(54) СИСТЕМА УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1981 |
|
SU996991A1 |
| Система автоматического управления | 1974 |
|
SU556413A1 |
| Следящая система | 1990 |
|
SU1829024A1 |
| Следящая система | 1990 |
|
SU1833831A1 |
| Следящая система | 1978 |
|
SU711538A1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
| Следящая система | 1990 |
|
SU1829023A1 |
| Устройство автоматического управления | 1973 |
|
SU451051A1 |
| Система управления | 1976 |
|
SU714350A1 |
| Двухканальная следящая система | 1974 |
|
SU487375A1 |
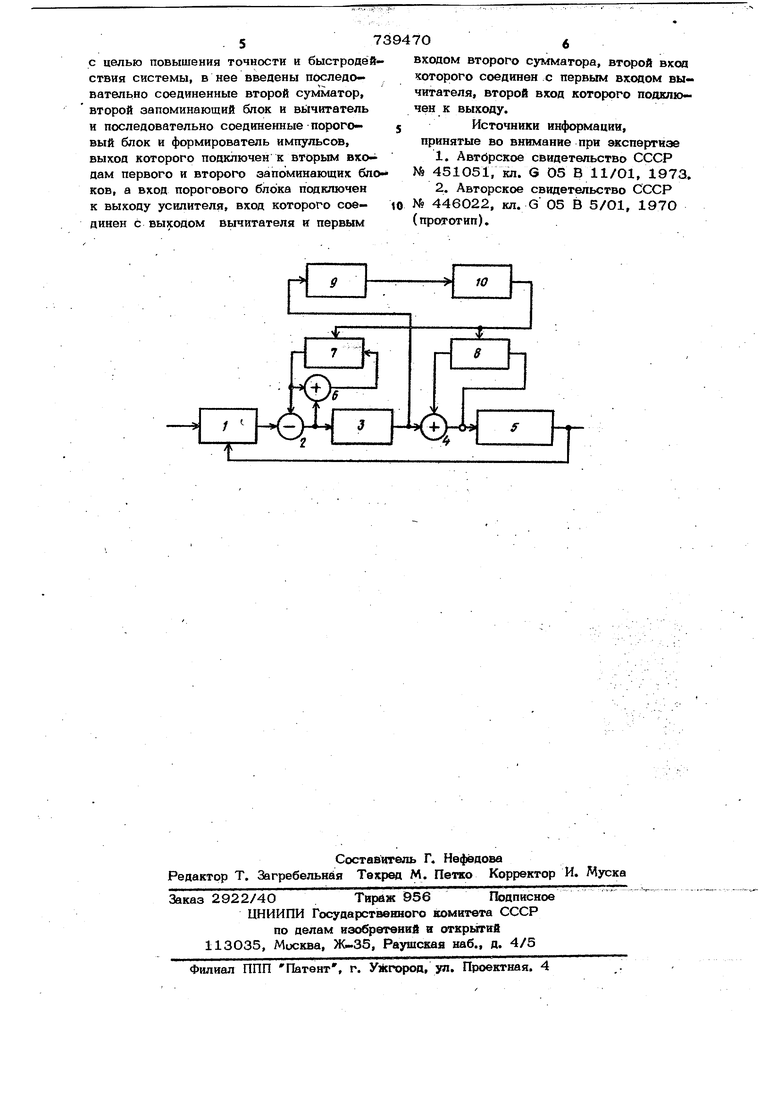
Изобретение относится к области авгоматического управления и сможет найти широкое применение для построения высокоточных быстродействующик следящих систем. Известна система автоматического управления, содержащая последовательно соединенные датчики рассогласования, усилитель и отрабатывающий блок, замкнутые обратной связью, и фиксатор в параллельной корректирующей цепи i . В этой системе для уменьшения динамической ошибки служит фиксатор, включенный в параллельную корректирующую цепь С 1гнал с выхода усилителя, пропорциональный динамической ошибке системы в момент импульса, поступающего с генера тора, фиксируется. Зафиксированное напря жение,, пропорциональное ошибке устройства, поступает на усилитель и суммируется с напряжением ошибки прямой цепи замкнутого контура. Под воздействием суммарного напряжения прямой цепи замкнутого контура и напряжения, поступающего с выхода фиксатора, отрабатывающее устройство корректирует закон изменения выходной величины, таким образом уменьшается динамическая ошибка. В этой системе корректирующее устройство служит для коррекции установившейся динамической ошибки и не предназначе- но для компенсации нелинейности, дрейфа и повышения быстродействия,что является недостатком этой системы. Наиболее близким по технической сущности к данной системе является система управления, содержащая последовательно соединенные усилитель, первый сумматор и формирователь управляющего сигнала, выход которого подключен ко входу датчика рассогласования, и первый запоминающий блок, вход и выход которого подсоединен соответственно к выходу и второму входу первого сумматора f2 . Недостатками ее являются низкие точность и быстродействие. Цель иаобретени - повышение точности и быстродействия системы, т. е. расширение ее области применения. Это достигается за счет того, что в системе управления введены последовательно соединенные второй сумматор, вто рой запоминающий блок и вычитатель и последовательно соединенные пороговый блок и формирователь импульсов, выход которого подключен к вторым входам перво го ивторого запоминающихблоков, а вход порогового блока подключен к выходу усилителя., вход которого соединен с выходом вычитателя и первым входом второго сумматора, второй вход которого соединен с первым входом вычитателя, второй вход которого подключен к выходу. На чертеже приведена бльк-схема предлагаемой системы автоматического управления. Система содержит последовательно соединенные датчик 1 рассогласования, вь1читатель 2, усилитель 3, сумматор 4 отрабатывающее устройство 5 и корректирующее устройство в параллельной кор ректирующей цепи, содержащее сумматор 6, фиксаторы 7, 8, пороговое устройство 9, формирователь 1О импульсов. При поступлении на вход системы управляющего сигнала с выхода датчика 1 рассогласования через вычитатель 2, , усилитель 3, сумматор 4 на вход отра- батывающего устройства 5 поступает сигнал, под действием которого отрабатывающее Устройство отрабатывает заданную величину. При увеличении момента нагрузки на выходе отрабатывающего устройства или при скачке управляющего воздействия сигнал рассогласования увеличивается, и усилитель входит в зону насыщения, что приводит к нелинейным искажениям при прохождении сигнала через интегрирующие звенья усилителя и отрабатывающего устройства, а также к уменьшению быстродействия известной системы. Предложенная система работает следующим образом. При достижении выходньш сигналом усилителя 3 заданной ве.