1
Изобретение относится к области водного транспорта и предназначено для выполнения операций по спуску и подъему плавсредств в открытом море.
Известны устройства для спуска и подъема плавсредств в открытом море, включающие грузовую лебедку, полиспастную систему с гидроцилиндром, соединенным с гидроаккумулятором и следящей гидросистемой, а также грузовой захват.
Для выполнения спуско-подъемных операций в открытом море в таких устройствах предусматривается следящий режим работы лебедки посредством гидроцилиндра натяжения, связанного с полиспастной системой и воздействующего на барабан лебедки через зубчато-реечную передачу, приводимую в действие гидросистемой привода.
Однако в известных устройствах существуют большие динамические усилия в металлоконструкции и в полиспастной системе из-за появления слабины в канатной проводке, а также возможно возникновение несогласованных колебаний плунжера гидроцилиндра натялсения по отношению к спектру ординат морского волнения.
Цель изобретения - выполнение спускоподъемных операций в режиме слежения за волной.
Это достигается тем, что следящая гидросистема снабжена датчиком нагрузки, установленными па полиспастной системе, реле давления, датчиками среднего положения плунжера гидроцилиндра, механизмом настройки давления, клапаном-отсекателем гидроцилиндра и запорным золотником гидроаккумулятора; при этом механизм настройки давления состоит из параллельно включенных в гидросистему питающего насоса с золотником прокачки и управляемого клапана настройки давления с другим запорным золотником, датчики среднего положения плунжера гидроцилиндра связаны электрически с управляемым клапаном механизма настройки давления и золотником прокачки насоса, а датчик нагрузки одним выходом связан с запорным золотником гидроаккумулятора, а другим - с клапаном-отсекателем, а реле давления связано с управляемым клапаном механизма настройки давления и золотником прокачки насоса.
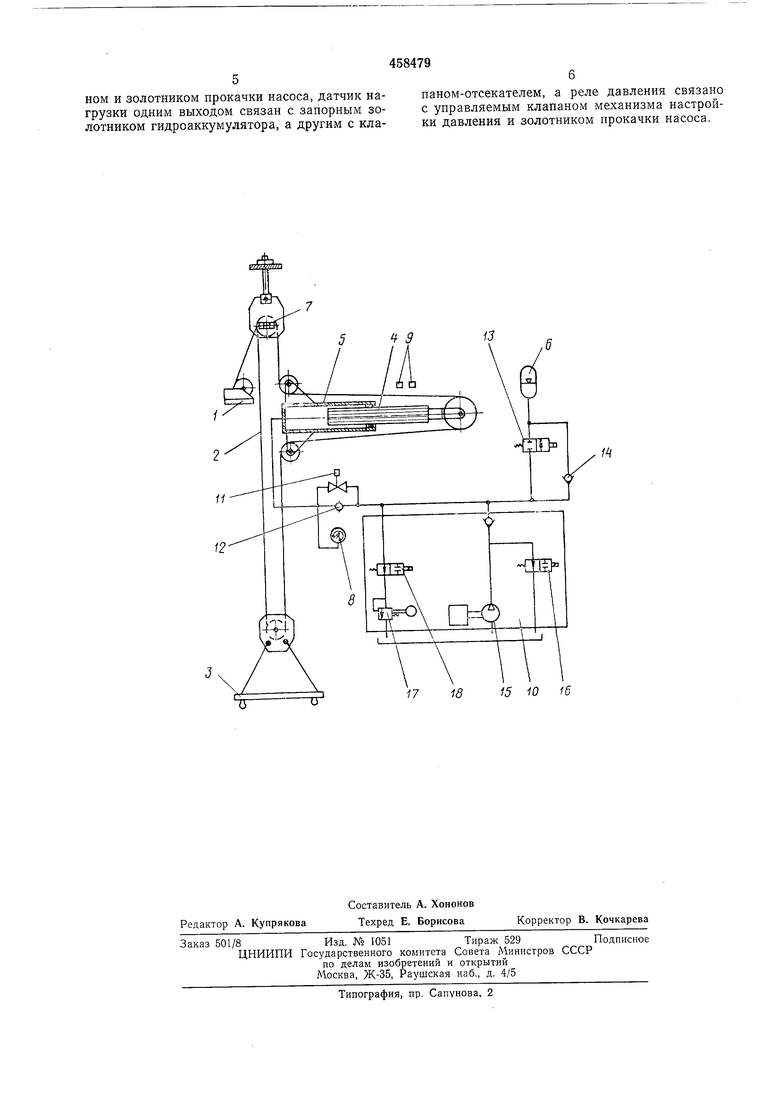
На чертеже изображена принципиальная схема предлагаемого устройства.
Грузовая лебедка 1 с помощью полиспастной системы 2 связана с грузовым захватом 3 и плунжером 4 гидроцилиндра 5 натяжения, соединенного с гидроаккумулятором 6 и следящей системой. Последняя снабжена датчиком 7 нагрузки, установленным на полиспастной системе, реле 8 давления, датчиками 9
среднего положения плунжера 4 гидроцилиндра 5 и механизмом 10 настройки давления.
Датчик 7 нагрузки одним выходом связи с клапаном-отсекателем 11, снабженным обратным клапаном 12, а другим - с запорным золотником 13 гидроаккумулятора, снабженным обратным клапаном 14.
Механизм 10 настройки давления состоит из параллельно включенных в гидросистему питающего насоса 15 с золотником 16 прокачки и управляемого клапана 17 настройки давления с другим запорным золотником 18.
Предлагаемое устройство работает следующим образом.
