1
Изобретение относится к области автоматического управления и может быть исгюльзовано в и двухотсчетныхЬистемах для задания .угла остановки рабочеI4i органа одной или нескольких следящих систем, работающих от одного блока управлзния, выполненного на сельсин-датчиках, без нарушения нещзерывности слежения остальными следящими системами, работающими от того же блока управления.
Известные устройства для задашш iypзш в системах автоматического управления содержат основной блок управления, в котором вал первого сельсин-датчика грубого отсчета механически соединен через последовательное механическое соединение первого редуктора, первого сельсин-датчика точной) отсчета, второго сельсин-датчика точного отсчета, второго редуктора, вто|Х го сепьсин датчика грубого отсчета с валом кулачка. Статорнь|е обмоткн сельсии-аатчнков точного и грубого отсчетов основного, блока управления подклк чены к 1ис, перемеяыагр навря же яя, роторные обмоткн первых сельсин-датчиков грубого и точного отсчетов-соответственно к
I:
-, роторным обмоткам сельсин-приемников
грубого и точного отсчетов первой следяшей системы, валы сельсин-приемников в которой механически соединены между собой через третий редуктор. Роторные обмотки вторых сельсин-датчиков точного и грубого отсчетов основного блока управления подключены соответственно через нормально закрытые контакты в якоря контактных групц командного реле к роторным обмоткам сельсин-гфиемников точного и «грубого отсчетов второй следящей системы, валы сельсин-приемников в которой механически соединены между собой через четвертый редуктор. Первый вывод обмотки командного реле подключен к минусовой шине постоянного напряжения, второй
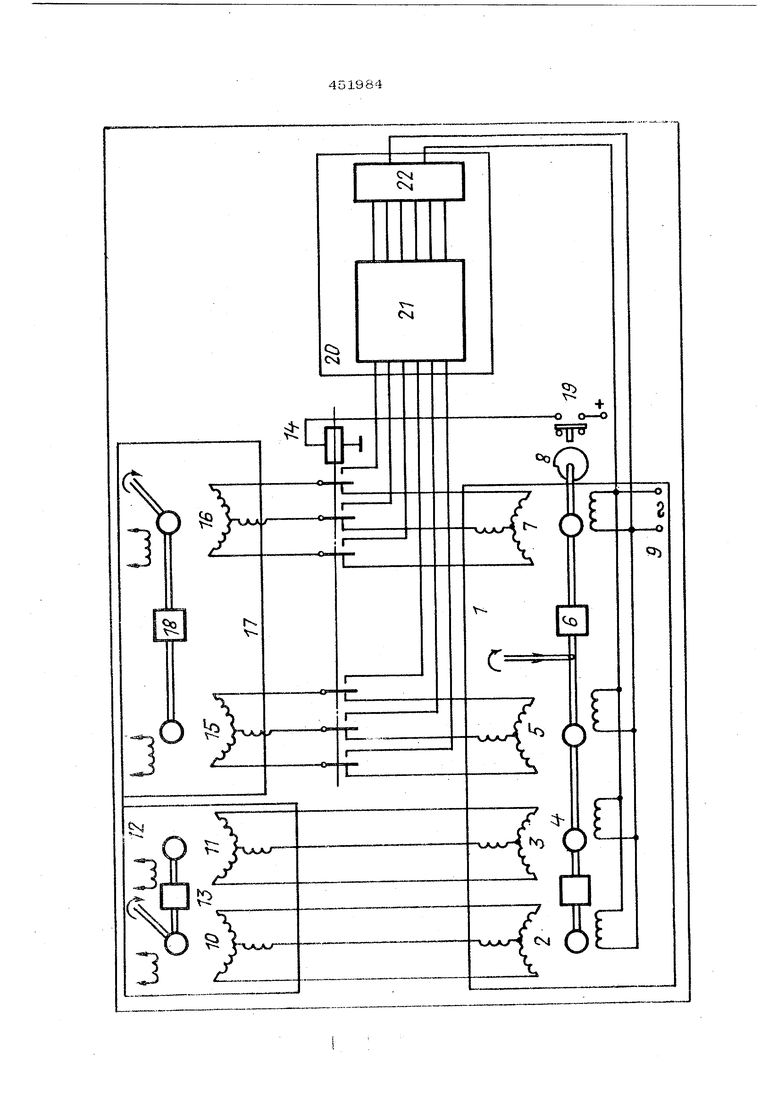
вывод через микровыключатель - к плюсовой шине постоянного напряжения и дополнительный блок управления, в котором вал сельсин-датчика грубого отсчета м&ханрчески соединен через послейовател1гI нов механическое соединение пятого ре- дуктора сельоий датчик точного отсчета и застопорен на заданном угле с помощью механического узла стопорения. Статорные обмотки сельсин-датчиков гру« бого -и ТОЧН01ЧЭ отсчетов дополнительного блока ухфавления подключены к источнику переменного напряжения, ротррньге обмотки сельсин-датчиков грубого и точного отсчетов к соответствующим нормаль но открытым контактам контактных грухш командного реле. Однако в таких устройствах дополнитель ный блок управления содержит значительное количество электромеханических и механических элементов (по два сельсин-дат чика с редуктором и узлом стопорения на каждую останавливаемую следящую систе- му), что приводит к снижению надежности устройства, усложнению и удорожанию конструкции, увеличению ее веса и габаритов. Наличие узла стопорения понижает точность и требует значительного времени на установку заданного угла. Предлагаемое устройство для задания угла в системах автоматического управле ния отличается тем, что в нем дополнительный блок управления содержит переключатель и трансформатор, первичная обмотка которого подключена /к источнику переменного напряжения, а вторичные обмогки через переключатель - к соответствующим нормально открытым контактам контактных групп командного реле. Это позволяет отказаться от испояьзо-вания сельсин-датчиков и связанных с ними узлов стопорения и редукторных передач между сельсинами грубого и точного отсчеаюв в дополнительном блоке управле- ния и тем самым повысить надемшость ра боты устройства за счет сокращения числа электромеханических и механических эле-гментов в дополнительном блоке управления с одновременным повышением его компакт ности (снижение габаритов и веса) и технологичности при сборке, повысить точность задания угла остановки следящих систем при одновременном упрощении иус корении операции установки нового утла. На чертеже показана схема предлагаемого устройства, где 1 - основной блок управления; 2 - первый сепьсин-датчик грубого отсчета; 3 - первый редуктор; 4« первый сельсин-датчик точного отсчета; 3 .« BTQDQE.. сельсин-датчик точного отсче та; 6. второй редуктор; 7 - второй сёл& син-датчик грубого отсчета; 8 - кулачок (устанавливаемый на ось второго сельс1Ш датчика грубого отсчета основного блока. гутфавлёния или в механической связи с . HHivi в отношении 1 ; 1); 9 - источник пе - ременного напряжения; Ю- сельсин-при;:емник грубого отсчета; 11 - сельсин-при-.емник точного отсчета; 12. - первая сле,дящаясистема (неостанавливаемая); 13 j третий редуктор; 14-командное реле; 15 сельсин-приемник точного отсчета; 16 - сельсин-приемник грубого отсчета; 17 - вторая следящая система (останавливаемая); 18 - четвертый редуктор; 19 - микровыключатель; 20 - дополнительный блок управления; 21 - переключатель (величины углов фиксации); 22 - трансформагор (задания угла). Так как одноотсчетная схема систем автоматического управления является составной частью двухотсчетных систем, ог раничимся описанием более общей схемы - двухотсчетной. В основном блоке управления вал первого сельсин-датчика грубого отсчета механически соединен через последовательное механическое соединение первого редуктора, первого сельсин-датчика точного отсчета, второго сельсин-датчика точного отсчета, второго редуктора, второго сельсцн-датчика грубого отсчета с валом ку. .,. S. . Статорные обмотки сельсрш-датчиков точного и грубого отсчетов основного блока управления подключены к источник переменного напряжения (частотой и напряжением отвечающему паспортным данным сельсинов, используемых в данной системе автоматического управления) Роторные обмотки первых сельсин-датчиков грубого и трчного отсчетов связаны соответственно с роторными обмотками сельсин-приемников 1рубого и точного орсчетов первой (неостанавливаемой) следящей системы, валы сельсин-приемников 10 и 11 в которой механически соединены между собой через третий редуктор 13. Роторные обмотки вторых сельсин-датчи- ков точного и грубого отсчетов основного блока управления подключены соответственно через нормально закрытые контакты и якоря контактных групп командного реле к оторным обмоткам сельсин приемников очного и грубого отсчетов второй (остаавливаемой) следящей системы 17, валы ельсин-приемников 15 и 16 в которой еханически соединены между собой через етвертый редуктор 13. Первый вывод оботки командного реле 14 подключен к , инусовой шине постоянного напряжения, торой вывод через микровыключатель 9--K рлетсоипй шйш® йостоянного на11р.яже
.5
ния. Допо7шительный бжж управления 20 содержит переключатель 21 и трансформатор 22, первичная обмотка котор6го прд--. ключена к источнику переменного напряжения 9, от которого осуществляется питание основного блока управления, а вторичные обмотки подключены через переключатель 21 к соответствующим нормально открытым контактам контактньхх грутга командного реле 14. На чертеже показано подключение вторичных обмоток трансформатора 22 только для одного положения остановки второй следящей системы 17 (заданный уТОП(уС-).
