(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU847275A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Бесконтактная следящая система постоянного тока | 1975 |
|
SU525925A1 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1978 |
|
SU746408A1 |
| Следящий электропривод | 1987 |
|
SU1446600A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Следящая система постоянного тока | 1974 |
|
SU565280A1 |
1
Изобретение относится к высокоточным следящим системам с бесконтактными двигателями постоянного тока (БДПТ)
Известны следящие системы с БДПТ в качестве исполнительных двигателей, в которых, с целью повьпиения точности, вход тахогенератора, установленног.о на входном валу системл, через выпрямитель соединен с сумматором, установленным в основном контуре регулирования 1 .
Этим системам присуща низкая точность, поскольку в режиме вынужденных движений они являются автоколебательными.
Поскольку характеристика нелиней- ной части указанных систем представляет собой нечетно-симметричную функцию, центр автоколебаний в режиме вынужденных движений смещается, и они принципиально имеют ошибку.
Известны следящие системы, содержащие измеритель рассогласования, усилитель, функциональный преобразователь, исполнительный двигатель и редуктор, выход которого соединен с одним из входов измерителя рассогласования.
Точность таких систем повышена. благодаря введению в контур управления сигнала, пропорционального производной от сигнала рассогласования который формируется с помощью дифференциатора ,2 .
Из известных систем по технической сущности наиболее близкой является следящая система, содержащая последовательно сс)единенные измеритель рас10согласования, усилитель, первый выпрямитель, первый сумматор, широтноимпульсный модулятор, блок умножения, второй вход которого соединен с выходом релейного блока, исполнитель15ный двига:тель и редуктор, выход которого соединен с- одним из входов измерителя рассогласования., другой вход которого соединен со входом тахогенератора, выход которого соединен
20 с первым входом второго сумматора, второй вход которого соединён с выходом усилителя, а выход через дифференциатор соединен с первым входом третьего сумматора, второй вход которо25го соединен с выходом тахогенератора, а выход через второй выпрямитель соединен со вторым входом первого сумматора 3 .
У этой систекы недостаточно высо30кая точность.
746405
Цель иэобр тёНяи - n-.jiBbS.iteHи точ йости системы.
Поставленная цель достигается тем, что в предлагаемой системе вход релейного блока соединён с выходом третьего сумматора.
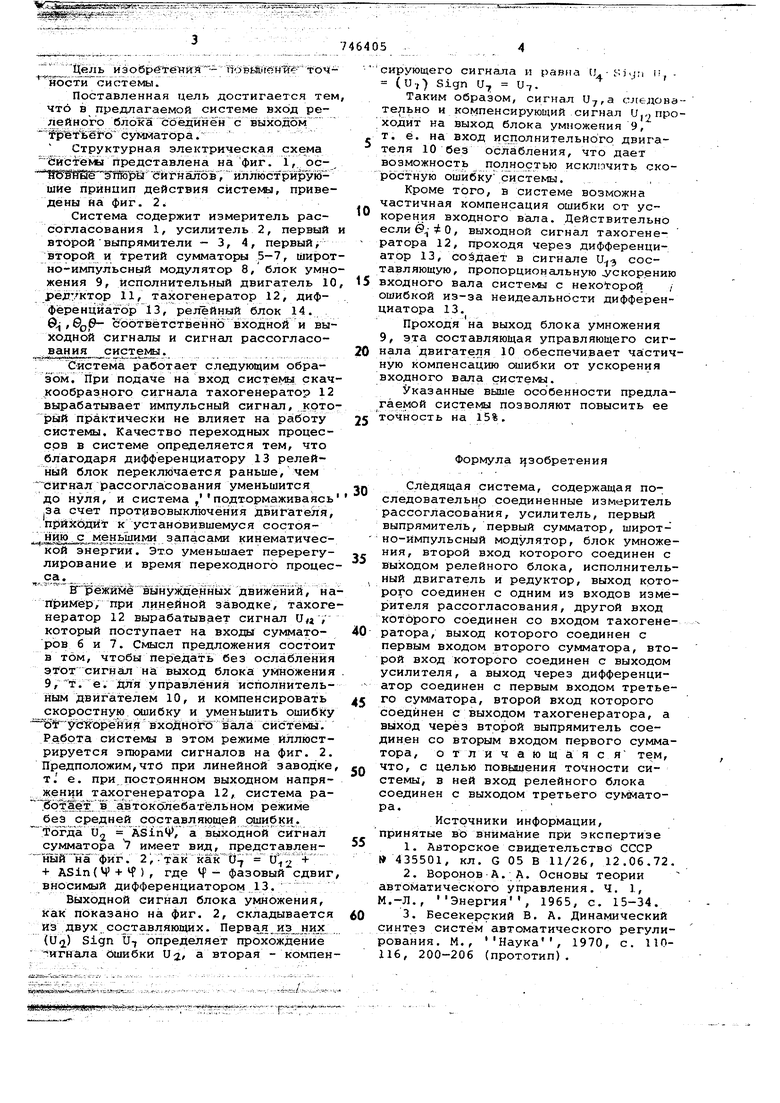
Структурная электрическая схема (ёйстёмы представлена нафиг. 1, ос- 1Н15Шй§ Ш1р с h г н ало в, йл л юст р Иру ioшйе принцип действия системы, приведены на фиг. 2i
Система содержит измеритель рассогласования 1, усилитель 2, первый и второйвыпрямители - 3, 4, первый второй и третий сумматоры 5-7, широтно-импульсный модулятор 8,блок умножения 9, исполнительный двигатель 10, редуктор 11, тахогенератор 12, дифференциатор 13, релёйный блок 14. 0|,0р19- соответственно входной и выходной сигналы и сигнал рассогласо ЛЗШ25„- ЙР ёУ
