(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1986 |
|
SU1427327A1 |
| Устройство для управления регулируемым мостовым инвертором | 1988 |
|
SU1548830A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Система автоматического управления | 1974 |
|
SU556413A1 |
| Устройство автоматического управления | 1973 |
|
SU451051A1 |
| Система управления | 1976 |
|
SU714350A1 |
| Следящая система | 1978 |
|
SU752224A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
1
Изобретение относится к области автоматики и может найти широкое применение в системах автоматического управления.
Известны устройства для автоматического управления, содержащие датчики, усилители, исполнительные элементы, генераторы импульсов, ключи, сумматоры fl .
Недостатком этих устройств является низкая точность их работы в переходном режиме.
Наиболее близким к предлагаемому изобретению является устройство, содержащее последовательно соединенные датчик, усилитель, исполнительный элемент, выход которого подключен к входу датчика, генератор тактовых импульсов и ключ 2.
Недостатками известного устройства являются небольшая точность работы . устройства в переходном режиме, а также уменьшение точности работы устройства в случае возникновения в нем колебаний, обусловленных наличием нелинейных элементов (люфт, зона нечувствительности и дрО или при воздействии случайных помех на устройство.
Целью изобретения является повышение точности устройства.
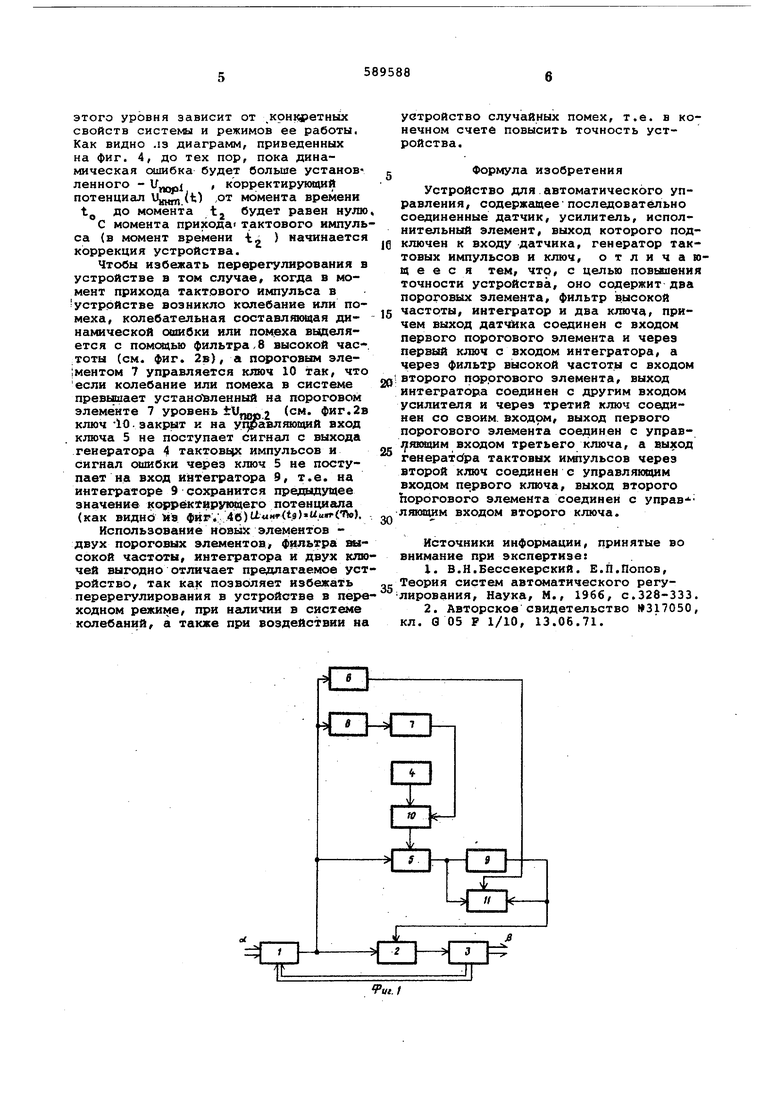
Сущность изобретения заключается в том, что устройство для автоматического управления содержит два пороговых элемента, фильтр высокой частоты, интегратор и.два ключа, причем выход датчика соединен с входом первого порогового элемента и через первый ключ с входом интегратора, а через фильтр высокой частоты с входом второго порогового элемента, выход интегратора соединен с другим входом усилителя и через третий ключ соединен со своим входом, выход первого порогового элемента соединен с управляющим входом третьего ключа, а выход генератора тактовых импульсов через второй ключ соединен с управляющим входом первого ключа, выход второго порогового элемента соединен с управляющим входом второго ключа.
