Задача автоматического регулирования заключается в том, чтобы заставить некоторую характеризующую ход технологического процесса величину-параметр регулирования оставаться постоянной или меняться по определенному закону. Таким параметром регулирования могут быть температура, давление, скорость, удельный вес и т. д.
Эта цель достигается посредством воздействия на управляемые факторы, определяющие ход процесса.
Схема автоматического регулирования такова: величина параметра регулирования измеряется непрерывно или перибдически специальным прибором индикатором. При всяком отклонении параметра регулирования от заданного индикатор приводит в действие регулирующий , воздействующий в должном направлении. Это изменяет величину управляемого фактора, восстанавливая нарушенный ход процесса и приводя параметр регулирования к заданному значению.
Связь между индикатором и исполнительным механизмом осуществляется непосредственно или через промежуточное звено-передатчик.
В качестве индикатора может быть применен контактный гальванометр, потенциометр и т. п.
Кинематическая схема механизма такова, что в первый момент после вклю(157,)
чения его главный рычаг быстро перемещается на довольно значительную величину. Если в дальнейщем моторный механизм остается включенным, то nepejf мещение рычага продолжается в том же направлении, но уже значительно медленнее. После выключения механизма рычаг остается в прежнем положении. При следующем включении характер перемещения рычага зависит от направления включения. Если включение произошло в прежнем направлении, то и рычаг будет перемещаться в том же направлении, что и раньше с небольшой скоростью. Если, наоборот, включение произошло в обратном направлении, рычаг переместится на ту же величину, на которую произошло быстрое перемещение при прямом включении, а затем будет продолжать перемещаться медленно.
Такая характеристика обеспечивает, с одной стороны, быстрое выравнивание случайных резких колебаний режима регулируемой установки, с другой стороны, медленные и глубокие изменения режима также выравниваются, не выводя установку из регулирования.
Как величина быстрого регулирования, так и скорость медленного перемещения могут быть по желанию изменены.
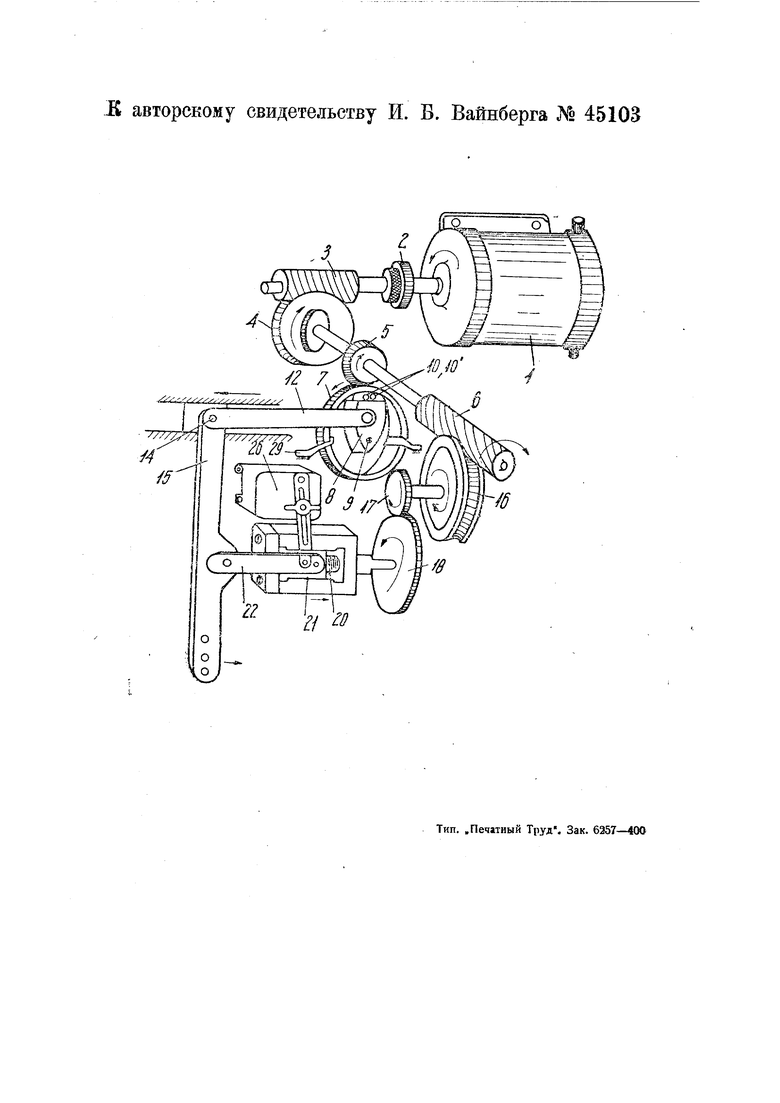
На чертеже изображен общий вид предлагаемого регулирующего механизма.
Предлагаемый механизм в отличие от механизма Броуна имеет один мотор и благодаря новой кинематической связи, состоящей из кулачка 8, двух роликов Ю и шестерни 7, выполняет функцию двухмоторного, т. е. дает резкое и плавное перемещение рычагу одновременно, а также делает независимым одно движение от другого.
Работа регулирующего механизма происходит следующим образом. Мотор 7 через эластичную муфту 2 приводит в движение червяк 3 и червячное колесо 4, на оси которого насажена щестеренка 5, приводящая в движение больщую шестерню 7, свободно вращающуюся вокруг оси 9 кулачка 8. Кулачок 8 имеет форму треугольника, причем между ободом колеса 7 и одной из плоскостей кулачка, как это видно на чертеже, расположены связанные между собою ролики W и /(.
При вращении шестерни 7, как это доказано на чертеже стрелкой, шестерня 7 увлекает за собой ролики и ролик JO заклинивается между кулачком 8 и ободом шестерни 7. Таким образом и кулачок 8 оказывается связанным с шестерней 7 и через тягу /2, ось которой на кулачке 8 посажена эксцентрично, подает конец коромысла 75 в сторону, указанную стрелкой до тех пор, пока шестерня 7 с роликами не упрется в упор 29, который, освободив
ролик 70, нарушит связь между шестерней 7, кулачком и коромыслом /5.
Описанная кинематическая цепь представляет собою цепь работы резкого перемещения рычага, которое у Броуна и в аналогичных приборах выполняется специальньтм мотором с предельным выключателем.
При дальнейшей работе мотора 7 червяк 6 через червячную шестерню J6 и передаточные щестерни 77, 78 приводит во вращение ходовой винт 20, вследствие чего гайка 27 получает поступательное движение, а с нею и рычаг 22 повернет коромысло 75 вокруг оси /4 в ту же сторону, что и грубое регулирование. Предельный выключатель 26 ограничивает плавное перемещение рычага 75.
Предмет изобретения.
Регулирующий механизм для грубой и точной регулировки, отличающийся тем, что для осуществления регулирования посредством только одного коромысла 75 применен кулачок 8, связанный с коромыслом 75 посредством тяги 72 и приводимый во вращение в период грубой регулировки роликами 70 и 70 способными заклиниваться в зазоре между внутренней поверхностью шестерни 7 и наружной поверхностью кулачка 8.