Изобретение относится к автоматике, в частности к автоматическом управлению и регулированию, а имен но к системам экстремального регу |лирования и мбжет найти применение при регулировании уровня вибраций на металлорежущих станках .с адапти HbjM управлением. Известны шаговые экстремальные системы, общим свойством которых я ляется наличие командного генерато запоминающего устройства, сигнумреле, выходного устройства, экстре мального регулятора для управления исполнительным механизмом, исполни тельного Механизма fl . Недостатками таких систем являю ся невозможность задания начальной скорости резания, устанавливаемой по условиям технологии обработки, снижение амплитуды вибраций в процессе поиска системы до минимума, а также невозможность останова сис мы при выходе в точку -экстремума. Отсутствие задания начальной ск ростИ резания исключает возможность использования таких систем для сни жения уровня вибраций изменением . скорости резания на станке. Снижение амплитуды вибраций до минимума С экстремума J в ходе рабо системы приводит к значительному изменению скорости резания от зада ной По условиям обработки. При уме шении скорости резания снижается качество обрабатываемой поверхности а при увеличении - стойкость инстру мента. По условиям обработки требуется система, позволяющая снижать вибрации до .определенного допустимого уровня, при этом необходимо изменение скорости резания в горазд меньшем диапазоне. При выходе в точку экстремума система продолжает совершать рыска ния, обусловленные невозможностью прекращения шага системы, которые приводят к ухуд1иению качества обрабатываемой поверхности. Наиболее близкой к изобретению по технической сущности является система экстремального регулирования станком, содержащая контур стабилизации мощности резания и пос ледовательно включенные датчик экстремума, первый элемент сравнения к второму входу которого подключен задатчик допустимого уровня вибраций, переключатель, выходы которого через запоминаиощие устройства подключены к первому и второму входам второго элемента сравнения, выходом соединенного через регулятор оборотов шпинделя с входом контура стабилизации Мощности резания, а также элемент И, выход которого соединен вторым входом регулятора оборотов шпинделя, первый вход через пороговый элемент подключен к выходу первого элемента сравнения, а второй вход соединен с третьим выходом блока формирования цикла, первый вход которого подключен к второму входу переключателя, а второй выход - к третьему входу второго элемента сравнения. . Контур стабилизации мощности ре.зания состоит из последовательно соединенных датчика активной мощности, элемента сравнения канала поддержания заданной мощности резания, . второй вход которого соединен с задатчиком мощности, регулятора подачи, второй вход которого подключен через блок ограничения подачи к входу привода главного движения и выходу элемента сравнения канала регулированияскорости резания, вход которого соединен с выходим регулятора оборотов шпинделя, а второй вход - с выходом задатчика скорости резания (.оборотов шпинделя , и привода подачи, выход которого через вторые вход и выход объекта регулирования подключен к входу датчика активной мощности, привод главного движения через первые вход и выход объекта регулирования подключен к входу датчика экстремума. В проце.ссе резания контур стабилизации мощности резания поддержи вает заданную величину мощности резания. Если уровень вибраций в процессе резания меньше допустимой величины вибраций h hjj, устанавливаемой задатчиком допустимого уровня вибраций, пороговый элемент через элемент И блокирует регулятор оборотов шпинделя, при этом скорость резания определяется только задатчиком скорости резания. При возникновении вибраций, больше допустимого уровня h h. , второй элемент сравнения в зависимости от знака разности выходных величин запоминающих устройств в данных момент времени вырабатывает соответствующий сигнал на регулятор Оборотов шпинделя, снижаквдий или увеличивающий заданную скорость резания. Пороговый элемент в этом случае через элемент И разблокирует регулятор оборотов шпинделя. Блок формирования цикла ( командный генератор ) управляет периодичностью подключения запоминающих устройств, направлением и длительностью сигналов управления йа регулятор оборотов шпинделя .2. Недостатки системы - возможность сбоев, т.е. потери направления перемещения и, как следствие, низкое быстродействие системы, а также отсутствие ограничения величины скорости резания, вследствие чего снижается надежность работы инструмента.
Так как при работе системы возможны значительные отклонения скорости резания от-заданной при постоянстве скорости подачи, при значительном превышении скорости увеличиваются износ инструмента и вероятность его поломки, а при большом уменьшении скорости резания снижается качество обрабатыв-аемой поверхности,
В ходе работы системы, так как сигнал вибраций пррмодулирован низкочастотными периодическими возмущениями, обусловленнь1ми биением инструмента, а число оборотов шпинделя в процессе.поиска изменяется, изменяется и частота модуляции сигнала вибраций. Вследствие постоянства частоты командного генератора запоминающие устройства измеряют промодулированный сигнал вибраций с сдвигом по фазе, что может привести к сбою системы (потере направления перемещения ) особенно на пологих участках экстремальной характеристики и, соответственно, снижению быстродействия системы,
Целью изобретения является повышение быстродер 1ствия системы и надежности работы оборудования.
