1
Изобретение относится к машииостроеиию. Известны сиособы контроля величины Мертвого хода механизмов, основанные на том, что контролируемую цепь нагружают реверсивной и переменной по Величине нагрузкой при сохранении направления вращения и измеряют перемещения ведущего звена относительно общего начала отсчета при одном и том же положении ведомого звена.
Однако известные способы характеризуются высокой трудоемкостью контроля величины мертвого хода, так как для силовых кинематических цепей необходимо нагружать ведомое звено большими по величине нагрузкам, что сопряжено с большими техническими трудностями.
Цель изобретения - снизить трудоемкость измерений величины мертвого хода силовых кинематических цепей.
Это достигается тем, что перед нагружением звеньев цепи стопорят ведомое звено, производят нагружение ведущего звена, измеряют перемещения ведомого звена и вычитают величины этих перемещений из измеренных перемещений ведущего звена.
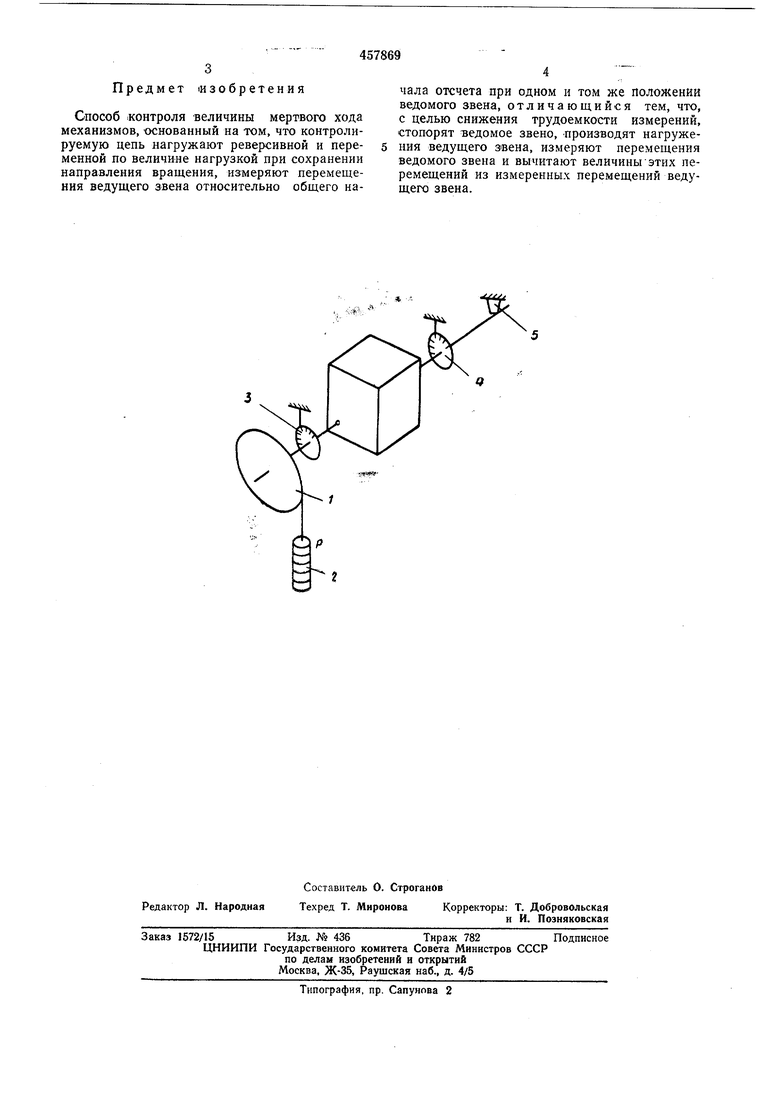
На чертеже изображен пример реализации описываемого способа при контроле величины Мертвого хода редуктора. .
Схема контроля содержит приспособление 1 для нагружения ведущего звена, нагрузку
, измерительное устройство 3 ведущего звена, змерительное устройство 4 ведомого звена и тоиорящее устройство 5 ведомого звена. Процесс контроля величины мертвого хода
по описываемому способу протекает следующим образом. Ведомое звено кинематической цепи стопорится технологическим устройством 5. Па ведущее и ведомое звенья устанавливают измерительные устройства, из которых устройство 3 предназначено измерять перемещения ведущего звена, а устройство 4 - перемещения ведомого звена. Ведущее звено цепи нагружают моментом. Снимают показания измерительных устройств 3, 4 и принимают
их за иачала отсчетов. Последовательно уменьшая величину приложенной нагрузки, измеряют перемещения ведущего и ведомого звеньев относительно принятых начал отсчета.
Затем реверсируют нагрузку и, последовательно увеличивая ее, проводят аналогичные измерения. По полученным данным вычисляют перемещения ведущего звена, обусловленные податливостью и мертвым ходом стопорящего устройства. Вычитая из измеренных перемещений ведущего звена приведенные к этому звену перемещения ведомого, получают перемещения ведущего звена, обусловленные только упругими деформациями и мертвым ходом цепи.
Предмет изобретения
Способ контроля величины мертвого хода механизмов, основанный на том, что контролируемую цепь нагружают реверсивной и переменной по величине нагрузкой при сохранении направления вращения, измеряют перемещения ведущего звена относительно общего начала отсчета при одном и том же положении ведомого звена, отличающийся тем, что, с целью снижения трудоемкости измерений, стопорят -ведомое звено, Производят нагружения ведущего звена, измеряют перемещения ведомого звена и вычитают величины этих перемещений из измеренных перемещений ведущего звена.