, где видно, что рычаг 2 имеет другую конфигурацию, чем например, на фиг. 3 и при полном качании на угол не переходит совместно со звеном 3 через предельное положение. Как видно из графика перемещения игольного бруса 4 (см. фиг. 1), выстой в крайнем верхнем положении отсутствует и игольный брус перемещается по плавной кривой. Так как равнодлинные звенья 1 щарнирно оединены с шатуном 7 направляющего мехаизма в одной точке, описываюшей симметичную замкнутую шатунную кривую 10, а ентр вращения кривошипа О лежит на верикальной оси машины, совпадающей с осью имметрии а-а шатунной кривой, то послеовательные перемещения игольниц сдвинуты о фазе на 180° (см. фиг. 1, 2, 3, 4). Предлагаемый привод может быть примеен как на двухфонтурных основовязальных ашинах, оснащенных известными иглами, ак и на двухфонтурных вязально-прошивных ашинах, оснащенных пазовыми иглами с застренной головкой (см. фиг. 3, поз. 5).
Предмет изобретения
1. Привод петлеобразующих органов двухфонтурной основовязальной машины, содержащий кинематически связанные носредством двух подвижных равнодлинных звеньев передаточные механизмы, симметрично расположенные относительно вертикальной оси машины, каждый из которых имеет рычаги, и тягн, связанные с брусьями петлеобразуюш,их органов машины, например, игл и направляющий механизм, включающий шатун и кривошип, связанные с главным валом мащины, отличающийся тем, что, с целью повыщения надежности работы, равнодлинные звенья шарнирно соединены с шатуном направляющего механизма в одной точке, описывающей симметричную замкнутую шатунную кривую, а центр вращения кривошипа лежит на вертикальной оси машины.
2.Привод по п. 1, отличающийся тем, что длина каждого из равнодлинных звеньев равна радиусу окружности, с которой совпадают два участка замкнутой шатунной кривой.
3.Привод по п. 1, отличающийся тем, что шатун направляющего механизма щарнирно связан с ползуном.
4.Привод по п. 1, отличающийся тем, что щатун направляющего механизма шарнирно связан с прямилом Уатта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод игольного двухфонтурной основовязальной машины | 1975 |
|
SU557132A1 |
| Привод движковых игл основовязальной машины | 1973 |
|
SU450008A1 |
| Привод игол двухфонтурной основовязальной машины | 1973 |
|
SU473774A1 |
| Основовязальная машина | 1990 |
|
SU1715902A1 |
| Круглая основовязальная машина | 1978 |
|
SU737529A1 |
| Основовязальная машина | 1989 |
|
SU1708957A1 |
| Основовязальная машина | 1990 |
|
SU1730270A1 |
| Привод составных игл плоской основовязальной машины с двумя игольницами | 1981 |
|
SU1052586A1 |
| Основовязальная машина | 1989 |
|
SU1708958A1 |
| ОСНОВОВЯЗАЛЬНАЯ МАШИНА | 1969 |
|
SU232434A1 |

&
О 90 180 270 360
8
WM
5 A
/
Г
t
If
Q 90 ISO т 360
W
L
ПII
0 90 Ш 7- 360 I
В А
-/
О 90 180 270 360
фvг.Ч
