Предлагаемая система относится к области автоматизации управления контурным перемещением рабочих органов автоматических устройств и предназначена для использования в системах числового программного управления.
Известны системы числового программного управления, содержащие блок ввода программы, соединенный с блоком управления вводом, блок управления программой, блок управления командой, схему приоритета, схему контроля, магнитный накопитель, выполняющий функции буферного запоминающего блока, оперативных регистров и вычислителя, блок управления приводом станка, управляемый генератор, блок технологических автоматов и пульт управления.
Цель изобретения - расщирение функциональных возможностей устройства и сокращение оборудования.
Это достигается тем, что в систему дополнительно введен блок формирования импульсов настройки магнитных сердечников матрицы на выполнение определенных логических функций, вход которого соединен с
выходом дещифратора кода операции, а выход - с одной из групп адресных шин однородной магнитной матрицы. Вход блока переключения подключен к выходам усилителей воспроизведения и дещифратора кода операции, а его выходы - к формирователям записи, регистру адреса, схеме модификации кода команды, регистру кода операции, йульту управления и управляемому генератору.
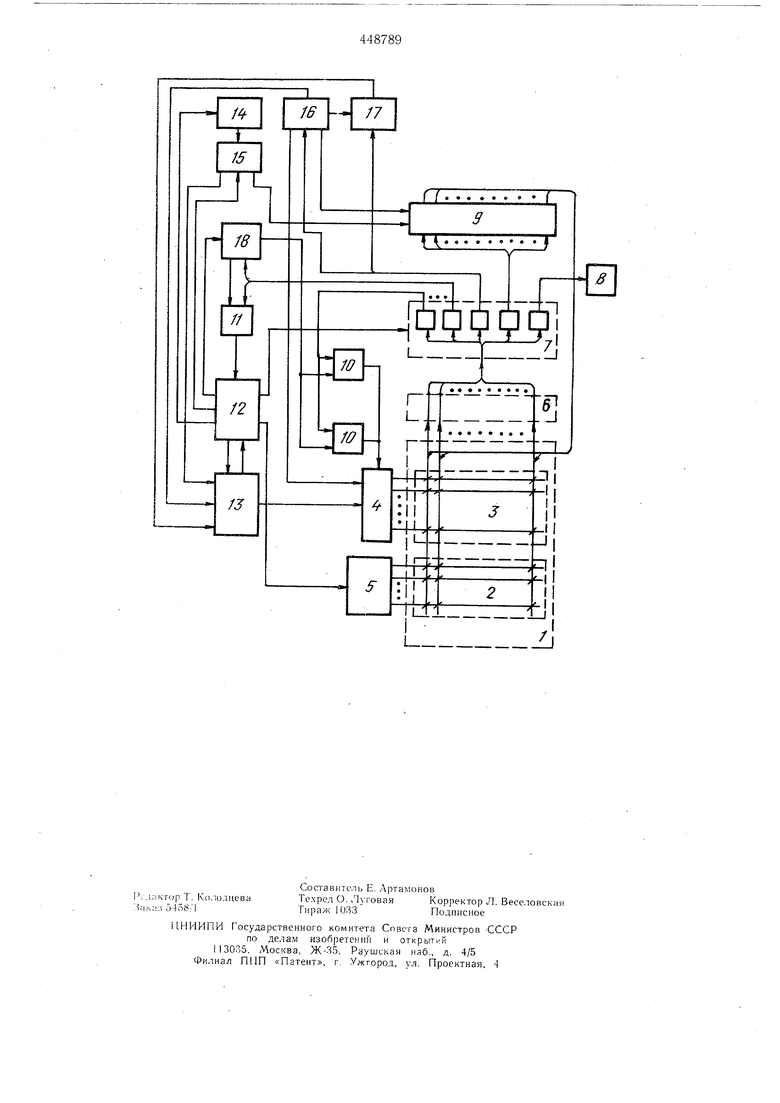
На чертеже представлена блок-схема цифровой системы числового программного управления.
