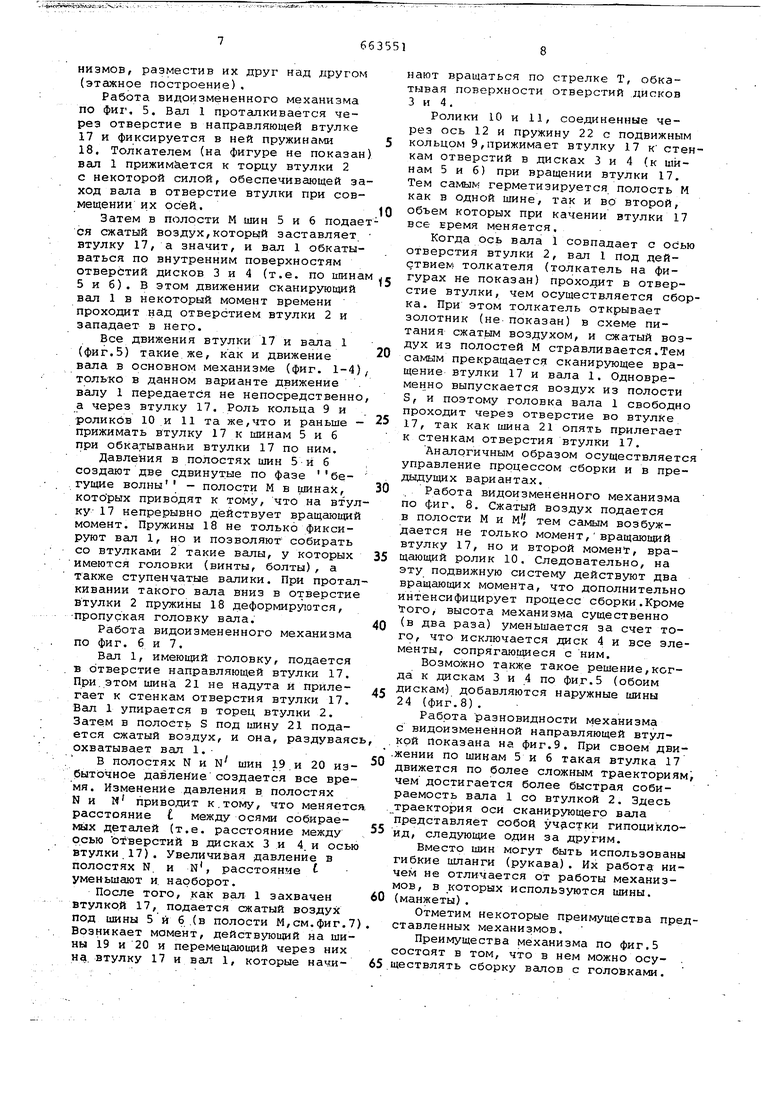
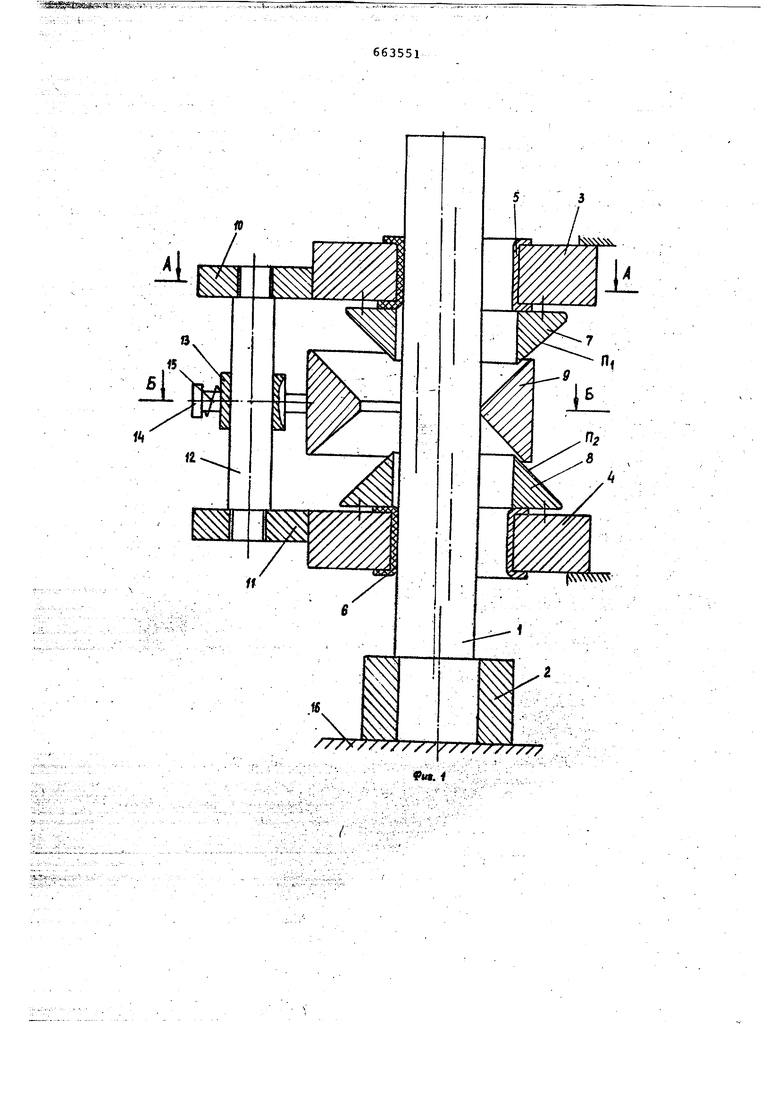
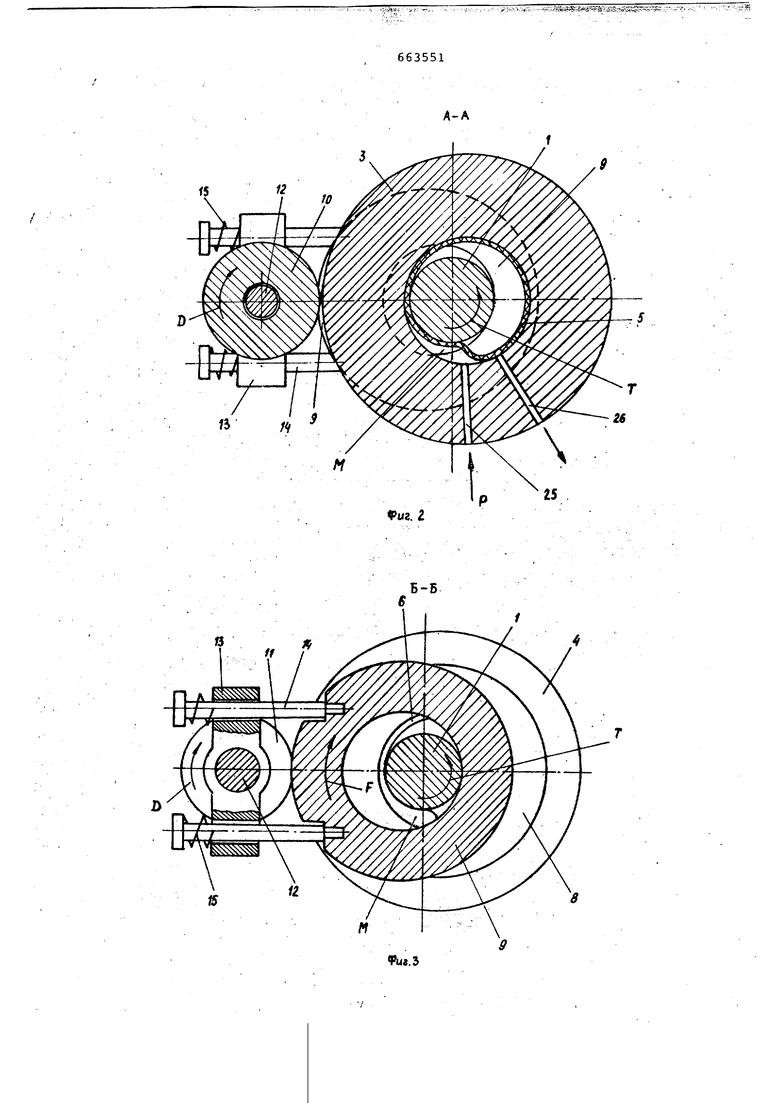
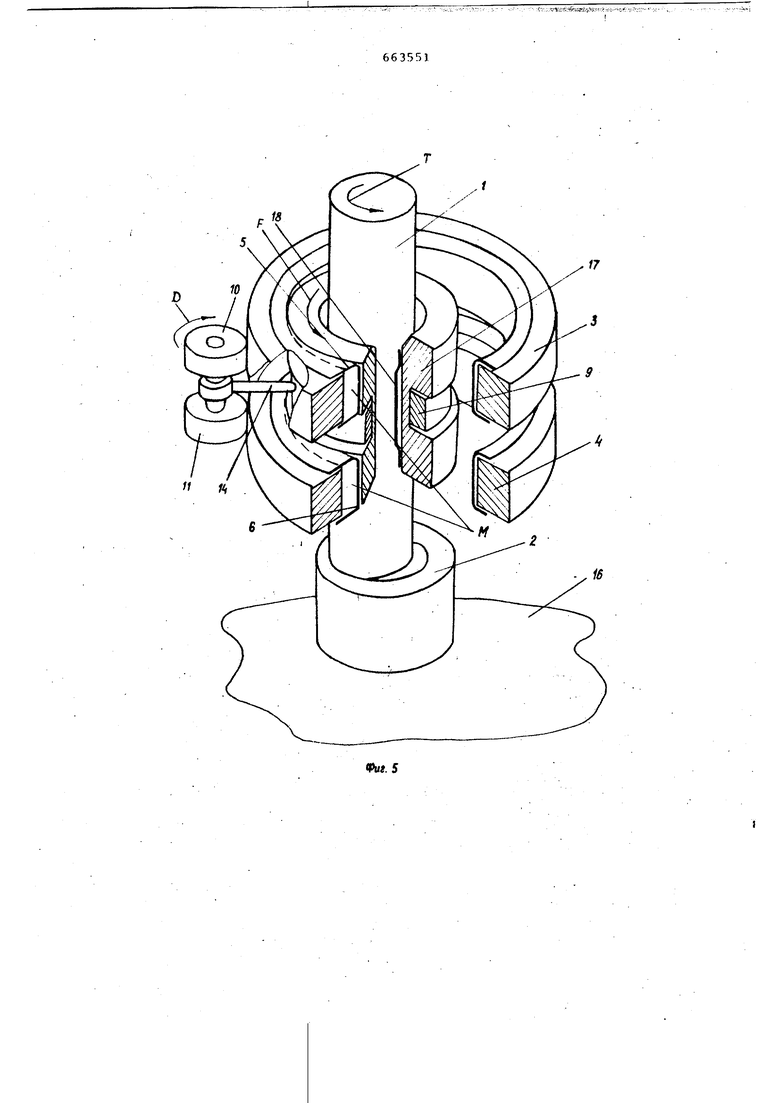
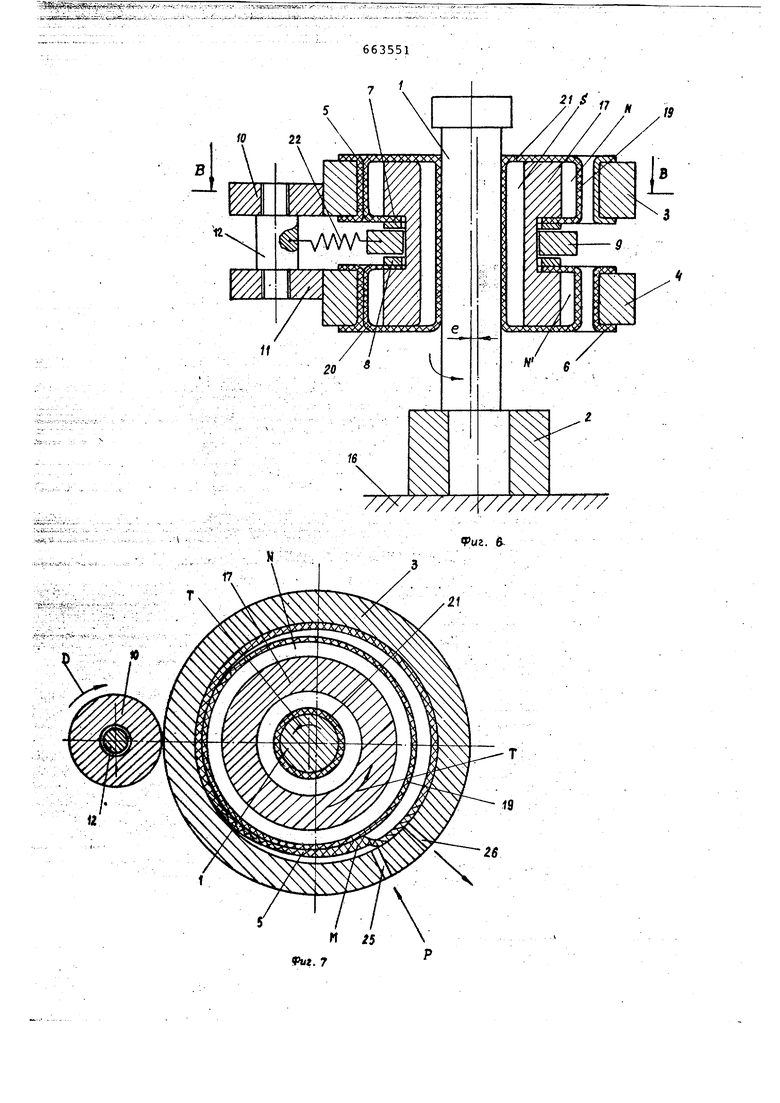
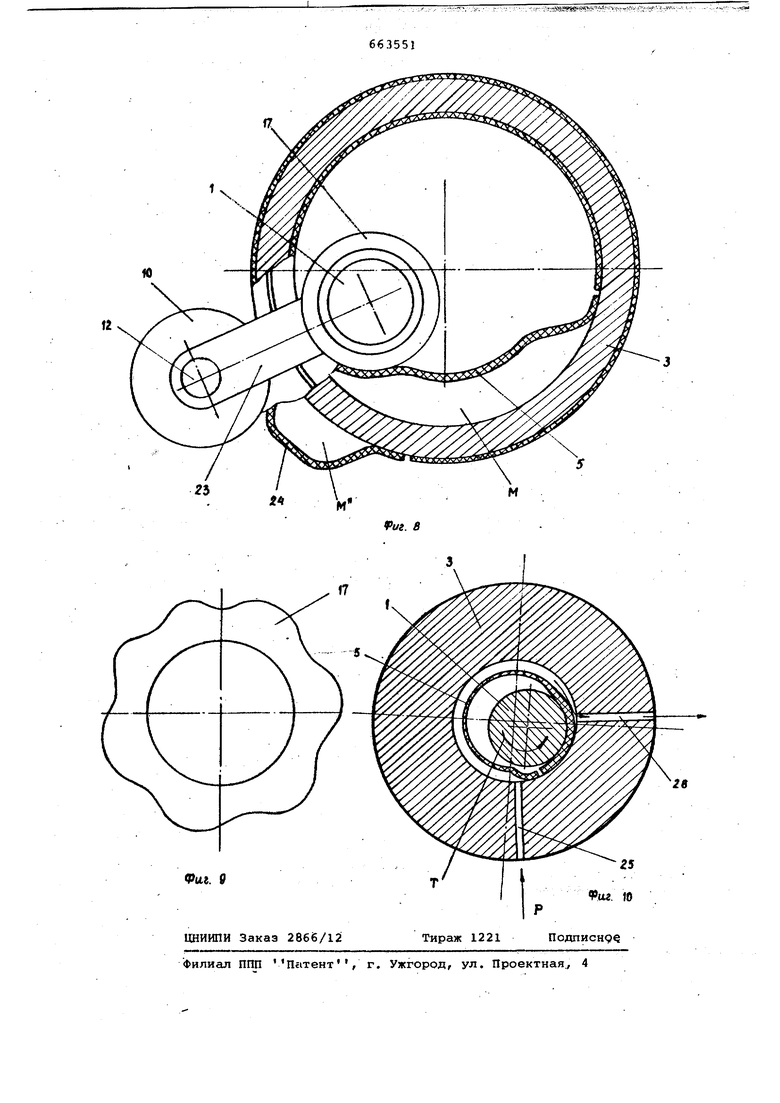
1 ., , Изобретение относится к мёханйЗт мам для сборки УЗ.ПОВ и изделий и может быть применено при автоматизации техно.логи 1еских процессов в маминостроеиии и других отраслях производсфва. Более конкретно, оно относится к группе I сканирующих сборочных механизкюв, т.е. таких механизмов, которыеосуществляют сопряжение деталей в процессе пои.ска . Подобные механизмы иногда называются еще механизмами автопоиска (поисковыми ).юханйэмами) . ВолшийсЕтар известны:х сканир 1цих cQppp HKtx мезсанизмозв и уйт)рЬйств обладаюф :м)алыми {)вгули1рово 1йы да йозмож нрстями; собираемость на них не 1В№г да удовлетворяет требованиям сборочн;6го-йроцесеа; ряд из них слсякны по конструкций и громоздки. У всех у них эрна поиска (сканирования) очень малая - порядка десятых долей мм 11 ИзверТ1Я1Ы акже yqтpoйcтвa, в которых зона дриска (сканирования) зна чит«льно и достигает несколькр ;С2. В этих устройствах аюке реа лизуется метод сканиррвания, когда одна из собираемых деталей осуществл ет движение в плоскости, пёрпендикулярйой оси сборки. Эти движения позвстляют устранить исходное смещение, осей деталей, т.е. устранить погрешности их установки на сборочной позиции 2 .. . Известное устройство содержит дис ки под одну из собираекых детсшей и привод. Известная конструкция -сложна и громоздка,передаваемый крутящий момент мал, а возможности регулировки ограничены.. Цель изобретения - упрощение конструкции и расширение технологических возможнрстей. Цель достигается тем, что на диске жестко смонтированы конусные кольца и эластичные ишны, в дисках выполнены отверстия для подвода и отвода рабочей среды, между дисками распол ржен о с врзможностью осевого перемещения кольцо, имеющее внутреннее конусные поверхности, соответствующие поверхностям жестко установленных конусных колец, подвижное кольцо упруго соединено с блоком ро.