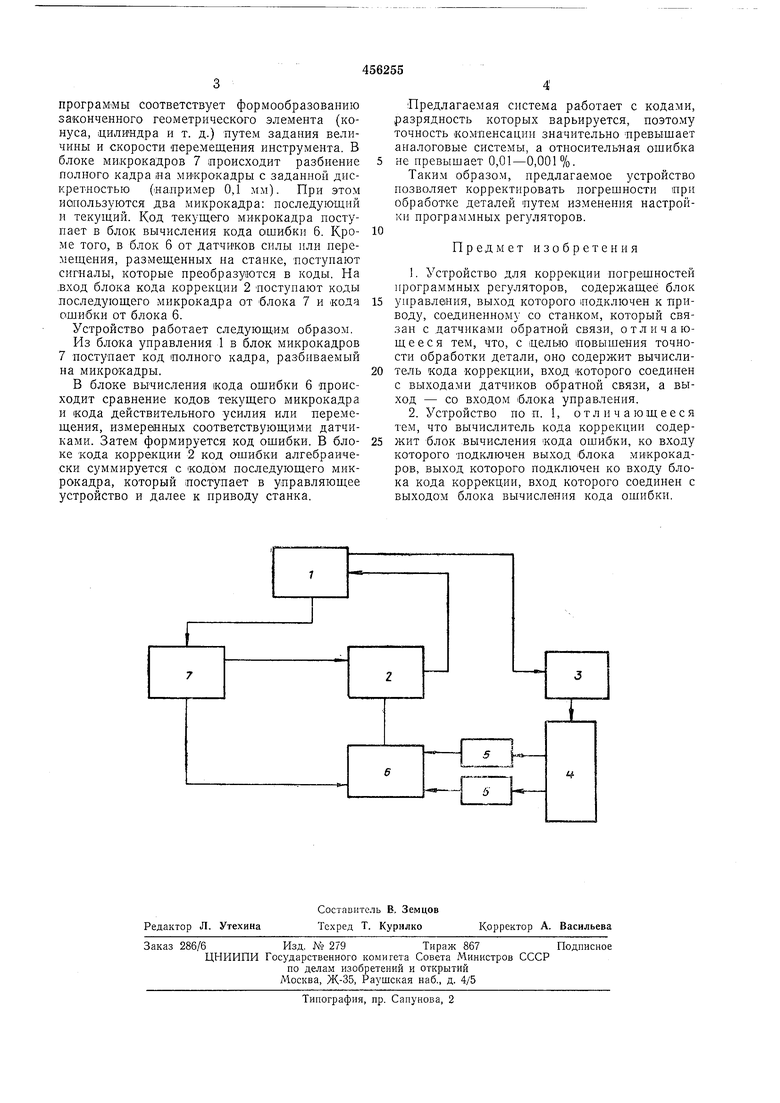
программы соответствует формообразованию законченного геометрического элемента (конуса, цилиндра и т. д.) путем задания величины и скорости перемещения инструмента. В блоке микрокадров 7 происходит разбиение полного кадра иа микрокадры с заданной дискретностью («апример 0,1 мм). При этом используются два микрокадра: последующий и текущий. Код текущего микрокадра поступает в блок вычисления кода ошибки 6. Кроме того, в блок 6 от датчиков силы или перемещения, размещенных на стапке, поступают сигналы, которые преобразуются в коды. На .вход блока кода коррекции 2 поступают коды последующего микрокадра от блока 7 и «ода ошибки от блока 6.
Устройство работает следующим образом.
Из блока управления 1 в блок микрокадров 7 поступает код полного кадра, разбиваемый на микрокадры.
В блоке вычисления кода ощибки 6 происходит сравнение кодов текущего микрокадра и «ода действительного усилия или перемещения, измеренных соответствующими датчиками. Затем формируется код ошибки. В блоке кода коррекции 2 код ошибки алгебраически суммируется с кодом последующего микрокадра, который поступает в управляющее устройство и далее к приводу станка.
Предлагаемая система работает с кодами, разрядность которых варьируется, поэтому точность компенсации значительно превышает аналоговые системы, а относительная ошибка не превышает 0,01-0,001%.
Таким образом, предлагаемое устройство позволяет корректировать погрешности при обработке деталей путем изменения настройки программных регуляторов.
Предмет изобретения
1.Устройство для коррекции погрешностей программных регуляторов, содержащее блок
управления, выход которого подключен к приводу, соединенному со станком, который связан с датчиками обратной связи, отличающееся тем, что, с щелью повышения точности обработки детали, оно содержит вычислитель кода коррекции, вход которого соединен с выходами датчиков обратной связи, а выход - со входом блока управления.
2.Устройство по п. 1, отличающееся тем, что вычислитель кода коррекции содержит блок вычисления кода ошибки, ко входу которого подключен выход блока микрокадров, выход которого подключен ко входу блока кода коррекции, вход которого соединен с выходом блока вычисления кода ошибки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управле-Ния элЕКТРОННОлучЕВОй уСТАНОВКи | 1979 |
|
SU840810A1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| Цифровой следящий привод | 1980 |
|
SU930247A1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| БЕЗОПАСНЫЙ СПОСОБ СТРЕЛЬБЫ (ЕГО ВАРИАНТЫ) И БЕЗОПАСНЫЙ ПРИЦЕЛ ДЛЯ СТРЕЛЬБЫ ПО ДВИЖУЩИМСЯ ЦЕЛЯМ | 2010 |
|
RU2447391C2 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| Электропривод постоянного тока | 1983 |
|
SU1102001A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ РАДИОТЕЛЕСКОПА | 2006 |
|
RU2319171C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ УСЛОВНОГО ВРЕМЕНИ СГОРАНИЯ МАССЫ РАЗГОННОГО БЛОКА | 2001 |
|
RU2209157C1 |