Система числового программного управления содержит магнитный накопите.ль 1, в состав которого входит функциональная часть 2 и хранящая часть 3; дешифратор 4 адреса, выходы которого соединены с адресными входами хранящей части накопителя; блок 5 формирования импульсов настройки магнитных сердечников матрицы на выполнение определенных логических функций, выходы которого подключены к адресным входам функциональной части накопителя; усилители 6 воспроизведения, входы которых связаны с разрядными выходами
магнитного накопителя; блок 7 переключения выходных импульсов усилителей воспро-, изведения, один вход которого соединен с выходами усилителей 6; устройство 8 согласования с блоком управления приводом и внешними устройствами, вход которого подключен к одному из выходов блока 7; формирователи 9 записи, входы которых соединены с одним из выходов блока 7, а выходы - .с разрядными входами .магнитного накопителя; регистры 10 адреса, выходы которых связаны с входами дешифратора 4, а входы -с выходом блока 7. Кроме того, в устройство введены регистр И кода операции, один из входов которого соединен с одним из выходов блока 7; дешифратор 12 кода операции, вход которого подключен к выходу регистра 11, а выходы - к входам 3 блока 7 и к входам блока 5; схема 13 приоритета, один вход .которой соединен с выходом дешифратора. 12, а выходы - с входом дешифратора 12 и с входами депифратбра 4; устройство 14 ввода; регистр 15 ввода, входы которого связаны с выходами устройства 14 и дешифратора 12, а выходы - с входами формирователей 9 и схемы :13; пульт 16 управления, вход которого подключен к одному из параллельных выходных каналов усилителей 6, а выходы - к входам дешифратора 4, формирователей 9, схемы 13; управляемый генератор 17, входы которого соединены с выходом пульта 16 и с одним из выходбв блока 7, а выход - с входом схемы ГЗ; схему 18 модификации кода команды, входы которой связаны с одним из выходов блока 7 и с выходом дешифратора 12, а выходы - с входами регистра 11 и регистра 10. .Вход устройства 14 соединен с выходом дешифратора 12.
Блой формирования импульсов настройки магнитных сердечников накопителя на выполнение определенных .логических функций выдает в зависимости от микрооперации совокупность различных по амплитуде и полярности импульсов тока, которая настраивает магнитные сердечники функциональной части накопителя, как пороговые элементы, на выполнение различных логических операций.
Устройство работает следующим образом.
С пульта 16 управления вводится программа начального ввода: адреса команд через дешифратор 4 поступают на адресные входы храняшей части накопителя, а коды команд через формирователи 9 - на разрядные входы хранящей части накопителя. Затем согласно этой программе по сигналу из дешифратора осуществляется пуск устройства 14 и в накопитель 1 вводится программа работы системы, учитывающая особенности станка, для управления перемещением
рабочих органов которого предназначена данная система. Информация из устройства 14 поступает в регистр 15, затем по сигналу из дешифратора переписывается оттуда через формирователи в функциональную часть накопителя, где происходят проверка правильности работы устройства ввода и преобразование информации в соответ.ствии с .программой начального ввода. После преобразования инфЪрмация переписывается из функциональной части в хранящую часть магнитного .накопителя 1 по адресу, определенному программой начального ввода.. .
Программа работы системы вводится один раз при .ее- настройке для работы с определенным типом станка.
Наличие полного функционального набора логических операций в линейках функционально.й части накопителя с .помощью блока 5, а также операции сдвига при помо-. щи. блока 7 позволяет выполнить в предлагаемом устройстве любую логическую или вычислительную операцию, выразив алгоритм ее вьшо.лнения через элементарные операции. Последовательность проведения элементарных операций определяется дешифратором 12 по Код: операции.
Любая-из команд выполняется следующим образом.