Предлагаемое устройство для задания угла в системах автоматического управления работает следующим образом.
По достижении сельсинами системы авлчэматического управления заданного угла 5Ьостановки следящих систем и продолжении вращения в сторону запрета кулачок 8, механически связанный с осью второго сельсин-датчика грубого отсчета основного блока угфавления, замыкает контакты микровыключателя 19, отрегул1фованного на включение при угле д, Микровыключатель включает командное реле 14, в результате чего 1ФОИСХОДИТ его переключение и роторные обмотки сельсин-приемников 15 и 1.6 второй следящей системы 17 отключаются от вторых- сельсин-датчиков 5 и 7 ОСНОВНОГО) блока управления и через якоря и нормально открытые контакты контактных групп командного реле 14, через переключатель 21 подключаются к вторичным обмоткам трансформатора 22, с которых в роторные обмотки сельсин-приемников 15 и 16) поступают напряжения, соответствующие по амплитуде и фазе заданному углу (остановки, которые и удерживают вторую (останавливаемую) следящую систему на заданном угле сС- Первая следящая система 12, (неостанавливаек ая1 после переключения второй следящей системы на управление от трансформатора 22 продолжает ущкшляться от основного блока уп равлешия. Продолжают синхронное вращение и отключенные от второй следящей системы 17 вторые сельсин-датчики 5 и 7 основного блока управления.
При обратном движении с помощью того же кулачка 8 по достижении угла обеспечивается переключение контактов командного реле 14, и вторая следящая система 17 вновь подключается к основному блоку управления. При необходимости изменен 1я ухла остановки второй следящей системы 17 с величины о на сХ/.происхо6
дят перестановка кулачка 8 и перерегулировка микровыктнечателя на новый угол еК., остановки и с помощью переключателя 21 подключение соответствующий новому 5 углу cjC вторичных обмоток трансформато- ра 22 к соответствующим нормально oiv крытым контактам контактных групп командного реле 14.
Предмет изобретения
Устройство для задания угла в системах автоматического управления, содержащее основной блок управления, в котором
вал первого сельсин-датчика точного о- счета механически соединен через последовательное механическое соед1шение первого редуктора, первого сельсин-датчика грубого отсчета, второго сельс1Ш-датчика точного отсчета, второго редуктора, второго сельсин-датчика грубого отсчета с валом кулачка, статорные обмотки сельс1Ш- датчиков точного и грубого отсчетов основного блока управления подключены к источнику переменного напряжения, роторные обмотки первых сельсин-датчиков точного и грубого отсчетов подключены соответст венно к роторным обмоткам сельсин-при-
емников точного и грубого отсчетов первой следящей системы, валы сельсин-приемников Б которой механически соешшены между собой через третий редуктор, роторные обмотки вторых сельсин-датчиков точного и грубого отсчетов OCHOBHOIXJ блока управления подключены соответственно через нормально закрытые контакты и якоря контактных групп командного реле к роторным обмоткам сельсин-приемников точьного и грубого отсчетов второй следящей системы, валы сельсин-приемников в которой механически соединены между собой через четвертый редуктор, первый вывод обмотки командного реле подключен к минусовой щине постоянного напряжения, второй вывод через микровыключатель - к плюсовой щине постоянного напряжения, и дополнительный блок управления, отличающийся тем, что, с целью повы-
шения надежности работы устройства и по-
I выщения точности задания угла, дoпoJши- тельный блок управления содержит переключатель и трансформатор, первичная обмотка которого подключена к источнику 1переменного напряжения, а вторичные обмотки через переключатель - к соответствующим нормально открытым контактам контактных групп командного реле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1978 |
|
SU744435A1 |
| Измеритель углового рассогласования и его производной для следящих систем | 1975 |
|
SU600518A1 |
| Следящая система | 1979 |
|
SU903803A2 |
| Следящая система | 1977 |
|
SU622044A1 |
| Устройство для измерения диаграммы направленности антенны | 1986 |
|
SU1786451A1 |
| ПАТЕИТЙО-ТЕХННЧССНДЙБИБЛИОТЕКАА. И. Ангели | 1972 |
|
SU337659A1 |
| Цифро-аналоговая следящая система | 1976 |
|
SU572774A1 |
| Следящая система | 1975 |
|
SU555377A1 |
| Следящая система | 1973 |
|
SU452804A1 |
| Устройство для измерения временных интервалов | 1989 |
|
SU1674030A1 |