пиков, предназначенных для обкатывания по наружной цилиндрической поверхности дисков, на этом кольце может быть смонтирована направляющая втулка с пластинчаты пружинами, размещенными на ее внутре ней поверхности, наружная поверхност этой втулки Мзжет иметь волнообразную поверхность, например, с развер кой по синусоиде, а снаружи и внутри этой втулки могут быть смонтированы эластичные шины. Кроме того эластич ные шины могут быть смонтированы на наружных цилиндрических поверхнойтя дисков и выполнены из шланговых рук вов. На фиг. 1 - изображен сканирующи сборочный.механизм, вид в осевом се чении; на фиг. 2 т сечение по А-А фиг. 1; на фиг, 3 - сечение по Б-Б, на фиг. 1; на фиг, 4 - изображение -механизма в аксонометрии на фиг.5 вариант выполнения механизма (аксонометрия) ; на фиг. б - другой вариа выполнения механизма, продольный разрез; на фкг, 7 - сечение по В-В на фиг. 6; на фиг. 8 - третий вариант выполнения механизма; на фиг.9 видоизмененная форма наружной повер ности направляющей втулки, вид в ллане; на фиг. 10 - вариант относительного расположения подводящего и отводящего каналов для рабочей среды. Сканирующий сборочный механизм предназначен для сборки вала 1 со втулкой 2, . Механизм содержит диски 3 и 4 с отверстиями, неподвижно закреплен ные На основании механизма (основание На фиг. 1-4 условно не показано Вйутренние части отверстий дисков 3 и 4 облицованы эластичными шинами (манжетами) 5 и б, выполняющими роль камер, в которые подается под давлением рабочая среда (воздух, жидкость), Между шинами 5 и б и стенками отверстий в дисках 3 и 4 о разуются в процессе работы полости, например, полость М (см.фиг.2). В эти полости и подается под давлением Р сжатый воздух через отверсти выполненные в дисках 3 и 4. Воздух из полостей М может выходить в атмосферу через другие отверстия в тех же дисках. К дискам 3 и 4 жестко прикреплены конусообразные кольца 7 и 8. Меж кольцами 7 и 8 размещено подвизкное кольцо с конусными внутренними поверхнрстями. Конусные поверхности кольца 9 могут опираться на конусные поверхности П, и П неподвижных колец 7 и 8, С дисками 3 и 4 контактируют ролики 10 и 11, собранные в блок и установленные на оси 12 с возможностью вращения. На оси 12 посеикена подвижно траверса 13, Последняя через .