1
Изобретение относится н оистеиаи автоиативи, иожет быть иопользовано в саионаотраивающихся системах воибинированного регулирования и предназначено для повышення точности работы следящих систем в статических и динамических режимах.
Известны интегрирующие приводы, содержащие последовательно включенные усилитель, исполнительный двигатель с тахогенератором, подключенным к входу усилителя, редуктор и вращающийся трансформатор.
Однако такие приводы требуют .постановки механических упоров, тав как при входном сигнале большой длительности (например, при перебросках) происходит круговое вращение вращащегося трансформал тора и, как следствие, нарушение синфазности выхода с вращающегося трансформатора и. входа подстраи|вавмой следящей системы.
I В предлагаемом устройстве исключение кругового вращения вращающегося трансформатора и обеспечение синфазности выхода с вращающегося трансформатора и входа подстраиваемой следящей системы достигается тем, что выход вращающегося трансформатора подключен к входу усилителя через пороговый
блок.
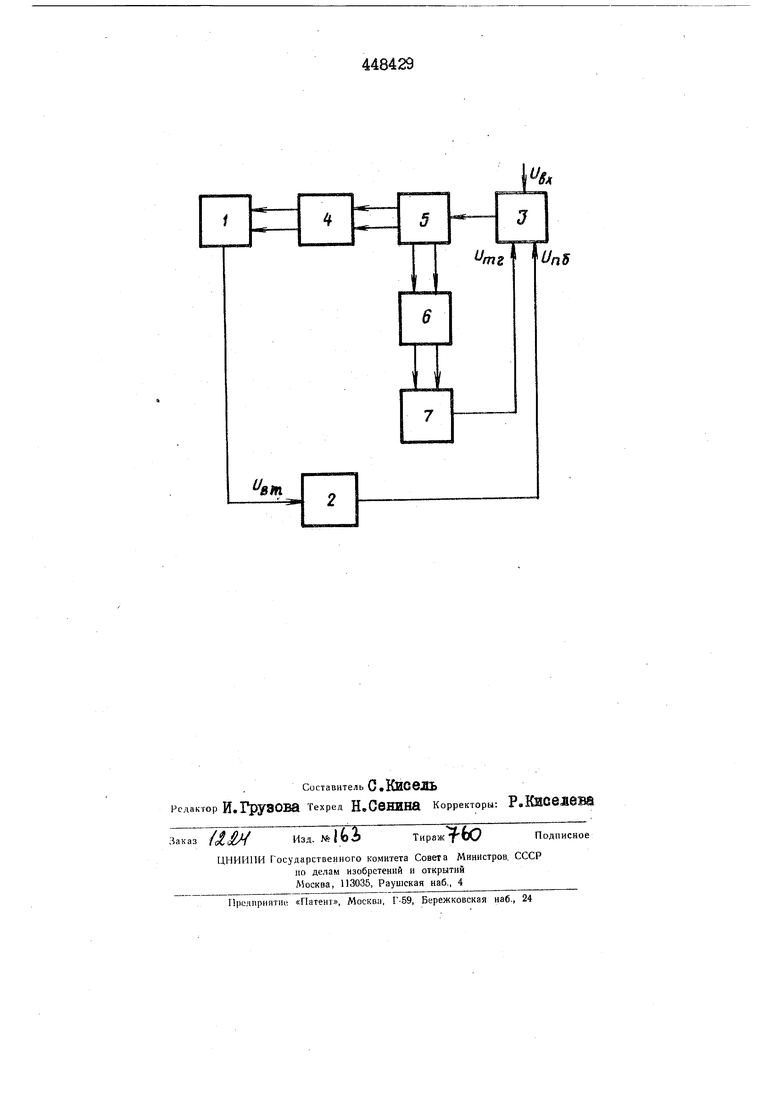
На чертежа представлена блоксхема устройства.
На схеме приняты следующие обозначения: ITcm- - напряжение, пропорциональное углу разворота вращающегося трансформатора; иК( напряжение, пропорциональное углу рассогласования подстраиваемой следящей системы; напряжение, пропорциональное скорости вала исполнительного двигателя; ТЛ Р-напряжение, пропорциональное разности Ши и напряжения порога порогового блока. Устройство содержит вращающийся трансфориатор I, выход воторого подключен через пороговый блон 2 к входу усилителя 5. Ось вращающегося трансформатора механически соединена через редуктор 4 с валом исполнительного двигателя 5, а исполнительный двигатель чере редуктор 6 - с тахоганератором 7, выход которого связан о входом усилителя 5, а выход усилителя с исполнительным двигателей. Кроме того, на вход усилителя поступает напряжение l/Sx Напряжение Щ%. усиленное уси лителем, проходит на исполнительный двигатель 5, который через редуктор 4 разворачивает ротор вра щающегося трансформатора. При отвлоыении ротора вращающегося трано форматора от нулевого положения появляется напряжение НапряЖ9НИЗ используется для исключения кругового вращения вращающегося трансформатора при на- пряжении большой длительности для чего напряжение (JStc с вращающегося трансформатора подает ся чераз пороговый блой на вход еылителй в противофазе с напряжа нием и . Напряжение срайатыва НИН порогового блока выбирается равный 2-3 кратной величине максимально допустимой ошибки подстрой- ваемой следящей системы. При равенстве амплитуд напряжений и икс на входе усилителя дальнейший разворот ротора вращающегося трансформатора прекращается. Таким образом ограничивается угол разворота вращающегося трансФорматора, что позволяет не устанавливать механических ограничите лей, облегчить режим работы исполнительного двигателя и теы самым повысить надежность работы и упростить устройство. ИРЁДМЕ1 ИЗОБРЕТЕНИЯ интегрирующий привод, содержащий последовательно включенные уои литель, исполнительный двигатель с тахоганератором, подключенным к входу усилителя, редуктор и вращающийся трансформатор,, отличаю 1Д и й.е я тем, что, с целью упрощения устройства, в нем установлен подключенный к выходу вращающагоон трансформатора пороговый блок, выход которого соединен е усилителйм.
l%r
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU434373A1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1980 |
|
SU1840930A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU326546A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
Un5