Поставленная цель, достигается тем, что система, содержащая контур стабилизации мощности резания, имеющий первый, второй, третий и четвертый выходы, являющиеся соответственно первым выходом объекта регулирования, вторым выходом привода главного движения и выходом задатчика скорости резания, и вход, являющийся первым входом Элемента сравнения канала регулирования скорости резания, задатчик допустимого уровня вибраций, первое запоминающее устройство, последовательно соединенные блок формирования цикла поиска, переключатель, второе запоминающее устройство, первый элемент сравнения, регулятор оборотов шпинделя, подключенный выходом к входу контура стабилизации мощности резания, первый выход которого через последовательно соединенные датчик экстремума, второй элемент сравнения, подключенньай вторым входом к выходу задатчика допустимого уровня вибраций, пороговый элемент и элемент И подключен к второму входу регулятора оборотов шпинделя, вход и выход первого запоминающего устройства соединены соответственно с выходом переключателя и вторым входом первого элемента сравнения, вторбй и третий выходы блока формирования цикла.поиска соединены соответственно с третьим входом первого элемента сравнения и вторым входом элемента И, содержит датчик стробирую-.
иего сигнала, блок ограничения ско- рести резания, подключенный выходом к третьему входу регулятора оборотов шпинделя,, а входом - к четвертому выходу контура стабилизации мощности
резания, второй выход которого через датчик стробирующего сигнала соединен с входом блока формирования цикла поиска, последовательно соединенные блок преобразования, подключенный входом к третьему выходу контура стабилизации мощности резания, а вторым выходом - к третьему входу элемента И, и блок умножения , вход и выход которого соединены
5 соответственно с выходом второго элемента сравнения и вторым входом, переключателя.
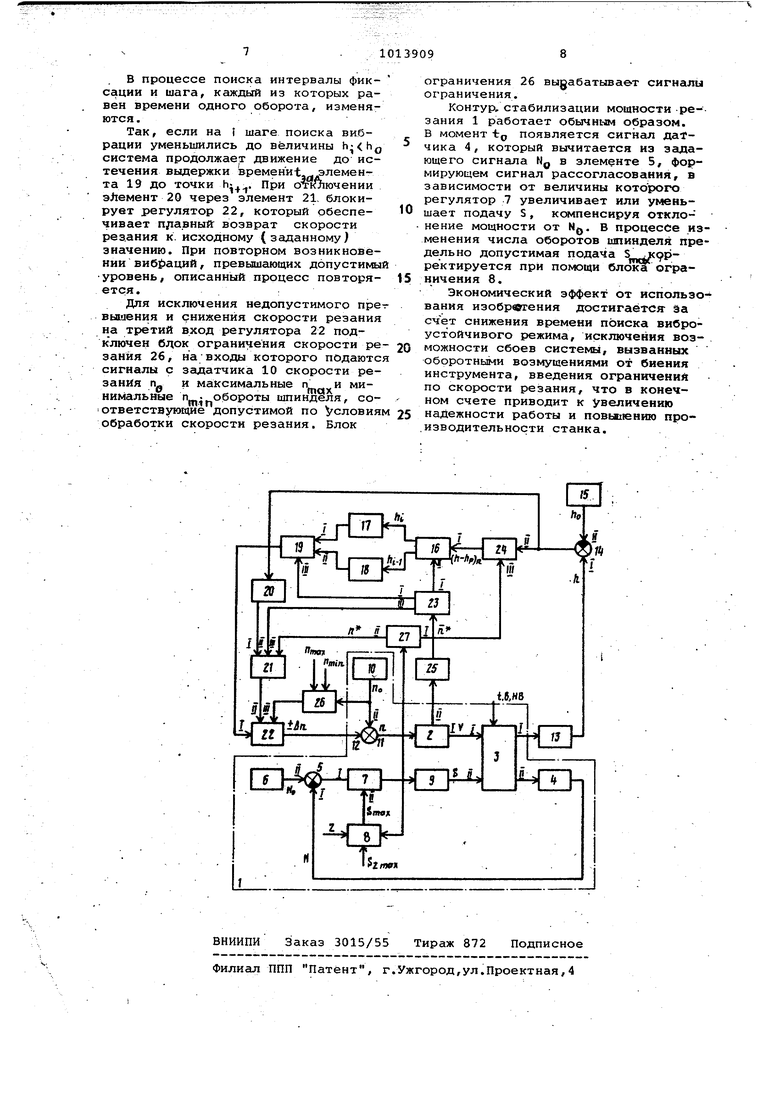
На чертеже представлена функциональная схема системы экстремального
0 регулирования.