Код команд, состоящий в обще.м случае из кода операции, адреса I операнда, адреса И операнда, адреса результата и адреса следующей. коман.ды, считывается из магнитного накопителя и с выходов усилителей 6 через блок 7 поступает на регистр 11 и регистры 10 адреса, число которых равно Цислу адресов в команде. Из регистра 11 код операции подается в дешифратор 12, который определяет последовательность элементарных операций, необходимых для выполнения данной команды, и запускает блоки 5 и 7. После исполнения очередной команды вдещифратор 4 из регистра 10 поступает адрес следующей команды. Применение свободного следования команд позволяет отказаться от счетчика команд и
5 легко осуществлять безусловные переходы. Наличие схемы 13 приоритета обеспечивает выполнение в первую очередь подпрограмм, имеющих более высокий приоритет, а также прерывание выполнения подпрограмм с более низким приоритетом при поступлении запроса на подпрограмму с .более высоким приоритетом. При таком запросе схема 13 посылает в дешифратор 12 сигнал на прерывание выполняемой подпрограммы. По этому сигналу дешифратор 12 переписывает очередную команду прерываёмой программы по адресу, переданному в дешифратор 4 из схемы 13. После этого из дешифратора 12 поступает сигнал с начала выполнения запрашиваемой подпрограммы, по которому из схемы 13 переписывается в дешифратор 4 адрес первой команды этой подпрогратймы. По окончанИи прерывающей подпрограммы из дешифратора 12 в схему 13 подается сигнал окончания и по нему в дешифратор 4 записывается адрес следующей команды прерванной подпрограммы. В схему 13 могут поступать следующие запросы: из генератЬра 17 - на выполнение подпрограммы определения очередного щага, с пульта 16 - на ввод или вывод информации из регистра 15 и на ввод очередной строки, из дешифратора 12 - на выполнение различных подпрограмм (определение тормозного пути, расчет поправок при изменении размеров инструмента и т. д.). В предлагаемом устройстве возможна модификация кода команды путем его преобразования по определенному алгоритму в функциональную часть магнитного накопителя. За счет такого преобразования осуществляются условные переходы и разветвления,- встречающиеся в выполняемых подпрограммах. Для повышения производительности возможно введение схемы 18, на входы которой поступает код команды, подлежащей модификации, и код числа, модифицирующего команду,- от усилителей 6 через блок 7 и признак модификации От дещифратора 12. Модифицированный код. операции из схемы 18 подается в дешифратор 12, а модифицированные адреса - в регистр 10. Формула изобретения Система числового программного управления, содержащая устройство для хранения и обработки информации, выполненное в виде однородной магнитной матрицы с единой разрядной системой воспроизведения записи, разрядные щины которой подключены через усилители воспроизведения к блоку переключения выходных импульсов, первая группа адресных щин матрицы через дешифратор адреса соединена с выходами регистра адреса, пульта управления, схемы приоритета, входы схемы приоритета подключены к выходам управляемого генератора, пульта управления, регистра ввода и дешифратора кода операции, выход которого соединен с входами устройства ввода, регистра ввода и схемы модификации кода команды, выход которой подключен к входу дешифратора кода операции через регистр кода операции, отличающаяся -ve, что, с целью расширения функциональных возможностей и сокращения оборудования, система дополнительно содержит блок формирования импульсов настройки матрицы, вход которого соединен с выходом дешифратора кода операции, а выход - с одной из групп адресных шин одно родной магнитной матрицы, вход блока переключения соединен .с выходами усилителей воспроизведения и дещифратора кода операции, а его выходы подключены к соответствующим входам формирователей записи, регистра адреса, схемы модификации кода команды, регистра кода операции, пульта управления и управляемого генератора.
/

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство числового программного управления | 1971 |
|
SU441858A1 |
| Управляющий автомат цифрового устройства числового управления | 1972 |
|
SU507153A1 |
| Устройство управления | 1976 |
|
SU650079A1 |
| Оперативное запоминающее устройство | 1983 |
|
SU1095233A1 |
| Устройство для программированияблОКОВ пОСТОяННОй пАМяТи | 1979 |
|
SU794667A1 |
| Устройство для управления системой контроля цифровых схем | 1975 |
|
SU560226A1 |
| ЬИЬЛИО', ЕКА | 1973 |
|
SU365707A1 |
| ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 1989 |
|
RU2028663C1 |
| Микропрограммное устройство управления | 1974 |
|
SU519711A1 |
| Устройство для управления процессом | 1972 |
|
SU478307A1 |