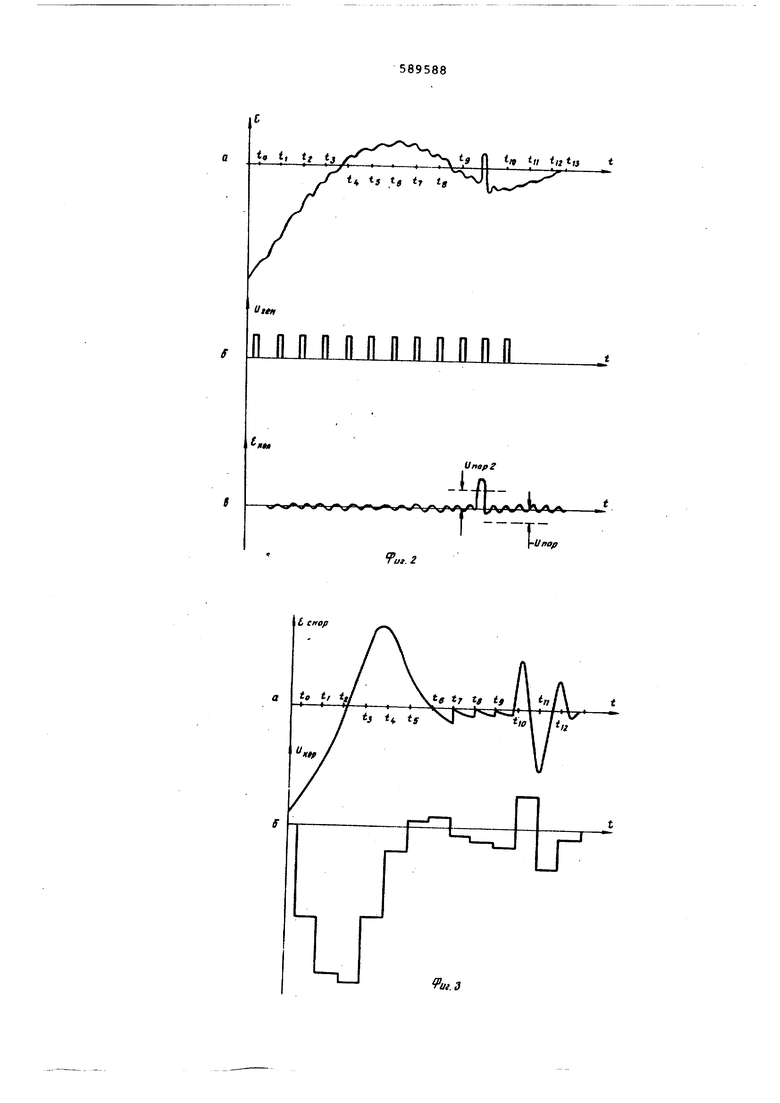
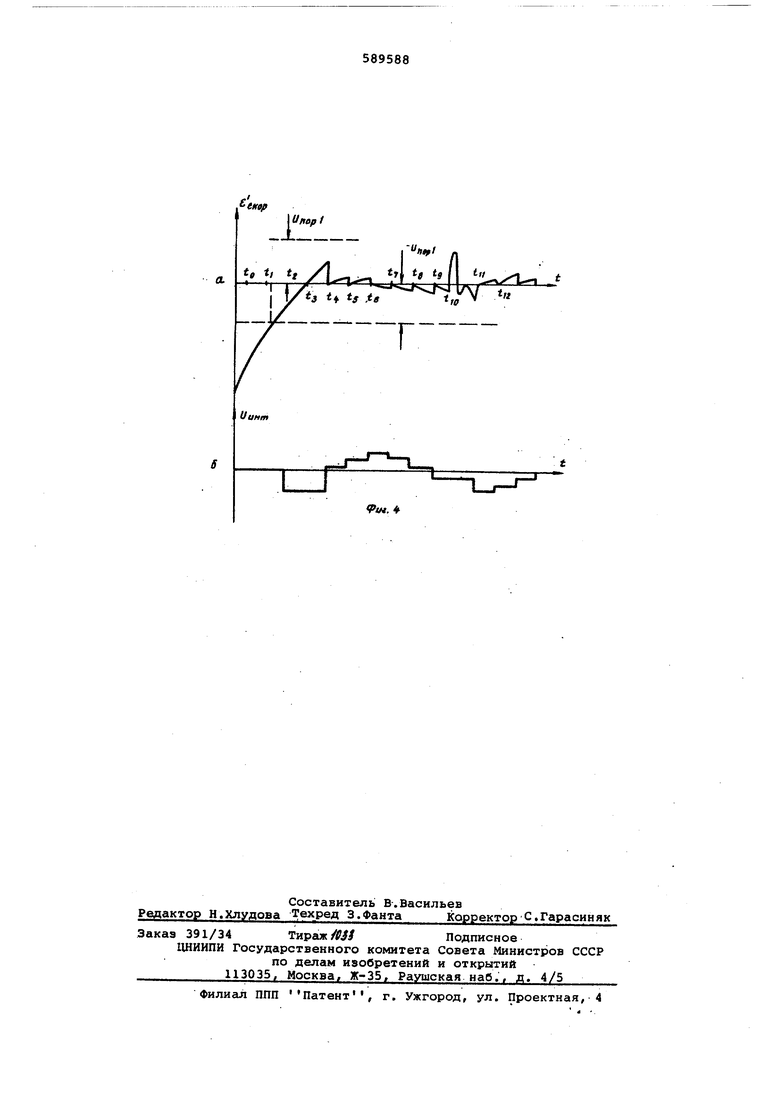
На фиг. 1 изображена блок-схема предлагаемого устройства на фиг. 2а диаграмма кривой динамической ошибки устройства (t) } на фиг. 26 - диаграмма выходного напряжения генератора тактовых импульсов Uy«(t) / на фиг. 2в - диаграмма кривой колебательной составляющей динамической ошибкиЕ); на фиг. За - диаграмма кривой динамической сялибки известного устройства (t) ; на фиг. 36 - диаграмма крив корректирующего потенциала на накопи тельном элементе известного устройст ва .t ; на фиг. 4а - диаграмма кр вой динамической ошибки предлагаемого устройства e(,.j(,p(t) ; на фиг. 46 диаграмма кривой корректирующего потенциала на интеграторе предлагаемог устройства и„нт(. Устройство для автоматического управления содержит последовательно соединенные датчик 1, усилитель 2, исполнительный элемент 3, замкнутые обратной связью, генератор 4 тактовых импульсов, первый ключ 5, -первый пороговый элемент б, второй пороговый элемент 7, фильтр 8 высокой частоты, интегратор 9, второй ключ 10, третий ключ 11, причем выход датчика 1 соединен с входом порогового элемента 6 и через ключ 5 с входом интегратора 9, а через фильтр высокбй частоты 8 с входом порогового элемента 7, выход интегратора 9 соединен с другим входом усилителя 2 и через ключ 11 соединен со своим входом выход порогового элемента б соединен с управляющим входом ключа 11, а выход генератора тактовых импульсов 4 через ключ 10 соединен с управляющим входом ключа 5, выход порогового элемента 7 соединен с управляющим входом ключа 10. Рассмотрим работу устройства для автоматического управления, изображе ного на фиг. 1. На вход устройства подается задающее воздействие, например: в виде -вращения вала датчика по закону oC/t)/ . Датчик 1 сравнивает задающий закон о(.(-Ь) и закон на выходе система b(t) и разница этих законов E{t)olft)- Jb(t) в виде напряжения рассогласования с датчика 1 поступает на усилитель 2. Сигнал G выхода усилителя 2 поступает на исполнительный элемент 3. 7аким образом, закон на выход устройства повторяет задающий закон с динаьической сшибкой; {i) /(см.фиг.2а Для уменьшения динагдаческой сяаибки алужит параллельное корректирующее звено, вьшолнениое в виде дискрет ного накопителя, состоящего из t-eHeратора 4 тактовых импульсов, ключа 5 и интегратора 9. В качестве накопительного элемента используется интегратор. Коррекция динамической ооибкИ в устройстве для автоматического управления осуществляется следующим образом. СигнёШ с датчика 1, пропорциональный динамической сшибке устройства, через ключ 5 поступает на ин тегратор 9. На управляквдий вход ключа 5 через ключ 10 с генератора 4 тактовыхимпульсов поступают импульсы tL...,(t) (см. фиг. 26). В момент прихода импульса с генератора 4 тактовых импульсов ключ 5 открыт и пропускает сигнал ошибки C(t) на вход интегратора 9. Период генератора 4 тактовых импульсов устанавливают равным или больше длительности переходного процесса устройства. Таким образом на интеграторе 9 происходит накопление динамической сшибки с частотой, определяемой частотой генератора 4 тактовых импульсов. Выходное напряжение интегратора 9, пропорциональное суммарной динамической ошибке, поступает на вход усилителя 2 и под воздействием этого напряжения исполнительный элемент 3 корректирует закон изменения выходной величины, и таким образом уменьшается динамическая ошибка. Устройство в переходном режиме может находиться в режиме насыцения длительный промежуток времени, и в известном устройстве на накопительном элементе .выходное напряжение Цц,(4); (см. фиг. 36), пропорциональное суммарной динамической ошибке, может достичь значительного уровня. И хотя в устройстве в момент прихода тактового импульса (момент ;врет«ени; t, на фиг. За) ошибка e(t) уже измег нила свдй знак, на накопительном элегменте корректирующий потенциал U, сохранит свой знак, а это, в свою очередь, приведет к перерегулированию в устройстве, т.е. ,к резкому увеличению ошибки сков .от. момента времени tj до tj, (см.фиг.За). Перерегулирование в. устройстве может возникнуть и в том случае, когда в момент прихода тактового .импульса (например, момент времени t на фиг.2а) в устройстве возникло колебание или на систему подействовала случайная кратковременная помеха. В этом случае накопительиьЛ элемент в момент времени просуммирует это случайное колебание с накопленной ошибкой от момента времени t|D до tj, (см. фиг. 36). и на уст ройство будет воздействовать потенциanOjy Ctjj- t,jj), , которая приведет к перерегулированию в устройстве,, т.е. к резкому увеличению ошибки f от момента времени t.- до t,- (см. фиг. За). . Чтобы избежать перерегулирования в переходном процессе, в устройство введен пороговый элемент б, который в том случае, когда величина ошибки ревышает заранее установленный nopoi (см. фиг. 4а), залыкает через ключ 11 вход и выход интегратора 9. этом случае корректирующий потениал будет равен нулю до тех пор, ока величина ошибки не станет менье установленного уровня. Величииа этого уровня зависит от .