два штыря 14 соединена с подвиж ным кольцом 9. Штыри 14 жестко закреплены в кольце 9. Траверса 13 моет скользить вдоль оси отверстий по штырям 14. Пружины 15, посаженные на штыри, прижимают через траверсу 13 и ось 12 блок роликов к дискам 3 и 4. Таким образом, блок роликов может обкатываться совместно с кольцом 9 вокруг дисков 3 и 4, Собираемая с валом 1 втулка 2 установлена на базе 16 (базирующей поверхности). Внутренние диаметры колец 7 и 8 равны диаметрам отверстий в дисках 3 и 4. Внутренний диаметр кольца 9 близок к диаметру вала 1, но несколько превышает последний, чтобы Bah 1 любого размера в пределах допуска мог свободно входить в это отверстие. На фиг. 1, 3, 4 размер отверстия кольца 9 условно увеличен для обеспечения лучшей наглядности. Однако размер отверстия в кольце 9 может быть и больше. Механизм по первому варианту выполнения (фиг.5) также содержит неподвижные диски 3 и 4, на которые надеты шины 5 и б, которые также могут образовывать полости М. В отличие от предыдущего основного варианта механизма здесь вал помещен в направляющую втулку 17, которую охватывает подвижное кольцо 9. Роль кольца 9 (фиг. 5) совершенно анало гична его роли в основном механизме, но здесь кольцо не имеет конических поверхностей. Однако его функциональное назначение совершенно такое же. К кольцу 9 (фиг.5) прикреплены на штырях 14 (условно показан только один штырь 14) - ролики 10 и 11 (бло роликов). Блок роликов совершенно такой же, как и в основном механизме. Вал 1 охвачен по своей окружности плоскими пружинами 18, прикрепленными к направляющей втулке 17. Второй вариант механизма (фиг,6-7) включает также диски 3 и 4, несущие шины 5 и б, в отверстиях дисков 3 И 4 помещена направляющая втулка 17. Эта втулка имеет закрепленные на ее ободах (в верхнем и нижнем) шины, 19 и 20. B полости под эти шины (в полости N и N) подается сжатый воздух через коллектор или ниппели (на фигурах не показаны), Втулка 17 с шинами 19 и 20 охватывается шинами 5 и 6, Ко втулке 17 прикреплена также шина (манжета) 21, ббразующая полость S, К кольцу 9 также как в основном механизме прикреплен блок роликов 10 и 11, установленных на оси 12, и пружина 22. Последняя прижимает ,ролики 10 и 11 к дискам 3 и 4. Этот вариант устройства предназначен для сборки более сложной детали, например, вала 1 с головкой со втулкой 2. Третий вариант .(фиг.8) механизма содер ит один диск 3, на который одета шина 5, образущая с внутренней частью отверстия диска 3 полость М. В отверстие вставлен сопрягаемый вал 1, который находится внутри направляющей втулки 17. Втулка 17 охватывается подвижным кольцом (под вижное кольцо на фигуре не видно). подвижного кольца отходит язычок 23 (возможно два язычка - верхний и нижний относительно диска 3; на фиг. 8 показан только один верхний - язычок, нижний язычок сим метрично расположен относительно верхнего). В отверстиях язычкрй 23 установлена с возможностью вращения ось 12, на которой установлен также с возможностью вращения ролик 10. Ролик 10 прижимается, как и в предЫ дущих вариантах (см.фиг.1-7) к наружной стороне диска 3, но прижимается он не непосредственно к диску 3, а к.наружной шине (манжете) 24, прикрепленной к диску 3 снаружи Между шиной 24 и диском 3 образована полость м. Надуваемая воздухом полость М воздействует на ролик 10, заставляя его катиться по шине 24. Возможно сочетание конструкции по фиг. 5 с конструкцией по фиг. 8; на диски 3 и 4 надеваются наружные шины, подобные шине 24. Возможен вариант выполнения меха низма, заключающийся в том, диски 3 и 4 крепятся к основанию не жестко, а через упругие элементы, например, пружины. Таким образом, между дисками и основанием (опорой) имеется еще дополнительно упругая связь. Вследствие этого при перекатывании вала 1 (или втулки 17) центробежная сила, действующая на вал (так как вал и втулка 17 размещены в отверстиях дисков 3 и 4 эксцентрично) , вызывает радиальные виб рации дисков, т.е. траектория сканирующего вала 1 станет еще богаче, что улучшит условия сборки. Этот вариант на чертежах не иллюстри :руется. ,, Кроме того, возможен такой вариант, при котором направляющая в±улк.а (фиг.9) имеет наружную поверхность Некруглого поперечного сече- НИИ. Например, развертка поперечного сечения направляющей втулки 17 может иметь вид болнистой линии-синусоиды В дисках 3 и 4 выполнены отверсти 25 и 26 для подвода и отвода воздуха Работа основного сканирующего сбо рочного механизма (фиг. 1-4). Когда в механизме нет вала 1, то кольЙ1о 9 оттяг ивается пружинами 15 через тра версу 13, ось 12 и ролики 10 и 11 в такое положение, что конусные по« верхности кольца 9 соприкасаются с поверхностями П и П колец. 