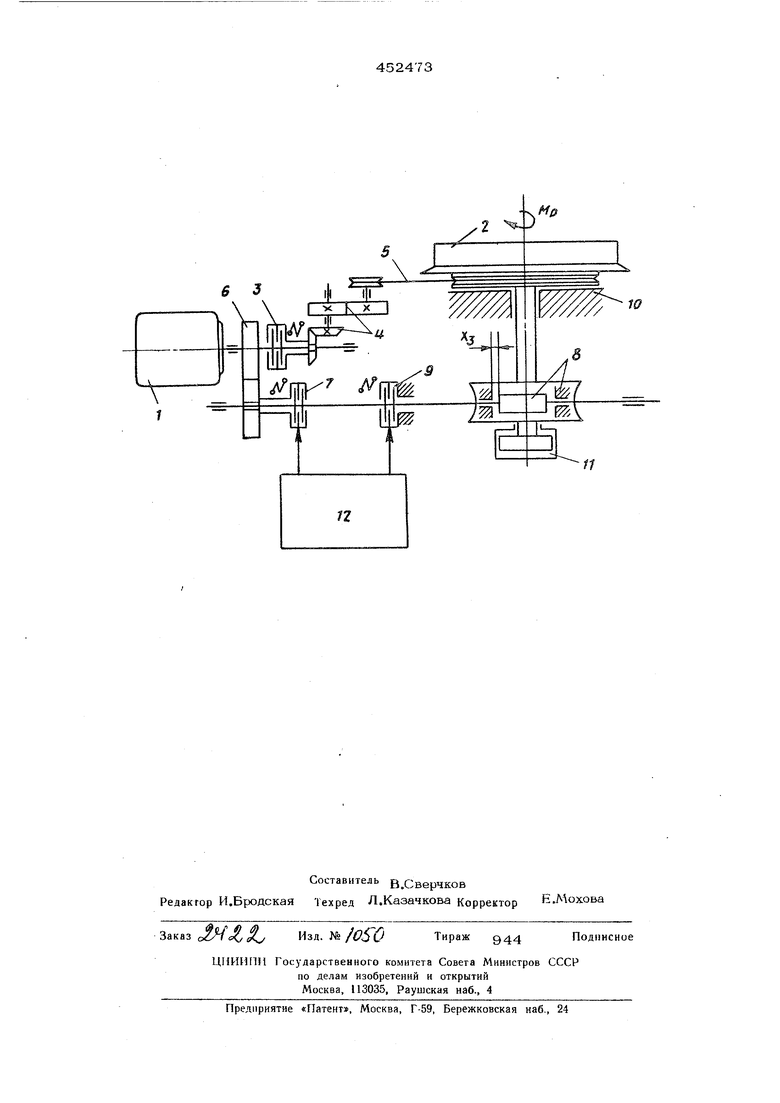
(54) СПОСОБ АВТОМАТИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ РАБОЧИХ ОРГАНОВ СТАНКОВ На чертеже изображена схема поворотно-делительного стола, реализующего пред: лагаемый способ. Привод содержит электродвигатель 1 и механизм привода. Крутящий момент на пла шайбу 2 передается от двигателя по двум кинематическим цепям. Первая цепь состоит из электромагнитной муфты 3, зубчатых передач 4 и ременной передачи 5, а вторая нз зубчатой передачи б, электромагнитной муфты 7 и червячной передачи 8. Червячная передача вьшолнена самотормозящейся без зазора в зубчатом зацеплении, но с за;зорюм в подпятнике червяка. Передаточное отношение цепи с ременной передачей меньше,чем цепи с черв5иной передачей, поэтому муфта 3 работает в режиме проскальзывания. Привод планшайбы содержит также тормозную муфту 9. Поворотная часть стола состоит из корпуса 1О, планшайбы 2, смонтированной на аэростатической опоре и зажимного устройства 11. От задающего устройства 12 на муфты 7 и 9 подаются кратковременные импульсы так, что когда одна из них включается, то другая выключается. Муфты 7 и 9 выполняют роль исполнительного устройства. В период подготовки стола к работе включаются двигатель 1, ..зажимное устройст во 11, тормозная муфта 9 и приводная муф та 3, работающая в режиме проскальзывани Приводная муфта 7 выключена. При этом червяк передачи 8 и планшайбы 9 неподвиж ны. На планшайбу воздействует крутящий момент М со стороны ременной передачи 5 Зазор Х„ в подпятнике равен нулю. о По сигналу оператора планшайба стола поворачивается на заданный угол где Х„ - осевое смещение червяка; R, - радиус делительной окружности пере-. дачи 8. Поворот происходит следующим образом. От задающего устройства на муфты 7 и подаются кратковременные импульсы напря- ;жения так, что когда одна из муфт включается,-- другая выключается. От этого 1червяк передачи 8 вращается кратковременными щагами и перемещается в осевом на правлении, поскольку червячное колесо закреплено. Это происходит до тех пор, пока муфты 7 и 9 не отработают заданное число импульсов, после чего тормозная муфта 9 остается включенной, а в подпятнике червяка образуется зазор Х, определяемый составом отработанной программы. Затем планщайба разжимается и под воз, действием момента М доворачивается с червяком до упора червяка в торец. Цикл позиционирования на этом закан 1иваетоя, В период позиционирования кратковременными шагами перемещались только элементы привода. Для этого точность шаговых перемещений значительно повышается по сравнению с известным способом. Предмет изобретения Способ автоматического позиционирования рабочих органов станков, заключающийя в том, что элементам механизма приво- , да, один из которых выполнен с двумя степенями свободы, например, в виде червяка, собранного с зазором в подпятнике, сообщают от исполнительного устройства систе мы позиционирования шаговые перемещения, отличающийс я тем, что, с целью повышения точности поз11ционирования за счет увеличения стабильности шаговых перемещений, в период, предшествующий отработ- ке исполнительным устройством шаговых перемещений, рабочий орган закрепляют, а после отработки исполнительным устройст- вом заданного числа шагов освобождают и перемещают дополнительным устройством. w -m X шу -
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического позиционирования рабочих органов станков | 1975 |
|
SU536938A2 |
| Поворотный стол | 1985 |
|
SU1268357A1 |
| ПОВОРОТНО-ДЕЛИТЕЛЬНЫЙ СТОЛ | 1996 |
|
RU2113336C1 |
| Делительное устройство | 1986 |
|
SU1468715A1 |
| Прецизионный реверсивный силовой поворотный стол | 1984 |
|
SU1222500A1 |
| Приводное устройство план-шайбы поворотно-делительного стола | 1976 |
|
SU663544A1 |
| Стол зубообрабатывающего станка | 1989 |
|
SU1731485A1 |
| Самоцентрирующая планшайба токарно-карусельного станка | 1987 |
|
SU1565599A1 |
| Электропневматический позиционный следящий привод | 1976 |
|
SU596739A1 |
| МНОГОШПИНДЕЛЬНЫЙ ЗУБОДОЛБЕЖНЫЙ СТАНОК | 1991 |
|
RU2009794C1 |