Система содержит контур стабилизации мощности резания 1, привод главного движения станка 2, объект регулирования 3, датчик активной
5 мощности 4, элемент сравнения кангша поддержания заданной мощности резания 5, задатчик мощности 5, регуля-. тор подачи 7, блок ограничения по, г дачи 8, привод подачи 9, задатчик - скорЬсти резания 10, элемент сравне.ния канала регулирования скорости резания 11, вход управляющего воздействия из контура регулирования величины амплитуды вибраций 12, датчик экстремума 13, второй эле-.
мент сравнения 14, задатчик допустимого уровня вибраций 15, переключатель 16, запоминающие устройства 17 и 18, первый элемент сравнения 19, пороговый элемент 20, элемент И
0 21, регулятор оборотов шпинделя 22, блок формирования цикла поиска 23, блок умножения 24, датчик стробирующего сигнала 25, блок ограничения скорости резания 26 и блок преобразования 27. .
.
На чертеже показано предельно допустимый и текущий уровни вибраций Нд,К; уровень вибраций в послеQ дующий и предыдущий моменты hj, времени, заданное и текущее значения числа оборотов шпинделя пд, п , текущее прямое и инверсное значение числа оборотов шпинделя п, п, про модулированное пилообразным напряжением высокой частоты, шаг системы л п , минимальное и максимальное допустимые значения числа оборотов шпинделя,п,.., п д аданное и фактическое значения мощности
0 tt N J значение скорости подачи S, предельно допустимая подача на зуб $2 число зубьев Z, предельно допi имaя подача Zmax
на выходе порогового элемента 20 Улд,
5 сигнал на выходе элемента 21 И,
сигнал на третьем выходе блока 23 формирования цикла поиска U-,, время , задержки на отключение порогового элемента 20 t-,;, скорость резания V, пропорциональнаячислу оборотов шпинделя..
Система работает следующим обра;зом.
До врезания уровень вибраций h незначителен и намного меньше пре- . дельно допустимого уровня HQ, задаБаемого задатчиком 15. Блок 23 формирования цикла поиска ( командный генератор) подает команды на управляющие входы переключателя 16, элемента сравнения 19 и на элемент 21 И. Однако .от регулятора 22 на вход 12 элемента 11 сравнения сигналы не проходят, так как пороговый элемент 20 подает на первый вход элемента 21 И сигнал запрета,екото- 20 рый с выхода элемента 21 И блокирует регулятор 22. В этот отрезок времени на главный, привод 2 подается сигнал Пд с задатчика скорости резания (оборотов шпинделя ) 10. 25
В момент врезания t повышается уровень вибраций h и если он превысит допустимый уровень h, задаваемь1й задатчиком 15, срабатывает пррЬговый элемент 20 и снимает запретзо с элемента И 21 тем самым разблокируя регулятор 22. Пороговый элемент 20 имеет задержку на отключение для исключения запрета движения системы в моменты провалов амплиту- 35 ды вибраций, определяемых биением инструмента В интервал времени t производится фиксация начального состояния объекта регулирования 3, На этом интервале система .анализирует уровень вибраций ив конце интервала t сравнивает с уровнем вибраций в предыдущий отрезок времени, когда также производилась фиксация объекта регулирования. В зависимости от результата сравне- 45 ния уровней вибрации элемент 19 подает сигнал на регулятор 22, подключая сигнал с выхода элемента 21 на прямой или инверсный входы регулятора 22, тем самым увеличивая или 50
уменьшая скорость резания.
Для исключения сбоев системы, (потери направления перемещения}, вызваннь тем, что запоминающие устрой- ства 17 и 18 измеряют промодулироанный низкочастотными возмущенияи, обусловленными биением инструента, сигнал вибраций с сдвигом о фазе при изменении скорости резания и постоянной частоте командного О енератора блока 23, в схему введен атчик 25 стробирующего сигнала, синронизирующий частоту командного енератора 23 с частотой вращения ривода 2 главного движения. 65
. При этом, чтобы обеспечить нёзависимую работу запоминающих устройс 17 и 18 от интервала анализа, который изменяется в ходе изменения скорости резания, введены блоки 27 и 24 преобразования и умножения соответственно. Блок 27 преобразования (шип) преобразует аналоговый сигнал величины оборотов шпин:деля в импульсный с определенной длительностью импульсов и выдает прямой и инверсный илшульсные сигт налы. Инверсный импульсный сигнал п поступает на блок 24 умножения, перемножающий величины h-h и п. Напряжение запоминающих устройств 17 и 18 при этом
r/n
%r-j{ -V
dt (n-n),
не зависит от изменения длительности интервала анализа, вызванного изменением скорости резания. Так как частота блока 23 синхронизирована со скоростью резания, при изменении скорости резания меняется и величина шага поиска Лп, что ведет к увеличению времени поиска и потерь на рыскание.