7 и 8. В этом случае кольцо 9 занимает положение несколько левее, чем то,что изображено на фиг.1.. Когда вал 1 проталкивается сверху толкателем (толкатель на фигурах не показан), то его нижний торец, скользя по верхней конусной поверхности кольца 9, отводит последнее вправо; Поэтому кольцо 9 прижимает своим центральным пояском вал 1 к шинам 5 и 6. Сила прижима вала 1 к шинам 5 и 6 зависит от силЫ .натяжения пружин 15 и может регулироваться. Вал 1, пройдя через отверстия в дисках 3 и 4 и шинах 5 и 6, упирается в верхний торец втулки 2, если между ними имеется смещение. Затем начинается сканирование валом 1 поверхности торца втулки 2, для чего через отверстия 25 в дисках 3 и 4 подается сжатый воздух под давлением Р под шины 5 и 6. При этом под шинами вследствие их деформации образуются полости М и М (фиг. 2 и 4). Поэтому на вал 1 начинает действовать крутящий момент; вращающий вал 1 по стрелке Т (фиг. 2 и 4). При этом вал 1, кольцо 9, штыри 14, ось 12 и блок роликов 10 и 11 играют роль своеобразной планетарной передачи, у которой солнечными шестернями являются . диски 3 и 4. При зтбм кольцо 9 вращается по стрелке F (фиг.. 3 и 4); вместе с кольцом 9 совершают движение штыри 14, траверса 13 и ось 12, а ролики 10 и 11 вращаются по стрелке D. Кольцо 9 и ролики 10 и 11 -нужны для того, чтобы прижимать вал 1 к шинам 5 и 6 (а значит, и к дискам 3 и 4) при обкатываний валом 1 внутренних поверхностей в шинах 5 и 6 по стрелке Т. В противном случае (если вал 1 не прижимать, к шинам), сжатый воздух из полостей М и м прорвется и вытечет через отверстия 26 в атмосферу. Тем самым будет задержано вращательное движение вала 1 во втулке 2, т.е. прекращено tro сканирование. Когда вал 1 в своём вращении пройдет над отверстием 26 в диске 3 (см.фиг.10) , то воздух из полости М. стравится в атмосферу. В этом случае момент вращения вала 1 станет равным нулю, и вал 1 остановится. Однако, в этом положении на вал 1 будет действовать момент со стороны шины 6, укрепленной на диске 4. Для достижения такого действия отверстия 25 и 26 в дисках 3 и 4 должны быть смещены друг относительно друга. Поэтому, когда перестанет действовать момент на вал со стороны шины 5, то будет ействовать момент со стороны шины , и наоборот. На некоторых участках о окружности дисков 3 и 4 действуют ба