Перед подъемом плавсредства с поверхности моря осуществляется операция стыковки грузового захвата 3, в процессе опускания которого автоматически поддерживается среднее по длине гидроцилиндра 5 положение плунжера 4. Для этого, в случае увеличения или уменьшения усилия в полиспастной системе 2, датчики 9 и реле 8 давления воздействуют на механизм 10 настройки давления, в результате чего золотник 16 прокачки переключается в положение работы питающего насоса 15 на гидроцилиндр 5 натяжения, а клапаном 17 настройки давления создается давление в гидросистеме, соответствующее усилию в полиспастпой системе 2, и плунжер 4 выводится в среднее положение.
При этом гидроаккумулятор 6 с помощью золотника 13 отключается от гидроцилиндра, а питающим насосом 15 через обратный клапан 14 поддерживается постоянное давление в гидроаккумуляторе 6.
В результате стыковки грузового захвата 3 с плавсредством происходит переключение запорного золотника 18 в положение перекрытия управляемого клапана. 17 настройки давления, а золотник 13 устанавливается в положение, при котором гидроаккумулятор 6 сообщается с рабочей полостью гидроцилиндра 5 натяжения.
При подъеме плавсредства, состыкованного с грузовым захватом 3, на вершину волны ее энергией, образующаяся в нолиспастной системе 2 слабина выбирается перемещением плунжера 4 вправо под действием давления жидкости, поступающей из гидроаккумулятора 6 в рабочую полость гидроцилиндра 5 натяжения.
При опускании плавсредства, состыкованного с грузовым захватом 3, во впадину волны ее энергией, плунжер 4 перемещается влево, в результате чего изменяется длина полиспастной системы 2 на величину высоты волны, при этом избыток жидкости из рабочей полости гидроцилиндра 5 натяжения поступает снова в гидроаккумулятор 6.
Таким образом обеспечивается режим слежения грузового захвата при состыкованном состоянии последнего с плавсредством.
В режимах слежения и автоматического поддержания в среднем по длине гидроцилиндра 5 положении плунжера 4 клапан-отсекатель И обеспечивает двухстороннюю проводимость рабочей жидкости в гидросистеме. Грузовая лебедка 1 включается на режим подъема от датчика 7 нагрузки в начале фазы подъема плавсредства энергией волны после нахождения его во впадине последней, при
этом выходной сигнал датчика 7 нагрузки переключает клапан-отсекатель 11 в полол ение «закрыто, обеспечивая этим одностороннюю проводимость жидкости в гидросистеме. В процессе подъема плавсредства с впадины
волны на ее вершину через обратный клапан
12 обеспечивается постоянное пополнение
жидкостью из гидроаккумулятора 6 рабочей
полости гидроцилиндра 5 натяжения.
Плавсредство, поднятое на вершину волны,
остается на весу после ухода последней из-под днища, так как жидкость, находящаяся в рабочей полости гидроцилиндра 5 натяжения, оказывается в замкнутом объеме. В процессе спуска плавсредства на воду и
при частичном его погружении срабатывает датчик 7 нагрузки, выходной сигнал которого устанавливает запорный золотник 18 в положение, при котором управляемый клапан 17 настройки давления отключается от гидросистемы, в то же время гидроаккумулятор 6 посредством золотника 13 подключается к напорной магистрали гидроцилиндра 5 натялсения, а питающий насос 15 через золотник 16 прокачки включается на прокачку жидкости.
Этим достигаются согласованные периодические колебания плунжера 4 гйдроцилиндра 5 натяжения, соответствующие изменению высоты волны, что обеспечивает следящий режим работы устройства при нахождении плавсредства на поверхности моря.
Предмет изобретения
Устройство для спуска и подъема плавсредств в открытом море, включающее грузовую лебедку, полиспастную систему с гидроцилиндром, соединенным с гидроаккумулятором и следящей гидросистемой, а также грузовой захват, отличающееся тем, что, с целью выполнения спускоподъемных операций в режиме слежения за волной, следящая гидросистема снабжена датчиком нагрузки, установленным на полиспастной системе, реле давления, датчиками среднего положения плунжера гидроцилиндра, механизмом настройки давления, клапаном-отсекателем гидроцилиндра и запорным золотником гидроаккумулятора, при этом механизм настройки давления
состоит из параллельно включенных в гидросистему питающего насоса с золотником прокачки и управляемого клапана настройки давления с другим запорным золотником, датчики среднего положения плунжера гидроцилиндра
связаны электрически с управляемым клапаном и золотником прокачки насоса, датчик нагрузки одним выходом связан с запорным золотником гидр о аккумулятор а, а другим с клапаном-отсекателем, а реле давления связано с управляемым клапаном механизма настройки давления и золотникам прокачки насоса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для спуска и подъема плавсредств в открытом море | 1977 |
|
SU988648A1 |
| Устройство для спуска и подъема плавсредств в открытом море | 1979 |
|
SU1022864A1 |
| ГИДРОПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2020 |
|
RU2733004C1 |
| Судовое грузовое устройство для безударной передачи груза в море | 1985 |
|
SU1255508A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Устройство для контроля нагрузки на ваерах и автоматического растормаживания траловой лебедки | 1972 |
|
SU473667A1 |
| УСТРОЙСТВО ДЛЯ БЕЗУДАРНОЙ ПОГРУЗКИ ГРУЗА НА ПАЛУБУ СУДНА ПРИ ВОЛНЕНИИ МОРЯ | 1973 |
|
SU368111A1 |
| Устройство для выборки слабины в грузовых канатах спуско-подъемных устройств на волнении | 1975 |
|
SU652035A1 |
| ГИДРОПРИВОД ГЛУБИННОГО ШТАНГОВОГО НАСОСА | 2004 |
|
RU2272933C1 |
| Гидропривод подъема и опускания жатки сельскохозяйственной машины | 1988 |
|
SU1583026A1 |
7 1815 Ю 16