крнруретных свойств системы и режимов ее работы, Как видно .13 диаграмм, приведенных на фиг. 4, до тех пор, пока динамическая ся1Шбка будет больше установленного - и. корректирующий . потенциал Uinen.vt) ,от момента времени 1д до момента tj будет равен нулю С момента прихода тактового импуль са (в момент времени i ) начинается коррекция устройства. Чтобы избежать перерегулирования в устройстве в том случае, когда в момент прихода тактового импульса в устройстве возникло колебание или помеха, колебательная составляющая динамической ошибки или пом.еха вьюеля- ется с помощью фильтра.8 высокой частоты (см. фиг. 2в), а пороговым эле|ментом 7 управляется ключ 10 так, что если колебание или помеха в системе превьшает устаноВленный на пороговом элементе 7 уровень tUniM)2 Фиг.2в ключ 10. закрыт и на ут авляюнщй вход ключа 5 не поступает сигнал с выхода генератора 4 тактовцх импульсов и сигнал ошибки через ключ 5 ие поступает иа вход интегратора 9, т.е. на интеграторе 9 сохранится предыдущее значение корректирующего потенциала (как видно Я8 фйр.: 4e) Использование иовых элементов двух пороговых элементов фильтра: аясокой частоты, интегратора и двух клю чей выгодно отличает предлагаемое уст ройство, так как позволяет избежать перерегулирования в устройстве в пере ходном режиме, при наличии в системе колебаний, а также при воздействии на устройство случайных помех, т.е. а конечном счете повысить точность устройства. Формула изобретения Устройство для автоматического управления, содержгицее последовательно соединенные датчик, усилитель, исполнительный элемент, выход которого подключен к входу датчика, генератор тактовых импульсов и ключ, отличающееся тем, что, с целью повьвиения точности устройства, оно содержит два пороговых элемента, фильтр высокой частоты, интегратор и два ключа, причем выход соединен с входом первого порогового элемента и через первый ключ с входом интегратора, а через фильтр высокой частоты с входом второго порогового элемента, выход интегратора соединен с другим входом усилителя и через третий ключ соединен со своим, входом, выход первого порогового элемента соединен с управjjtHBffitHM входом третьего ключа, а выход reaepaTdpa тактовых икшульсов через второй ключ соединен с управлякпщм входом первого ключа, выход второго Ьорогового элемента соединен с управляющим входом второго ключа. Источники информации, принятые во внимание при экспертизе: 1.В.Н.Бессекерский. Б.П.Попов, Теория систем автоматического регулирования. Наука, М., 1966, с.328-333. 2.Авторское свидетельство №317050, кл. G 05 Р 1/10, 13.06.71.
п
io t, tt tj
П flnO on fl n ПППП
.
L спор
19 // « W
.
f-tnep
Unai, I
t, t, tt