момента. Дополнительно увеличения ращающего момента можно достигнуть рименением двух сканирующих меха76ниэмов, разместив их друг над другом (этажное построение). Работа видоизмененного механизма по фиг, 5. Вал 1 проталкивается через отверстие в направляющей втулке 17 и фиксируется в ней пружинами 18. Толкателем (на фигуре не показан вал 1 прижимается к торцу втулки 2 с некоторой силой, обеспечивающей за ход вала в отверстие втулки при совмещении их осей. Затем в полости М шин 5 и 6 подае ся сжатый воздух,который заставляет втулку 17, а значит, и вал 1 обкатываться по внутренним поверхностям отверстий дисков 3 и 4 (т.е. по шина 5 и 6). В этом движении сканирующий вал 1 в некоторый момент времени проходит над отверстием втулки 2 и западает в него. Все движения втулки 17 и вала 1 (фиг.5) такие же, как и движение вала в основном механизме (фиг. 1-4) только в данном варианте движение валу 1 передается не непосредственно а через втулку 17. Роль кольца 9 и роликов 10 и 11 та же,что и раньше прижимать втулку 17 к шинам 5 и б при обкатывании втулки 17 по ним. Давления в полостях шин 5и 6 создают две сдвинутые по фазе бегущие волны - полости М в шинах, которых приводят к тому, что на втул ку- 17 непрерывно действует вращающий момент. Пружины 18 не только фиксируют вал 1, но и позволяют собирать со втулками 2 такие валы, у которых имеются головки (винты, болты), а также ступенчатые валики. При протал кивании такого вала вниз в отверстие втулки 2 пружины 18 деформируются, пропуская головку вала. Работа видоизмененного механизма по фиг. 6 и 7. Вал 1, имеющий головку, подается в отверстие направляющей втулки 17. При. этом шина 21 не надута и прилегает к стенкам отверстия втулки 17. Вал 1 упирается в торец втулки 2. Затем в полость S под шину 21 подается сжатый воздух, и она, раздувая охватывает вал 1. В полостях N и N шин 19.и 20 из быточное давление создается все вре мя. Изменение давления в полостях N и N приводит к.тому, что меняет расстояние L между осями собираемых деталей (т.е. расстояние между осью отверстий в дисках 3 и 4. и ось втулки 17). Увеличивая давление в полостях N и N, расстояние уменьшают и. наоборот. После того, как вал 1 захвачен втулко.й 17, подается сжатый воздух под шины 5 и б .(в полости М,см.