1
Изобретение относится к система-м азтома.тического управления и используется для обнаружения внезапных отказов датчиков и определения отказавшего датчика в информационных и управляющих системах.
Известно устройство для обнаружения отказов датчиков углового положения, содержащее дублированные датчики углового положения, преобразователи, выходы которых подключены к входам схем вычитания, а выходы схем вычитания подключены к входам схем сравнения, выходы последних подключены к логической схеме. Это устройство не обеспечивает необходимой достоверности обнаружения внезапных отказов датчиков, а при некоторых ситуациях может выдавать ложные отказы.
Для повыщения достоверности обнаружения внезапных отказов датчиков в устройство дополнительно введены датчик угловой скорости, соединенный через соответствующий преобразователь с входом дополнительно введенной схемы управления, схема выделения среднего арифметического значения датчиков углового положения и запоминающее устройство, причем выход схемы управления соединен с управляющим входом, а выход схемы выделения среднего арифметического значения сигналов датчиков углового положения - с сигнальным входом запоминающего устройства, подключенного к схемам вычитания.
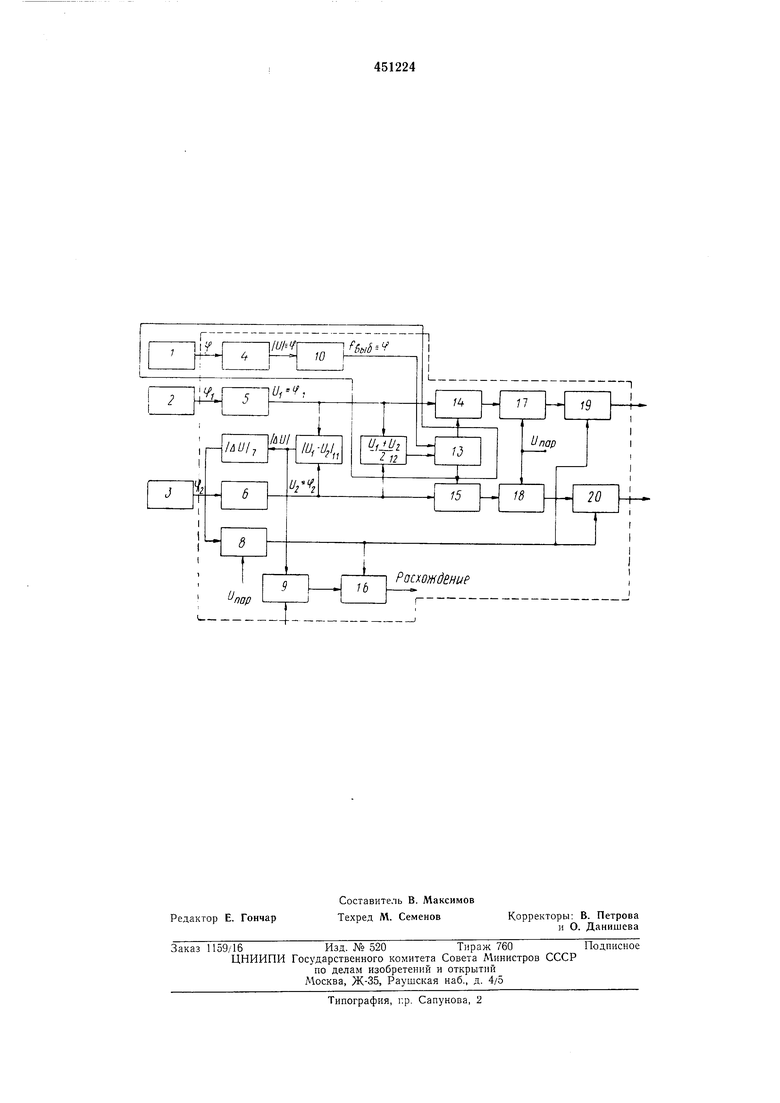
На чертеже представлена функциональная схема описываемого устройства.