личины срабаты вает пороговое устройство 9, выход которого через формирователь 10 импульсов подсоединен к двум фиксаторам 7 ив Фиксатор 7 в момент импульса фиксирует входной сигнал усилителя 3. за фикстфованное значение входного сигнал 04 поступает на второй вход вычитателя 2 и вычитается из текущего значения сигнала рассогласования, следовательно каждый раз при достижении выходным сигналом усилителя 3 заданного значения входной, сигнал усилителя будет суммироваться с предварительно зафиксированным сигналом, а зафиксированный суммарный сигнал будет вычитаться из те-. кущего значения сигнала рассогласования. Усилитель будет работать только в линейной зоне и не .будет входить в зону насыщения. Фиксатор 8 в момент импульса фиксирует выходной сигнал усилителя, который через сумматор 4 поступает на вход фиксатора 8. Зафиксированное значение выходного сигнала усилителя системы поступает на второй вход сумматора 4 и суммируется с т экущим значением выходного сигнала усилителя, следовательно каждый раз при достижении выходным сигналом усилителя 3 заданного значения суммарный сигнал, равный сумме текущего значения выходного сигнала усилителя и предварительно зафиксированного значения , фиксируется, а на выходе сумматора будет сигнал, линейная зона которого будет определяться питающим напряжением сумматора. Следовательно, на выходе cyMMiaTopa 4 получается сигнал, равный сумме зафиксированных и просуммировайных значений выходного сигнала усилителя при достижении им заданной величины и текущего сигнала усилителя. Коррекция нелйнейностей типа н сыщения позволяет значительно улучшить качественные показатели системы. Таким образом, предложенная система автоматического управления обеспечива- QT нрвьге качественные показатели следящих систем за счет возможности компенсации ошибок, а также повышения быстродействия, что значительно расширяет область ее применения. Формула изобретения Система управления, содержащая последовательно соединенные усилитель, первый сумматор и формирователь управляющего сигнала, выход которого подключен к входу датчика рассогласования и первый запоминающий блок, вход и выход которого подсоединены сдответственно к выходу и второму входу первого сумматора, отличающаяся тем, что. 57 с целью повышения точности и быстродействия системы, в нее введены последовательно соединенные второй сумматор, второй запоминающий блок и вЫчитатель и последовательно соединенные пороговый блок и формирователь импульсов, выход которого подключен к вторым входам первого и второго запоминающих блоков, а вход порогового блока подключен к выходу усилителя, вход которого соединен с выходом вычитателя и первым
D
1 70 входом второго сумматора, второй вход которого соединен с первым входом вычитателя, второй вход которого подклх чен к выходу. Источники информации, принятые во внимание при экспертизе 1.АвтЬрское свидетельство СССР № 451О51, кл. G 05 В 11/О1, 1973. 2.Авторское свидетельство СССР 446022, кл. G 05 В 5/01, 1970 (прототип)