фиг. Возникает момент, действующий на ши ны 19 и 20 и перемещающий через них на. втулку 17 и вал 1, которые начиают вращаться по стрелке Т, обкатывая поверхности отверстий .дисков 3 и 4, Ролики 10 и 11, соединенные через ось 12 и пружину 22 с подвижным кольцом 9,прижимает втулку 17 к стенкам отверстий в дисках 3 и 4 (к шинам 5 и б) при вращении втулки 17. Тем самым герметизируется полость М как в одной шине, так и во второй, объем которых при качении втулки 17 все Еремя меняется. Когда ось вала 1 совпадает с осью отверстия втулки 2, вал 1 под действием толкателя (толкатель на фигурах не показан) проходит в отверстие втулки, чем осуществляется сборка. При этом толкатель открывает золотник (не-показан) в схеме питания сжатым воздухом, и сжатый воздух из полостей М стравливается.Тем самым прекращается сканирующее вращение втулки 17 и вала 1. Одновременно выпускается воздух из полости S, и поэтому головка вала 1 свободно проходит через отверстие во втулке 17, так как шина 21 опять прилегает к стенкам отверстия втулки 17. Аналогичным образом осуществляется управление процессом сборки и в предыдущих вариантах. Работа видоизмененного механизма по фиг. 8. Сжатый воздух подается в полости М и м/ тем самым возбуждается не только момент, вращающий втулку 17, но и второй момент, вращающий ролик 10. Следовательно, на эту подвижную систему действуют два вращающих момента, что дополнительно интенсифицирует процесс сборки.Кроме ого, высота механизма существенно (в два раза) уменьшается за счет того, что исключается диск 4 и все элементы, сопрягающиеся с ним. Возможно также такое решение,когда к дискам 3 и 4 по фиг.5 (обоим дискам) добавляются наружные шины 24 (фиг.8). Работа разновидности механизма с видоизмененной направляющей втулкой показана на фиг.9. При своем движении по шинам 5 и б такая втулка 17 движется по более сложным траекториям, чем достигается более быстрая собираемость вала 1 со втулкой 2. Здесь траектория оси сканирующего вала представляет собой участки гипоциклоид, следующие один за другим. Вместо шин могут быть использованы гибкие шланги (рукава). Их работа ничем не отличается от работы механизмов, в которых используются шины, (манжеты). Отметим некоторые преимущества представленных механизмов. Преимущества механизма