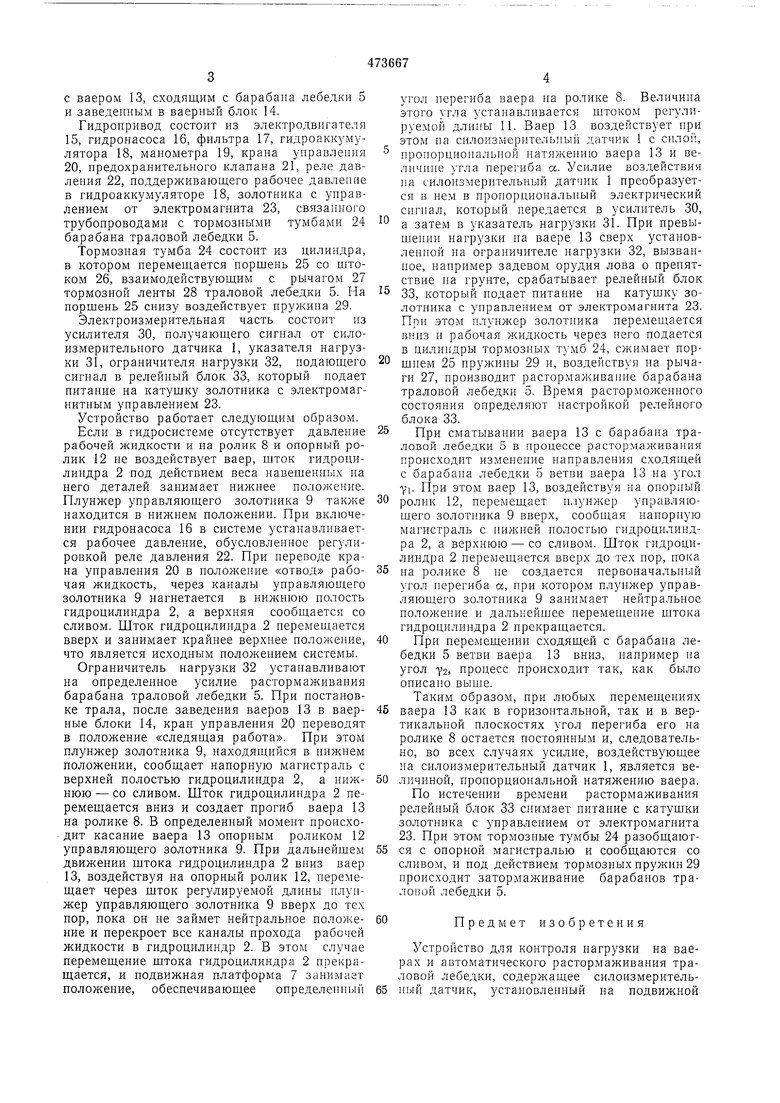
с ваером 13, сходящим с барабана лебедки 5 и заведенным в ваериый блок 14.
Гидропривод состоит из электродвигателя 15, гидронасоса 16, фильтра 17, гидроаккумулятора 18, манометра 19, крана управления 20, предохранительного клапана 21, реле давления 22, поддерживающего рабочее давление в гидроаккумуляторе 18, золотника с управлением от электромагнита 23, связащюго трубопроводами с тормозными тумбами 24 барабана траловой лебедки 5.
Тормозная тумба 24 состоит из цилиндра, в котором перемещается порщень 25 со щтоком 26, взаимодействующим с рычагом 27 тормозной ленты 28 траловой лебедки 5. На поршень 25 снизу воздействует пружина 29.
Электроизмерительная часть состоит из усилителя 30, получающего сигнал от силоизмерительного датчика 1, указателя нагрузки 31, ограничителя нагрузки 32, подающего сигнал в релейный блок 33, который подает питание на катущку золотника с электромагнитным управлением 23.
Устройство работает следующим образом.
Если в гидросистеме отсутствует давление рабочей жидкости и на ролик 8 и опорный ролик 12 не воздействует ваер, щток гидроцилиндра 2 под действием веса навещенных на него деталей занимает нижнее положение. Плунжер управляющего золотника 9 также находится в нижнем положении. При включении гидронасоса 16 в системе устанавливается рабочее давление, обусловленное регулировкой реле давления 22. При переводе крана управления 20 в положение «отвод рабочая жидкость, через каналы управляюи его золотника 9 нагнетается в нижнюю полость гидроцилиндра 2, а верхняя сообщается со сливом. Шток гидроцилиндра 2 перемен ается вверх и занимает крайнее верхнее положение, что является исходным положением системы.