Для обеспечения постоянства величины шага поиска дп на вход элемента 21 И заводится импульсный сигнал п с выхода блока 27 преобразования, который в момент разрешения подачи управляющего воздействия на регулятор 22, производимого блоком 23 формирования цикла, проходит на прямой или инверсный входы регулятора 22 в зависимости от направления перемещения системы. При этом увеличении скорости резания, когда длительность управляющего воздействия на регулятор 22 уменьшается, ширина нмпульсов п увеличивается и, наоборот тем самым регулятор 22 интегрирует всегда постоянную величины шага .лп.
Предположим, что после фиксации (интервал t) был произведен шаг Дп в противоположною сторону от минимума. В этом случае уровень вибраций увеличился и система замерив уровень вибраций в интервале времени tg t и сравнив его с предыдущим замером в интервале времени tg- t , меняет направление движения (интервал Теперь, когда направление движения системы направлено к минимуму вибраций, после каждого шага, фиксации нового состояния и сравнения нового и предыдущего элемент 19 не изменяет своего состояния, а следовательно, не изменяется и направление движения системы.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирова-Ния CTAHKOM | 1979 |
|
SU815715A1 |
| Система экстремального регулирования амплитуды вибраций на металлорежущем станке с выдвижным шпинделем | 1985 |
|
SU1352453A1 |
| Система экстремального управления металлорежущими станками | 1979 |
|
SU926618A1 |
| Система адаптивного управления металлорежущим станком | 1981 |
|
SU996997A1 |
| Способ ограничения вибраций на металлорежущем станке и устройство для его осуществления | 1985 |
|
SU1278815A1 |
| Система адаптивного управления | 1983 |
|
SU1133583A1 |
| Устройство для адаптивного управления станком | 1977 |
|
SU684513A1 |
| Система экстремального регулирования | 1982 |
|
SU1068890A1 |
| Система адаптивного управления металлорежущим станком | 1980 |
|
SU1001013A1 |
| Адаптивная система управления фрезерным станком | 1982 |
|
SU1041990A1 |
СИСТЕМА ЭКСТРЕМАЛЬНОГО. РЕГУЛИРОВАНИЯ УРОВНЯ. ВИВРАЦИЙ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ, содержащая контур стабилизации мощности резания, имеющий.первый, второй, третий и четвертый выходы, являющиеся соответственно первым выходом объекта регулирования, вторым выходом привода главного движения станка, входом привода главного движения станка и выходом задатчика скорости резания, и вход, являющийся первым входом элемента сравнения канала регулирований скорости резания, заг датчик допустимого уровня вибраций, первое запоминающее устройство, последовательно соединенные блок формирования цикла поиска, переключатель, второе запоминающее устройство первый элемент сравнения, регулятор оборотов шпинделя, подключенный выходом к входу контура стабилизации мощности резания, первый выход кото рого через последовательно соединенные датчик экстремума, второй эле-- j мент сравнения, подключенный вторым входом к выходу задатчика допустимого уровня вибраций, пороговый элемент и элемент И подключен к второму входу регулятора оборотов шпинделя, вход и выход первого запоминаю, щего устройства соединены соответственно с выходом переключателя и втог рым входом первого элемента сравнения, второй и третий выходы блока формирования цикла поиска соединены соответственно с третьим входом первого элемента сравнения и вторым , входом элемента И, о т л и чаю щ а я с я тем, что, с целью повышения быстродействия системы и надежг СЛ ности работы Оборудования, она со- . держит датчик стробирующего сигнала, блок ограничения скорости резания, подключенный выходом к третьему вхо- ё ду регулятора оборотов шпинделя, а 1, входом - к четвертому выходу контура стабилизации мощности резания, второй выход которого через датчик стробирующего сигнала соединен с оо со о ф входом блока формирования.цикла поиска, последовательно соединенные блок преобразования, подключенный входом к третьему выходу контура стабилизации мощности резания, а вто:рым выходом к третьему входу эле|мента И, и блок умножения, вход и выход которого соединены соответственно с выходом второго элемента сравнения и вторым входом переключателя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Либерзон Л.М | |||
| , Родов А.Б | |||
| Шаговые экстремальные системы | |||
| М;, Энергия, 1969, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система экстремального регулирова-Ния CTAHKOM | 1979 |
|
SU815715A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