Система работает следующим образом. При подаче на вход системы скачкообразного сигнала тахогенератор 12 вырабатывает импульсный сигнал, который практически не влияет на работу системы. Качество переходных процессов в системе определяется тем, что благодаря дифференциатору 13 релейный блок переключается раньше, чем Сигнал рассогласования уменьшится до нуля, и система , подтормаживаясь |3а счет противовыключёнйя двигателя, приходит к установившемуся состоянию меньшими запасами кинематической энергии. Это уменьшает перерегулирование и время переходного процес а.
В р1ё:)(й1мё1вынуждённых движений, напримёр, при линейной заводке, тахогенератор 12 вырабатывает сигнал U« , который поступает на входы сумматоров б и 7. Смысл предложения состоит в том, чтобы передать без ослабле-нйя этот сигнал на выход блока умножения . 9, т.е. для управления исполнительным двигателем 10, и компенсировать скоростную ошибку и уменьшить ошибку
У&КЬ&ё Ш зх
Работа системы в этом режиме иллюстрируется эпюрами сигналов на фиг. 2. Предположим,что при линейной заводке, т. е. при постоянном выходном напряЖен1 и тахогенератора 12, система JB йвтЬксУлебатёльном режиме без средней составл.яющей ошибки.
Тогда U2 А81пФ, а выходной сигнал сумматора 7 имеет вид, представленHbjff Ti фиг. 2, -так ui,T +
+ ASin(4 + Ч ) , где Ч - фазовыйсдвиг, вносимый дифференциатором 13.
Выходной сигнал блока умножения, как показано на фиг. 2, складывается из двух составляющих. Первая из ни х . (и.2) Sign U-J определяет прохождение
сигнала Ошибки а вторая - компенсирующего сигнала и равна ;;)jr
1 I (и-,) Sign и, U7.
Таким образом, сигнал и,а cjrejjOBaтельно и компенсирующий сигнал U,,, проУХОДИТ на выход блока умножения 9, т. ё. на вход исполнительного двигателя 10 без ослабления, что дает возможность полностью исключить скоростную ошибку системы.
Кроме того, в системе возможна частичная компенсация ошибки от ускорения входного вала. Действительно если О, выходной сигнал тахогенератора 12, проходя через дифференциатор 13, создает в сигнале Щ составляющую, пропорциональную ускорению входного вала системы с неко1:орой / ошибкой из-за неидеальности дифференциатора 13.
Проходя на выход блока умножения 9, эта составляющая управляющего сигнала двигателя 10 обеспечивает частичную компенсацию ошибки от ускорения входного вала системы.
Указанные выше особенности предлагаемой системы позволяют повысить ее точность на 15%.
Формула 1 зобретения
Следящая система, содержащая последовательнр соединенные измеритель рассогласования, усилитель, первый выпрямитель, первый сумматор, широтно-ймпульсный модулятор, блок умножения, второй вход которого соединен с выходом релейного блока, исполнительный двигатель и редуктор, выход которого соединен с одним из входов измерителя рассогласования, другой вход которого соединен со входом тахогенератора, выход которого соединен с первым входом второго сумматора, второй вход которого соединен с выходом усилителя, а выход через дифференциатор соединен с первым входом третьего сумматора, второй вход которого соединен с выходом тахогенератора, а выход через второй выпрямитель соединен со вторым входом первого сумматора, о тли чающаяся тем, что, с целью повьшения точности системы, в ней вход релейного блока соединен с выходом третьего сукотатора..
Источники информации, принятые во внимание при экспертизе
I 435501, кл. G 05 В 11/26, 12.06.72.
746405
