1
Изобретение относится к автоматике и предназначено для построения высокоточных следящих систем.
Известны устройства автоматического управления, содержащие последовательно соединенные датчик рассогласования, усилитель и отрабатывающий блок, замкнутые обратной связью, и генератор импульсов в параллельной корректирующей цепи.
Однако известные устройства сложны, точность их сравнительно невысока, а к стабильности коэффициентов передачи элементов и к их симметрии предъявляются жесткие требования.
Цель изобретения - повысить точность, упростить устройство и расширить область его применения.
Это достигается тем, что устройство автоматического управления содержит фиксатор, выход которого соединен со вторым входом усилителя, причем выход усилителя связан со входом фиксатора, а выход генератора импульсов подключен к управляющему входу фиксатора.
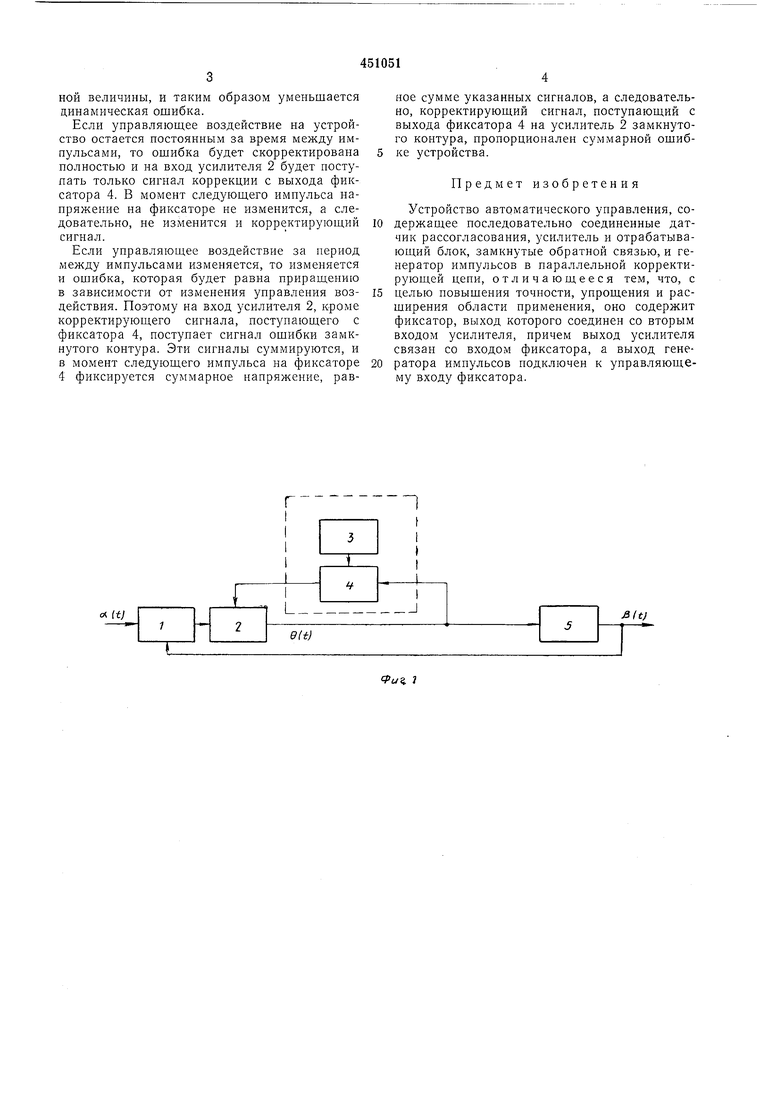
На фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг. 2 (а, б, в, г) - временные диаграммы, поясняюпше работу устройства.
Схема предлагаемого устройства содержит датчик рассогласования 1, усилитель 2, корректирующее устройство, состоящее из гене ратора импульсов 3 и фиксатора 4, и отраба тывающий блок 5.
