1
Изобретение относится к следящим системам и приводам со скоростной обратной связью, иснолннтельным элементом которых является асинхронный двухфазный двигатель.
Известны следящие системы, содержащие последовательно соединенные измерительный блок, сул1.матор и усилитель, подключенный к обмотке унравления асинхронного двигателя, вал которого через редуктор соединен с измерительным блорсом, а в цепь питания обмотки возбуждетшя Включоп фазосдвигающий конденсатор, корректирующий блок, синфазный и квадратурны дискриминаторы.
Однако известные системы, в которых в качестве датчика корректирующего сигнала, пропорционального скорости, используется тахомост, недостаточно точны.
Цель изобретения - повышение точности работы системы.
Цель достигается тем, что нредлагаемая следящая система содержит последовательно соединенные источник компенсанионного сигпала, дополнительный сумматор и множнтельно-делительное устройство, другой вход которого через синфазный дискриминатор соединен с выходом усилителя; выход множнтельно-делительного устройства через корректирующий блок подключен к другому входу сумматора, другой вход дополнительного сумматора через квадратурный дискриминатор подключен к фазосдвигающему конденсатору.
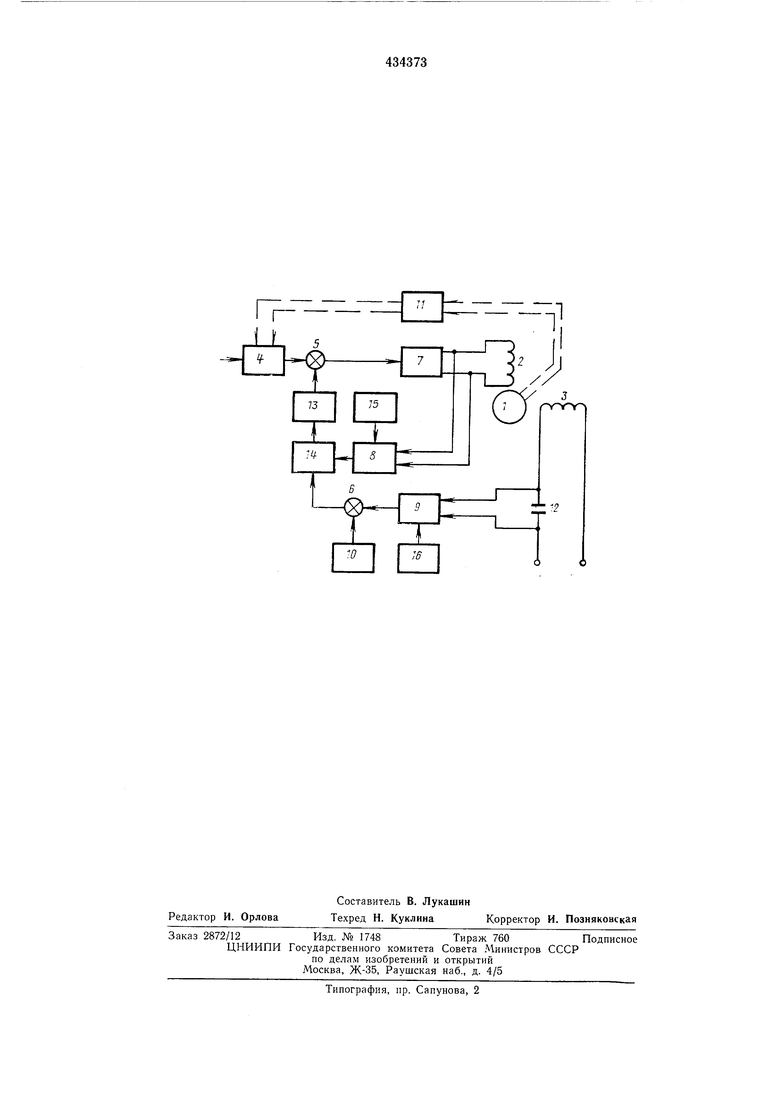
Блок-схема системы нредставлена на черт же. Она содержит асинхронный двухфазный
двигатель 1 с обмоткой управления 2 и обмоткой возбуждения 3, измерительный блок 4, су.маторы 5, б, усилитель 7, синфазный дискриминатор 8, квадратурный дискриминатор 9, источник компенсационного сигнала 10, редуктор 11, фазосдвигающий конденсатор 12. корректирующий блок 13, множительно-делительное устройство 14, источники синфазного 15 и квадратурного 16 напряжений. Работает система следующим образом.
