Изобретение относится к автоматическому управлению и може быть испальэовано при построении высокоточных быстродействуюпдах следящих систем. . , , ; .
Известна система управления, содержащая последовательно соединенные датчик рассогла.со.вания, усилитель и отрабатывающий блок, замкнутые обратной связью с параллельной корректирующей цепью. Уменьшение динамической ошибки в такой системе достигается за счет порогового устройства и двух фиксаторов, включенных в параллельную корректирующую цепь. При достижении выходным сигналом усили- . теля заданной величины, срабатывает пороговое устройство, выход которого через формирователь импульсов подсоединен к двум фиксаторам, и разреша.ет их работу. В момент поступления импульса первый фиксатор фикси- . рует мгновенное знё1чение входного сигнсша усилителя, которое затем вычитается из текущего значения сигнала рассогласования, т.е каждый раз при достижении выходным сигналом усилителя порогрвогЬ значения, входной сигнал уменьшается в результате действия коррекции. Второй фиксатор
в момент импульса фиксирует мгновен ное значение выходного сигнала усилителя, которое затем суммируется с текущим значением выходного сигнала усилителя Ci3Однако в данной системе корректирунедая цепь содержит два фиксатора, для входной и выходной цепей усилителя,, что делает ее достаточно слож10
ной и снижает, точность работы.
Наиболее близкой по технической сущности к изобретению является система управления, содержащая по- следовательно соединенные датчик рас15согласования, вычитатель, усилитель, сумматор и отрабатывающее устройство, выход которого подключен к другому входу датчика рассогласования, и пороговое устройство, вход
20 которого соединен с выходом усили реля, а выход через формирователь им-, пульсов подключен первому входу фиксатора, второй вход которого соединен с входом отрабатывающего уст25 ройства, а выход подцключен к второму входу сумматора 2.
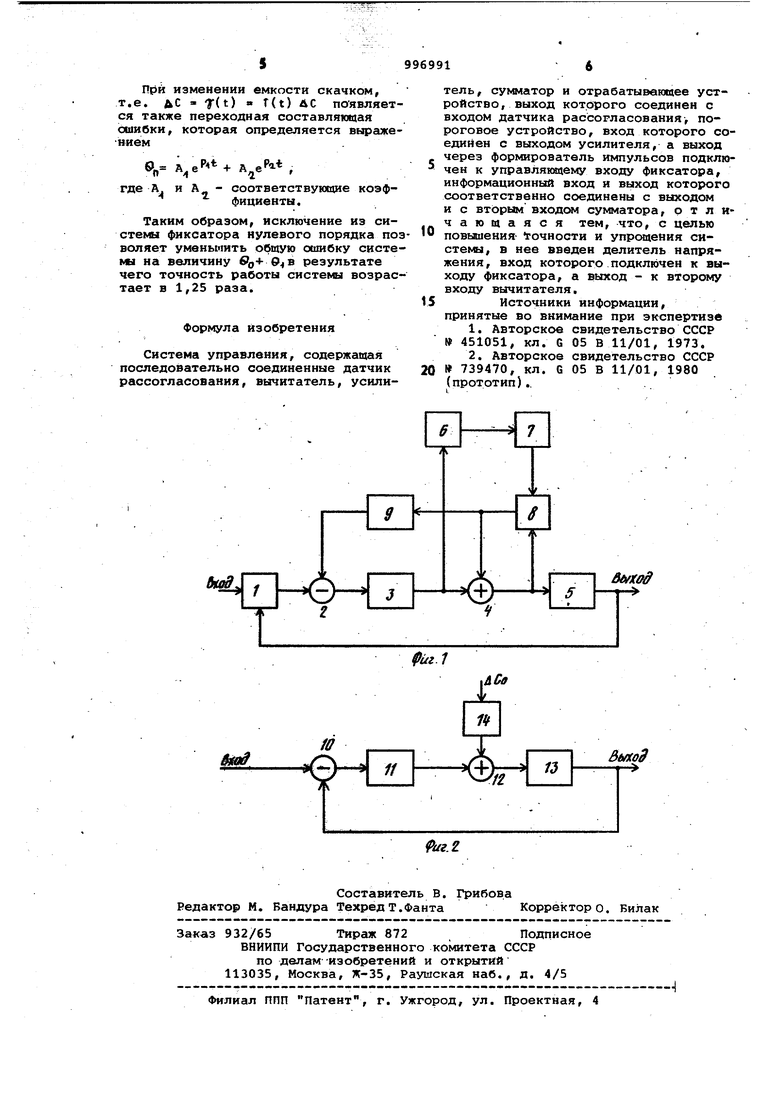
Недостатком известной системы является сложная корректирующая / цепь, вносящая дополнительную ность и снижающая точность работы. Цель изобретения - повышение точ нести и упрощение системы. Эта цель достигается тем, что в систему управления, содержащую последовательно соединенные датчик рассогласования, вычит.атель, усилиталь, сумматор и отрабатывающее устройство, выход которого соединен с входом датчика рассогласования, пороговое устройство, вход которого соединен с выходом усилителя, а выход через формирователь импульсов подключен к управляющему входу фикса тора, информационный вход и выход которого соответственно соединены с выходом и с вторым входом сумматора, введен делитель напряжения, вход которого подключен к выходу Фиксатора , а выход - к второму входу вычитателя. На фиг. 1 приведена структурная схема предлагаемой системы управления,- на фиг. 2 - ее функциональная схема,. Система содержит датчик рассогласования 1, вычитатель 2, усилитель 3 сумматор 4,, отрабатывающее устройство 5, пороговое устройство б, формирователь импульсов 7, фиксатор 8, делитель напряжения 9, вычитатель 10 усилительное звено 11, сумматор 12, отрабатывающее звено 13, звено передачи возмущения 14. На датчике рассогласования .1 сравниваются текущие значения входного и выходного сигналов. При наличии рассогласования между ними на выходе датчика рассогласования появляется сигнал, пропорциональный величине рассогласования, ко горый. усиливается усилителем 3 и подается по прямой цепи на отрабатывающее устрой ство 5, которое уменьшает возникшее рассогласование. При достижении выходным сигналом уси лителя 3 заданной величины, соответствующей предельному значению линейного участка усилителя, срабатывает пороговое устройство 6, которое разрешает работу формирователю .