по фиг.5 состоят в том, что в нем можно осу- . ществлять сборку валов с головками. Отверстие во втулке 17 может быть ступенчатым, например при сборке коротких валов. В варианте механизма (фиг. 6 и 7) можно осуществлять большее количество регулировок: изменяя давление в полостях Ы и N, можно регулировать смещение -, и, значит, обеспечить лучлше условия сканирования, посколь ку здесь поиск отверстия валом 1 ведется как по окружности, так и по радиальным направлениям, К тому же вместо шины 21 могут быть применены, как в механизме по фиг.5, пружинные охватывающие эле менты (пружины 18). Формула изобретения 1. Сканирующий сборочный механизм для деталей типа вал-втулка,сорержащи диски для установки одной из деталей и привод, отлич ающи с я тем, что, с целью упрощения кон струкции с одновременным расширением технологических возможностей, на дис ках жестко смонтированы конусные кольца и эластичные шины, в дисках выполнены отверстия для подвода и отвода рабочей cpeды между дисками расположено с возможностью осевого перемещения кольцо, имеющее внутренние конусные поверхности, соответствующие поверхностям жестко установленных конусных колец, причем подвиж ное кольцо упруго сое,цинено с блоком роликов, предназначенных для обкатывания по наружной цилиндрической поверхности дискбв. 2.Механизм по п.1, о т л ичающийся тем, что на подвижном кольце смонтирована направляющая втулка с пластинчатыми пружинами, размещенными на ее внутренней поверхности, 3.Механизм по п.1 и 2, отличающийся тем,что на направляй)-щей втулке снаружи и внутри смонтированы эластичные шины. 4.Механизм -ПО п.п. 1-3,о т л ичающийся тем, что наружная поверхность направляющей втуЛки имеет волнообразный профиль, развертка которого представляет собой,например, синусоиду. 5.Механизм по п.1, отличающийся тем, что :эластичные шины смонтированы на наружных цилиндрических поверхностях дисков. 6.Механизм .по п,п,1-5,о т л ичающийся тем, .что в качестве эластичных шин использованы шланговые рукава. Источники информации, принятые во внимание при экспертизе 1,Яхимович В.А, Ориентирующие механизмы сборочных автоматов , Машиностроение, И,, 1975, с. 40-53. 2.Авторское свидетельство СССР ( 292748, кл, В 23 Р 19/04, 1974.
///)(///////
М
15
9
26
IS
4
8
16
18
,1
663551