Устройство работает следующим образом. На вход устройства подается задающее воздействие, например, в виде вращения вала датчика по закону a.(t). Датчик рассогласования 1 сравнивает задающий закон а (0 и закон на выходе регулируемой координаты
р(/), и разность этих законов в((0-Р(0 в виде напряжения рассогласования поступает на усилитель 2. Далее усилитель 2 управляет отрабатывающим устройством 5. Таким образом, закон на выходе устройства повторяет
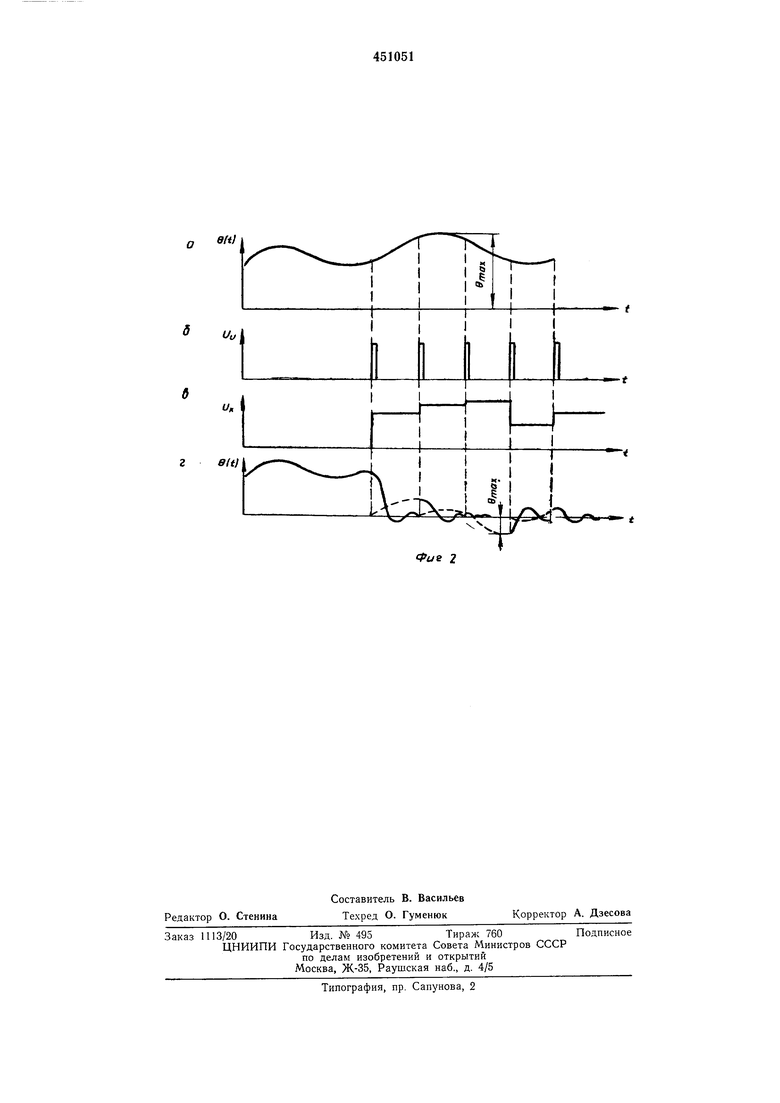
заданный закон на входе устройства с диналтической ошибкой в (t).
Коррекция динамической ошибки осуществляется следующим образом. Сигнал с выхода усилителя 2, пропорциональный динамической ошибке устройства в момент импульса, поступающего с генератора 3, фиксируется (запоминается) на фиксаторе 4. Зафиксированное напряжение, пропорциональное ошибке устройства, поступает на усилитель 2 и
суммируется с напряжением ошибки прямой цепи замкнутого контура. Под воздействием суммарного напряжения прямой цепи замкнутого контура и напряжения, поступающего с выхода фиксатора 4, отрабатывающее устройство 5 корректирует закон изменения выходной величины, и таким образом уменьшается динамическая ошибка.
Если уиравляюш,ее воздействие на устройство остается постоянным за время между импульсами, то ошибка будет скорректирована полностью и на вход усилителя 2 будет поступать только сигнал коррекции с выхода фиксатора 4. В момент следуюш,его импульса напряжение на фиксаторе не изменится, а следовательно, не изменится и корректирующий сигнал.
Если управляюш,ее воздействие за период между импульсами изменяется, то изменяется и ошибка, которая будет равна прираш;ени1О в зависимости от изменения управления воздействия. Поэтому на вход усилителя 2, кроме корректируюш,его сигнала, поступаюш,его с фиксатора 4, поступает сигнал ошибки замкнутого контура. Эти сигналы суммируются, и в момент следующего импульса на фиксаторе 4 фиксируется суммарное напряжение, равное сумме указанных сигналов, а следовательно, корректирующий сигнал, поступающий с выхода фиксатора 4 на усилитель 2 замкнутого контура, пропорпионален суммарной ошибке устройства.
Предмет изобретения
Устройство автоматического управления, содержащее последовательно соединенные датчик рассогласования, усилитель и отрабатывающий блок, замкнутые обратной связью, и генератор импульсов в параллельной корректирующей цепи, отличающееся тем, что, с целью повышения точности, упрощения и расширения области применения, оно содержит фиксатор, выход которого соединен со вторым входом усилителя, причем выход усилителя связан со входом фиксатора, а выход генератора импульсов подключен к управляющему входу фиксатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1975 |
|
SU739470A1 |
| Система автоматического управления | 1972 |
|
SU450131A1 |
| Система автоматического управления | 1974 |
|
SU556413A1 |
| Система управления | 1981 |
|
SU996991A1 |
| Устройство для автоматического управления | 1975 |
|
SU589588A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1971 |
|
SU317050A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |
Г
л
Фие 2