импульсов 7, вырабатывающему серию импульсов. Фиксатор 8 представляет собой фик сатор нулевого порядка. В момент поступления на его первый вход импульса от формирователя импульсов 7, он запоминает мгновенное значение выход ного сигнала усилителя 3, поступающее на его второй вход, и сохраняет его до поступления следующего импульса. Зафиксированное значение выходного сигнала усилителя 3 через делитель напряжения 9 с коэффициентом деления, равным коэффициенту усиления К усилителя 3, поступает на второй вход вычитателя 2, где вычитается из текущего значения сигнала рассогласования, а также на второй вход сумматора 4, где су Фгаруется с текущим значением выходного сигнала усилителя 3. Следовательно, в момент поступления на.фиксатор 8 импульса, входной сигнал усилителя 3, уменьшается на величину Сигнала, зафиксированного на фиксаторе 8 и уменьшенного в К раз, а текущее значение выходного сигнала усилителя 3 суммируется с сигналом, зафиксированнам на фиксаторе 8. Таким образом, усилитель работает без захода в насыщение. Исключение из системы управления одного фиксатора и сумматора позволяет избавиться от ошибки, вносимой этими узлами, что повышает точность работы системы в целом. Учитывая, что введенный в систему делитель напряжения построен на базе усилителя постоянного тока, но вносимая им погрешность эквивалентна погрешности исключенного из системы сумматора, имеющего такую же структуру. Поэтому точность работы системы повышается лишь за с.чет исключения фиксатора. Поскольку фиксатор нулевого порядка представляет собой емкостную цепь, то величина вносимой им погрешности зависит как от постоянной времени заряда и разряда, так и от величины паразитных сопротивлений, вызывающих разряд емкости в интервале между импульсами. Для оценки величины погрешности, вносимой фиксатором, рассмотрим функциональную схему системы управления (фиг. 2). Сигнал, пропорциональный изменению емкости фиксатораДСо, прикладывается к системе в виде возмущения Д Cfjy, где 7 передаточная функция 3венa jiepeдачи возмущения-14. Это возмущение вызывает установившуюся и переходную составляющую ошибки. Пусть передаточные функции звеньев системы имеют вид; усилительного звена 11 WX,(P) Кд, отрабатывающего звена 13 (Тр+1)Р -I- к, где К КК - коэффициент усиления всей цепи, К Т - коэффициент передачи и постоянная времени отрабатывающего звена. Тогда изображение ошибки имеет вид тр- -ь Р -f Kj в установившемся состоянии при t -400 , Р - О и ошибка равна
При изменении емкости скачком, т.е. дС Y(t) t(t) AC появляется также переходная составляющая ошибки, которая определяется В1фажением
где А и А - соответствующие коэффициенты.
Таким образом, исключение из системы фиксатора нулевого порядка позволяет уменьшить общую оошбку системы на величину &о+ результате чего точность работы системы возрастает в 1,25 раза.
Формула изобретения
Система управления, содержащая последовательно соединенные датчик рассогласования, вычитатель, усилитель, сумматор и отрабатывающее устройство, выход которого соединен с входом датчика рассогласования, пороговое устройство, вход которого соединен с выходом усилителя, а выход через формирователь импульсов подключен к управляющему входу фиксатора, информационный вход и выход которого соответственно соединены с выходом и с вторым входе сумматора, отличающаяся тем, что, с целью
0 повьдиения- точности и упрснцения системы, в нее введен делитель напряжения, вход которого подключен к выходу фиксатора, а выход - к второму входу вычитателя.
5
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 451051, кл. G 05 В 11/01, 1973.
2.Авторское свидетельство СССР 739470, кл. G 05 В 11/01, 1980
0 (прототип)...
duff.
бб/Xt
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1975 |
|
SU739470A1 |
| Устройство для автоматического регулирования скорости прессования на гидравлических прессах с дроссельным управлением | 1985 |
|
SU1263550A1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Следящая система | 1986 |
|
SU1427327A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| Система автоматического управления | 1974 |
|
SU556413A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МОМЕНТА НАЧАЛА ЗАЛИВКИ ЧУГУНА В МАРТЕНОВСКУЮ ПЕЧЬ | 1993 |
|
RU2048532C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
W
АСа