На фазосдвигающем конденсаторе для случая лс л„. (условне кругового поля в асинхронном двзхфазном двигателе при пуске) выделяется напряжение
(,/x),
20
где и а
напряжение сети; скорость двигателя; коэффициент сигнала управления; Гр - активное сопротивление ротора; Лр.- индуктивное сопротивление цепи намагничивания;Хс - сопротивлениефазосдвигающего
конденсатора; / - коэффициент нропорциональ остн.
Ыапряжение, снимаемое с конденсатора, поступает на квадратурный дискриминатор 9, на выходе которого получается выпрямленное напряжение, пропорциональное квадратурной составляющей напряжения на канденсаторе. После сглаживания полученное напряжение складывается в сумматоре 6 с постоянным компенсирующим сигналом источника 10. Компенсирующий сигнал, пропорциональный величине Гр/л;,1, характеризует типоразмер исполнительного двигателя. Физически это означает, что при скорости двигателя, равной нулю (), на сумматор 6 нужно подать такой компенсирующий сигнал, чтобы на выходе сумматора получить нуль напряжения.
Если двигатель начинает вращаться и при этом , то на выходе сумматора 6 напряжение пропорционально скорости вращения и коэффициенту сигнала управления (). Этот сложный сигнал поступает на множительно-делительное устройство 14. Для выделения сигнала, пропорционального скорости, необходимо произвести операцию деления на сигнал ее. Сигнал а заводится на множительно-делительное устройство с обмотки управления двигателя через синфазный дискриминатор 8, подключенный к коммутирующему источнику синфазного напряжения. Выходной сигнал устройства 14 пропорционален скорости вращения двигателя.
Если двигатель вращается в обратном нанравлении, то в этом случае на выходе сумматора 6 напряжение также равно величине , т. е. напряжение пропорционально как скорости вращения двигателя, так и коэффициенту сигнала управления. Но в этом случае в устройстве 14 деление производится на коэффициент, величица которого имеет отрицательный знак (). Поэтому на выходе множ тельно-делительного устройства фаза сигнала, проиорционального скорости (), меняется на обратную. Аналогично происходит переворот фазы сигнала при одном знаке коэффициента сигнала управления в случае «заброса нагрузкой двигателя в тормозной режим.
Предмет изобретения
Следящая система, содержащая последовательно соединенные измерительный блок, сумматор и усилитель, подключенный к обмотке управления асинхронного двигателя, вал которого через редуктор соединен с измерительным блоком, а в цепь питания обмотки возбуждения которого включен фазосдвигающий конденсатор, корректирующий блок, синфазный и квадратурный дискриминаторы, отличающаяся тем, что, с целью иовыщения
точности работы системы, она содержит последовательно соединенные источник компенсационного сигнала, дополнительный сумматор и миожительно-делительное устройство, другой вход которого через синфазный дискриминатор соединен с выходом усилителя, выход множительно-делительного устройства через корректирующий блок подключен к другому входу сумматора, другой вход дополнительного сумматора через квадратурный дискриминатор подключен к фазосдвигающему конденсатору.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1981 |
|
SU962844A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Устройство для позиционного управления электроприводом постоянного тока | 1981 |
|
SU1003286A1 |
| Следящий электропривод | 1983 |
|
SU1131009A2 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1969 |
|
SU235140A1 |
| Следящая система | 1975 |
|
SU555377A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2580823C2 |
| СЛЕДЯЩАЯ СИСТЕМА ПЕРЕМЕННОГО ТОКА | 1967 |
|
SU219663A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2015 |
|
RU2621716C2 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |