Изобретение относится к самонастраиваюоциыся системам и может быть использовано для регулирова)1ия инерционных объектов, статнческие характеристнки которых имеют ЭКУ:Тремум.
Известны экстремальные регуляторы, продиазиачеииые для поиска экстремального заачеиия выходного нараметра объектов управлелия. Они содержат последовательно соедниеяные предварительный усилитель, подключениый к выходу уиравляемого объекта, дифференцирующий элемент, схему управления .х/зи -ателем с модулятором и двигатель, соединенный с входом объекта.
Поиск экстрему Ма в известных устройствах юсуществляется с постоянной скоростью, кото;рая определяется напряжением на двигателе, .снимаемым с модулятора.
Реверс движения системы к экстремуму про1ВОДИТСЯ при помощи дифференцирующего элемента и схемы унравления двигателем но достиженнн снгиала иронзводной соответствующей ноляриости iriopora срабатывания схемы уиравления двигателем.
Однако известные регуляторы не обеснечивают высокой точности и быстродействия ноис:ка экстрем ма из-за постоянства скорости движения к экстремуму и инерцнонности объекта унравлення.
Цель изобретения - повышение точиосгн и
оыстродеиствия поиска экстремума.
Это достигается тем, что один из выходов предварительного усилителя соединен с входом модулятора. Введение указанной связи обесиечнвает изменение скорости движения системы к экстремуму пропорционально величине отклонения выходного параметра объекта,
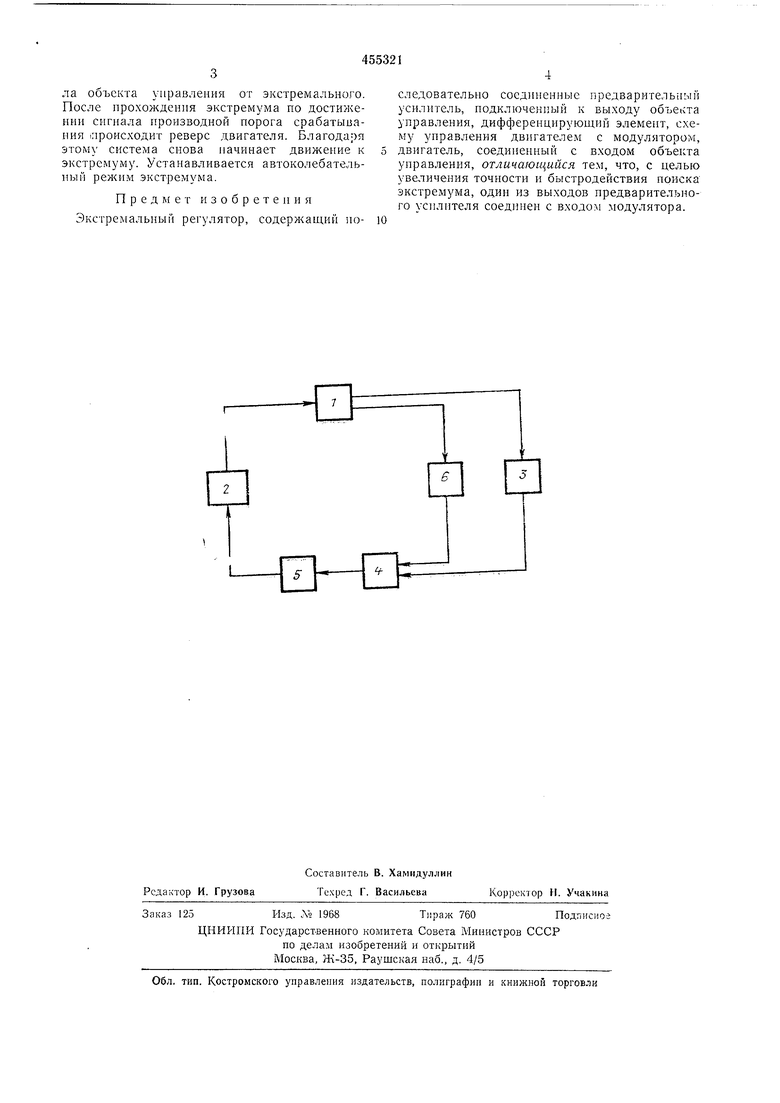
На чертеже иоказана схема предлагаемого экстремального регулятора.
Устройство включает в себя последовательно соединенные между собой предварительный усилитель }, подключенный к выходу объекта 2 управления, дифференцирующий элемент 3, схему 4 управления двигателем и нсиолнительный двигатель 5 на входе объекта управления. Один из выходов предварительного усилителя через модулятор 6 соединен с входом схемы управления двигателем.
Экстремальный регулятор работает следующим образом.
Сигнал с выхода объекта 2 управления, статическая характеристика которого имеет экстремум, после предварительного усиления усилителем /, поступает одновременно на днфференцнрующнй элемент 3 и модулятор 6. iMoдулятор через схему 4 управления двигателем II двигатель 5 осуществляет изменение скорости иоискозого движения системы иропорциональио величине отклонения выходного сигмала ооъекта управления от экстремального. После прохождення экстремума по достижении сигнала производной порога срабатывания (Происходит реверс двигателя. Благодаря этому система снова начинает движение к экстремуму. Устанавливается автоколебательный режим экстремума.
Предмет изобретения Экстремальный регулятор, содержащий носледовательно соеднненные предваритель 1ый усилитель, подключенный к выходу объекта управления, дифференцируюнднй элемент, схему управления двигателем с модулятором,
двигатель, соединенный с в.ходом объекта управления, отличающийся те.м, что, с целью увеличения точности и быстродействия поиска экстремума, один из выходов предварительного усилителя соединен с входом модулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный непрерывно-шаговыйэКСТРЕМАльНый РЕгуляТОР | 1978 |
|
SU813357A1 |
| ЭКСТРЕМАЛЬНЫЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 1967 |
|
SU189926A1 |
| Двухканальный экстремальный регулятор | 1987 |
|
SU1444713A1 |
| Экстремальный регулятор для резонансного объекта | 1982 |
|
SU1035564A1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| Система экстремального регулирования | 1983 |
|
SU1105861A1 |
| Система экстремального регулирования уровня вибраций на металлорежущем станке | 1982 |
|
SU1013909A1 |
| Импульсный экстремальный регулятор | 1974 |
|
SU458813A1 |
| Устройство для управления | 1979 |
|
SU842710A1 |
| МНОГОКАНАЛЬНЫЙ НЕПРЕРЫВНОШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1973 |
|
SU374578A1 |