Устройство содержит датчик угловой скорости I, датчики углового положения 2-3,
преобразователи 4-6, схему 7 определения скорости изменения разности напряжения, компараторы 8 и 9 схем сравнения, схему управления 10, схему вычитания И, схему 12 нахождения среднеарифметического значения
нормализованных сигналов датчиков положения, запоминающее устройство 13, схемы вычитания 14 и 15, схему разрешения 16, компараторы 17 и 18 схем вычитания, схемы запрета 19 и 20. Преобразователи 5 и 6 нормализуют сигналы датчиков положения 2 и 3 таким образом, что напряжения на выходах преобразователей пропорциональны напряжениям датчиков положения и не зависят от различных дестабилизирующих факторов (изменения напряжения питания датчика и пр.). Схема 12 определяет среднеарифметическое значение напряжений сигналов датчиков, которые запоминаются устройством 13 и подаются на вычитающие устройства 14 и 15. На
эти же вычитающие устройства одновременно подаются нормализованные сигналы датчиков положения. Разностные сигналы с выходов вычитающих устройств 14 и 15 поступают на сигнальные входы амплитудных компараторов
17 и 18, на вторые входы которых подается
опорное напряжение t/nopor, соответствующее допустимой величине расхождения сигналов датчиков от величины среднеарифметического значения.
При согласованной работе датчиков их нормализованные напряжения f/i и U равны
t/l + f/2г 7г 7
между собой, следовательно,-- Ui ,
а разностные напряжения схем вычитания 14 и 15 равны нулю. Компараторы 17 и 18 находятся в исходном состоянии. Запоминающее устройство 13 работает в режиме выборки (воспроизведение - фиксация), т. е. по сигналам схемы управления 10 оно запоминает среднее арифметическое значение напряжения на время, определяемое величиной угловой скорости объекта.
При УГЛОВОЙ скорости ф 0 время запоминания максимальное; при увеличении угловой скорости частота выборки тоже увеличивается, следовательно, время запоминания уменьщается. Это необходимо для уменьшения ощибки, вызванной величиной изменения сигнала датчика при больщих угловых скоростях.
При внезапном «быстром отказе одного из датчиков (обрыв любой из обмоток, короткое замыкание, «быстрый уход и пр.) например датчика I, напряжение на входе схемы вычитания 14 изменится скачком, а напряжение на выходе запоминающего устройства еще не успеет измениться, так как оно «помнит предыдущее значение целый такт до прихода следующего управляющего импульса. Поэтому на выходе схемы вычитания 14 напряжение будет отлично от нуля, компаратор 17 изменит свое состояние и выдаст сигнал отказа Д1.
При постепенных «медленных отказах, вызванных, например, увеличением трения,
разбалансировкой и пр., скорость изменения разностного ( напряжения (ДС/) будет незначительна и при значении, меньшем определенной величины, изменит свое состояние компаратор 8 и во избежание выдачи ложного сигнала отказа включит схемы запрета 19 и 20, а также схему разрешения 16. При превышении разностным напряжением допустимой величины изменит свое состояние компаратор 9 и выдаст сигнал «Расхождение, сигнализирующий о том, что один из датчиков неисправен, без указания неисправного датчика.
Пред-мет изобретения
Устройство для обнаружения отказов датчиков углового положения, содержащее дублированные датчики углового положения, преобразователи, выходы которых подключены к входам схем вычитания, а выходы схем вычитания подключены к входам схем сравнения, выходы которых подключены к логической схеме, отличающееся тем, что, с целью повышения достоверности обнаружения внезапных отказов датчиков, в него дополнительно введены датчик угловой скорости, соединенный через соответствующий преобразователь с входом дополнительно введенной схемы управления, схема выделения среднего арифметического значения датчиков углового положения и запоминающее устройство, причем выход схемы управления соединен с управляющим входом, а выход схемы выделения среднего арифметического значения сигналов датчиков углового положения - с сигнальным входом запоминающего устройства, подключенного к схемам вычитания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТА | 1994 |
|
RU2103718C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СИСТЕМЫ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265876C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЗЕРВИРОВАННОЙ С ВЫБОРОМ СРЕДНЕГО АРИФМЕТИЧЕСКОГО ЗНАЧЕНИЯ ВЫХОДНЫХ ПАРАМЕТРОВ СИСТЕМОЙ | 2013 |
|
RU2551813C1 |
| СПОСОБ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658538C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1201790A1 |
| УСТРОЙСТВО КОМПЛЕКСНОГО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2014 |
|
RU2546076C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |