1
Изобретение ртносится к области автоматизации машиностроительного производства и преимущественно может быть использовано в манипуляторах или промышленных работах с программным управлением и в механизмах с точным остановом рабочив органов в заданной точке.
Одной из проблем в данной области является создание следящих приводов, надежно работающих в тяжелых условиях горячих цехов с агрессивными средами и обеспечивающих точное позиционирование при наличии больших скоростей заданного движения и больщих масс рабочих органов манипуляторов.
Известен следящий гидропривод, содержащий электродвигатель, гидронасос, фильтр, расходный бак для масла, регулятор давления, аккумулятор давления, электрогидравлические сервозолотники, силовые гидроцилиндры, цепные механизмы для преобразования поступательного движения во вращательное, датчики положения. Однако такой гидропривод сравнительно больщой грузоподъемности и малой инерционности обеспечивает скорость движения до 1 м/сек при точности позицирования ± 1,5-± 1,0 мм 1.
Известный следящий гидропривод обладает следующими недостатками: существенным ограничением величины линейных перемещений, значительной сложностью изготовления, недостаточной стойкостью против агрессивных воздчхцных сред, низким коэффициентом полезного действия.
Наиболее близким техническим решением к данному является электропневматический позиционный следящий привод, содержащий двигатель, обмотки которого подключены к входному каналу и выходу одного из датчиков обратной связи по перемещению исполнительного органа, который связан через червячную пару и ц.епную передачу с валом двигателя и фрикционные муфты 2.
Известный электропривод обладает следующими недостатками: больщой выбег при торможении с номинальной скорости, низкая точность нозицирования вследствие ногрещности кинематической цепи и вследствие ее упругих деформаций.
Целью настоящего изобретения является повыщение точности позиционирования электропневматического позиционного следящего привода.
Это достигается благодаря тому, что в нем
установлены пневматический исполнительный
механизм и пружинный реверсивный узел, кинематически связанный через первую фрикционную муфту с одним из концов червяка червячной пары, с другим концом которого через вторую фрикционную муфту соединен шток пневматического исполнительного механизма, полость которого соединена с выходом другого датчика обратной связи по перемещению исполнительного органа.
Привод изображен на чертеже.
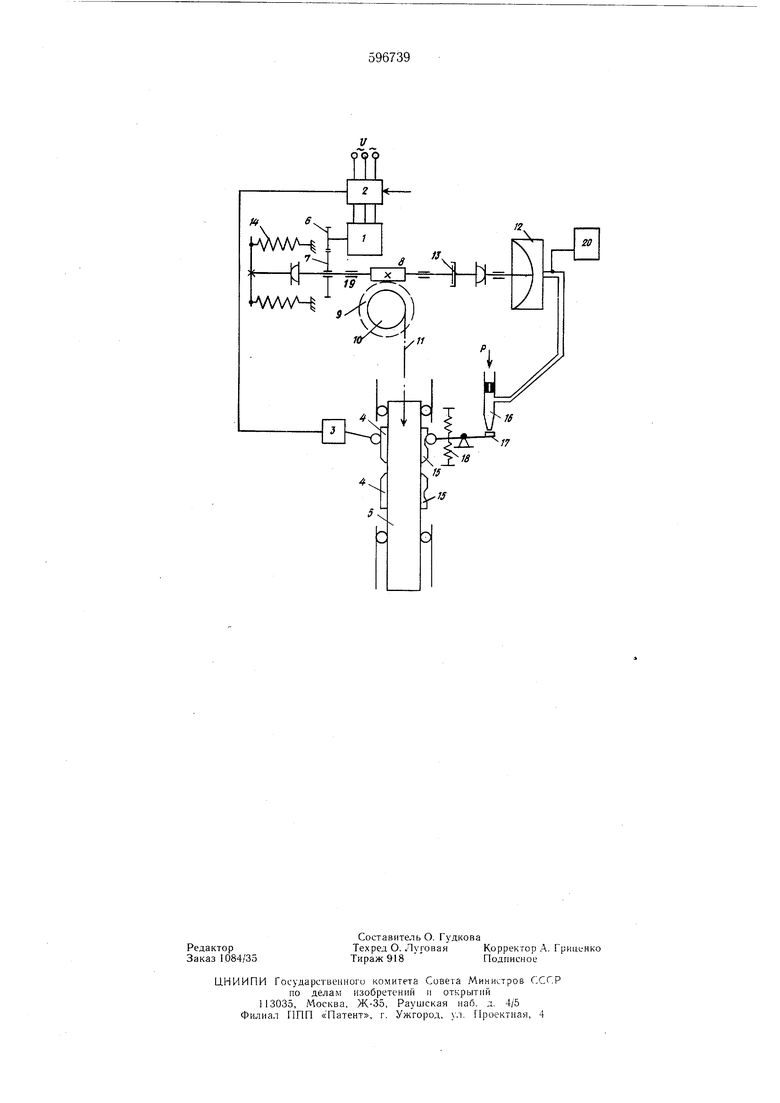
Электропневматический следящий привод, содержит двигатель 1, обмотки которого подключены к входному каналу (например, через тиристорный преобразователь 2) и выходу одного из датчиков обратной связи по перемещению исполнительного органа, один из датчиков обратной связи включает в себя бесконтактной конечный выключатель 3, на который воздействуют механические упоры 4, установленные на линии перемещения исполнительного органа 5.
Исполнительный орган 5 является рабочим органом манипулятора.
Привод включает также связанные с валом двигателя 1, зубчатую пару 6 и 7, червячную пару 8 и 9, цепную передачу 10 и 11 для передачи движения рабочему органу Л1анипулятора, пневматический исполнительный механизм 12 с фрикционной муфтой 13 и пружинный реверсивный узел 14 для обеспечения дополнительного реверсивного движения и фиксации исполнительного орлана 5 при выключении электро-пневмопитания. Пневматический исполнительный механизм управляется при помощи другого датчика обратной связи по перемещению исполнительного органа 5, механических передвижных упоров 15 рабочего органа манипулятора, которые воздействуют на пневматический исполнительный механизм через датчик обратной связи (положения) типа сопло-заслонка 16, включающий заслонку 17, удерживаемую в исходном положении пружинами 18, образуя с ними точную следян;ую систему, компенсирующую все погрещности позиционирования. Взаимосвязь пневматического исполнительного механизма 12 с двигателем 1 и рабочим органом манипулятора 5 осуществляется через концы червяка червячной пары 8, 9, имеющую две степени свободы. Двигатель 1 вращает вал червяка 8 через зубчатую пару 6, 7, пневматический исполнительный механизм 12 с пружинным -реверсивным узлом 14 обеспечивает осевое перемещение червяка, червячная пара 8, 9 работает при этом как зубчатореечная передача с весьма высоким КПД. Один из концов червяка связан с узлом 14 через фрикционную муфту 19. Червячная пара выполнена самотормозящейся. Воспроизводимое приводом перемещение задается для каждого направления движения двумя упорами (в данном случае упорами 4 и 15). Силы, воспринимаемые упорами от датчиков Б обратной связи, составляют несколько грамм. При выключении электропитания электропневматическое реле 20 сообщает рабочую полость исполнительного механизма с атмосферой, вал червяка под влиянием узла 14 переместится вправо и фрикционная муфта 13 затормозит движение.
Привод при воспроизвсдсиик заданного перемещения рабочего органа ма;1й улятора о в направлении, указанно.м на чертеже стрелкой, работает следующим образом. Двигатель 1, включенный р. сеть по сигналу системь арограм много управления тиристорным преобразователем 2 перемещает с большой скоростью рабочий орган 5 до те.х пор, пока оди;) из Mexaiinческих упоров 4 не выключит конечный выключатель 3. В результате этого двигате ;ь будет
д включен на режим интенсивного э;гектродинамического торможения. Кинематическая энергия, запасенная в рабочем органе манипулятора, при данной скорости движения больще кинематической энергии двигателя и кроме этого она, не может быть возвраи ена двигателю, так
5 как червячная пара 8 выполнена самотормозящейся. В результате этого начнется осевое перемещение вала червячка, которому будет противодействовать пнеЕзматический исполнительньй механизм 12 или узел 14. ПротиQ водействие осевому неремеьцени.ю вала червяка при торможении привода происходит следующим образом. Во время движения привода заслонка 7 датчика положения 16 надежно удерживается в фиксированном положении пружинами 18. Силы пружины достаточнЕз, чтобы
5 удержать заслонку 17 в исходном положении при изменении интенсивности струи воздуха, выходящего из сопла датчика положения 16. При движении рабочего органа манипулятора 5 вниз, двигатель привода отключается и переходит в режим электродинамического торможения. Тормозной момент, развиваемый двигателем, гасит кинетическую энершю, запасенную в его роторе и в звеньях кинематической цепи зубчатой передачи 6, 7 и червячной пары 8. Что касается кинетической энергии, запасенной в рабочем органе манипулятора 5, то она не может быть передача через самотормозящуюся червячную пару 8 о цепь двигателя и в результате этого вал червяка 8 получит осевое перемещение в направлении исполнительного механизма 12. Воздух в мембранной полости исполнительного механизма будет сжиматься, что приведет к резкому возрастанию силы противодействия осевому перемсЕцению. Таким образом, кинетическая энергии, запасенная в рабоче.м органе манипулятора 5. расходуется на преодоление избыточной силы, возникающей в исполнительном механизме 12 вследствии сжатия воздуха. При сжатии воздуха в полости исполнительного .механизма 12 расход воздуха через сопло датчика положения 16 увеличится, но это увеличение расхода
не окажет заметного влияния на начальную стадию динамического процесса торможения. так как диа.метр сопла мал и согтав.ляет величину 0,5- 1,0 мм. Однако, на конечной стадии торможения расход воздуха через сопло датчика положения 16 обеспечивает 31 ачительное демпфирующее действие, ликвидирующее колебательный процесс. Если лнев.матичесшш исполнительный механизм 12 дв гжетоя вверх то в этом случае вал червяка под влиянием динамической силы, обусловленной запасом
нетической энергии ё рабочем органе 5, будет двигаться в противоположную сторону. При этом давление сжатого воздуха в полости исполнительного механизма 12 уменьшается, а сила противодействия узла 14 возрастает, то есть испольнительный механизм 12 и узел 14 и в данном случае обеспечит существенное тормозное действие. Следует отметить, что рабочие органы роботов-манипуляторов имеют большие скорости движения 0,7-1,5 м/сек. При данных скоростях их кинетическая энергия, которая в данном случае гасится электропнеаматическим приводом, больше кинетической энергии, запасенной в роторе двигателя и в звеньях кинематической цепи 6, 7, 8. Кроме того, тормозной эффект пневмопривода может быть усилен при подходе рабочего органа манипулятора к заданной координате за счет применения упоров с двумя выступами. При движении рабочего органа манипулятора 5 вниз первый выступ первого упора 15 переместит заслонку 17 до полного закрытия сопла, при этом давление в исполнительном механизме 12, на некоторое время возрастает, что усилит тормозное действие привода, затем заслонка 17 вновь займет исходное состояние, а на втором выступе первого упора 15 пневмопривод в следяшем режиме обеспечит точную остановку рабочего органа манипулятора в данном положении. При движении рабочего органа манипулятора 5 вверх (после отключения двигателя по инерции) первый выступ второго упора 15 отодвигает заслонку 17 от сопла и понижает давление в исполнительном механизме, при этом соответствуюш,ее тормозное действие оказывают узел 14 так как сила, развиваемая исполнительным механизмом, снижается почти до нуля. Длина первых выступов упоров 15 меняется в зависимости от степени инерционности рабочих органов манипулятора и определяеся экспериментально.
Погрешность позиционирования таких электропневматических позиционных следящих приводов измеряется сотыми долями миллиметра.
Изобретение применяется в работе манипуляторе для кузнечно-штамповочных цехов, обслуживающему ковочные прессы и вращающиеся печи, и имеющему грузоподъемность 30 кг.
Настоящий привод по расчетным данным обеспечивает скорость движения рабочих органов манипулятора до 1 м/с при точности позиционирования равной ± 1,0 ± 0,05 мм.
Электропривод при той же скорости движения будет иметь точность позиционирования ± 20 -± 10 .мм, если ступенчато снижать скорость движения перед остановкой, то точно,сть позиционирования уменынится до ± 5 -г ± 3,5 мм.
По сравнению с аналогичными устройствами привод имеет следующие технико-экономические преимущества: более стойкость против агрессивных сред, так как пневматические исполнительные механизмы работают успешно в тяжелых условиях химического производства, более высокий КПД и отсутствие специальных агрегатных, насосных или компрессорных установок, так как пневматические исполнительные механизмы получают питание сжатым воздухом непосредственно из заводской сети и более высокая точность позиционирования, позволяющая расщирить область применения роботов-манипуляторов для автоматизации производства.
Формула изобретения
Электропневматический позиционный следящий привод, содержащий двигатель, обмотки которого подключены к входному каналу и выходу одного из датчиков обратной связи по перемещению исполнительного органа, который связан через червячную пару и цепную передачу с валом двигателя, и фрикционные .муфты, отличающийся тем, что, с целью повышения точности позиционирования, в нем установлены пневматический исполнительный механизм и пружинный реверсивный узел, пневматически связанный через первую фрикционную муфту с одним из концов червяка червячной пары, с другим концом которого через вторую фрикционную муфту соединен шток пневматического исполнительного механизма, полость которого соединена с выходом другого датчика обратной связи по перемещению исполнительного органа.
Источники информации, принятые во внимание при экспертизе:
1.Мясников Б. Я. и др. Програм.мное управление оборудованием. «Машиностроение, Л., 1974, с. 341, 532.
2.Авторское свидетельство СССР № 260027, кл. G 21 С 19/00, 1967.
/.
/л
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2201537C1 |
| Устройство для позиционированияРАбОчЕгО ОРгАНА | 1975 |
|
SU820651A3 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ, ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО, СТРУЙНЫЙ ДВИГАТЕЛЬ, УСТРОЙСТВО ОБРАТНОЙ СВЯЗИ, БЛОК ПЕРЕКЛЮЧАТЕЛЕЙ | 2005 |
|
RU2288376C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ДЛЯ АРМАТУРЫ НЕФТЕПРОВОДОВ | 2004 |
|
RU2271480C2 |
| Механизм позиционирования исполнительного органа | 1983 |
|
SU1114548A2 |
| ПРОПОРЦИОНАЛЬНЫЙ МОДУЛЯТОР ЭЛЕКТРОННО-ПНЕВМАТИЧЕСКОЙ ТОРМОЗНОЙ СИСТЕМЫ | 2008 |
|
RU2385242C2 |
| ДВУХКОМПОНЕНТНЫЙ ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 2005 |
|
RU2363570C2 |
| ПРИВОД СЦЕПЛЕНИЯ | 2013 |
|
RU2541603C1 |
| Устройство для перемещения исполнительных органов станков с чпу | 1980 |
|
SU897467A1 |