Ограничитель нагрузки 32 устанавливают на определенное усилие растормаживания барабана траловой лебедки 5. При постановке трала, после заведения ваеров 13 в ваерные блоки 14, кран управления 20 переводят в положение «следящая работа. При этом плунжер золотника 9, находящийся в нижнем положении, сообщает напорную магистраль с верхней полостью гидроцилиндра 2, а нижнюю - со сливом. Шток гидроцилиндра 2 перемещается вниз и создает прогиб ваера 13 на ролике 8. В определенный момент происходит касание ваера 13 опорным роликом 12 управляющего золотника 9. При дальпейщем движении щтока гидроцилиндра 2 вниз ваер 13, воздействуя на опорный ролик 12, перемещает через щток регулируемой длины плупжер управляющего золотника 9 вверх до тех пор, пока он не займет нейтральное положение и перекроет все каналы прохода рабочей жидкости в гидроцилиндр 2. В этом случае перемещение щтока гидроцилиндра 2 прекращается, и подвижная платформа 7 занимает положение, обеспечивающее определенный
угол перегиба ваера на ролике 8. Величина этого угла устанавливается щтоком регулируемой длины 11. Ваер 13 воздействует при этом па силоизмерительиый датчик 1 с силой, пропорциональной натяженню ваера 13 и величине угла перегиба а. Усилие воздействия па силоизмерительный датчик 1 преобразуется в нем в пропорциональный электрический сигнал, который передается в усилитель 30,
а затем в указатель нагрузки 31. При превышении нагрузки па ваере 13 сверх установлеппой па ограничителе нагрузки 32, вызванное, например задевом орудия лова о препятствие па грунте, срабатывает релейный блок
33, который подает питание на катущку золотника с управлением от электромагнита 23. При этом плунжер золотника перемещается вниз и рабочая жидкость через пего подается в цилиндры тормозных тумб 24, сжимает порщпем 25 пружины 29 и, воздействуя на рычаги 27, производит растормаживание барабана траловой лебедки 5. Время расторможенного состояния определяют настройкой релейного блока 33.
При сматывании ваера 13 с барабана траловой лебедки 5 в процессе растормаживания происходит изменение направления сходящей с барабана лебедки 5 ветви ваера 13 на угол YI. При этом ваер 13, воздействуя на опорный
ролик 12, перемещает плунжер управляЕОщего золотника 9 вверх, сообпдая напорную магистраль с нижней полостью гидроцилиндра 2, а верхнюю - со сливом. Шток гидроцилиндра 2 перемещается вверх до тех пор, пока
на ролике 8 не создается первоначальный угол перегиба а, при котором плуижер управляющего золотника 9 занимает нейтральное положение и далькейщее неремещение щтока гндроцилиндра 2 прекращается.
При перемещении сходящей с барабана лебедки 5 ветви ваера 13 вниз, ианример на угол у2, процесс происходит так, как было описано выше. Таким образом, при любых перемещениях
ваера 13 как в горизонтальной, так и в вертикальной плоскостях угол перегиба его на ролике 8 остается постоянным и, следовательно, во всех случаях усилие, воздействующее на силоизмерительный датчик 1, является величиной, пропорциональной натяжению ваера.
По истечении времени растормаживания
релейный блок 33 снимает питание с катушки
золотника с управлением от электромагнита
23. При этом тормозные тумбы 24 разобщаются с опорной магистралью и сообщаются со сливом, п под действием тормозных пружин 29 происходит затормаживание барабанов траловой лебедки 5.
Предмет изобретения
Устройство для контроля нагрузки на ваерах и автоматического растормаживания траловой лебедки, содержащее силоизмеритель65 пый датчик, установленный на подвижной
платформе с роликом, взаимодействующим с ваером, электроизмерительную схему и гидропривод, отличающееся тем, что, с целью повыщения точности измерения усилия на ваерах, на подвижной платформе между барабаном лебедки и роликом закреплен золотник
со щтоком регулируемой длины и опорным роликом на конце штока, управляющий гидроцилиндром, установленным на каретке ваероукладчнка лебедки, и взаимодействующий своим щтоком с силоизмерительным датчиком.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО АВАРИЙНОГО РАСТОРЛ1АЖИВАНИЯ ТРАЛОВОЙ ЛЕБЕДКИ | 1973 |
|
SU363652A1 |
| ^ГП• ^1* f | 1973 |
|
SU379525A1 |
| АВТОМАТИЧЕСКОЕ РАСТОРМАЖИВАЮЩЕЕ УСТРОЙСТВО | 1969 |
|
SU244588A1 |
| Установка для формирования скирд | 1974 |
|
SU519162A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА ОРУДИЙ ЛОВА | 1972 |
|
SU426635A1 |
| ТРАЛОВАЯ ЛЕБЕДКА | 1970 |
|
SU285409A1 |
| Гидропривод крана-трубоукладчика | 1970 |
|
SU802170A1 |
| Ваероукладчик | 1980 |
|
SU971188A1 |
| УСТРОЙСТВО для ПОДЪЕМА И СПУСКА ТРАЛА НА СУДАХ С КОРМОВЫМ ТРАЛЕНИЕМ | 1968 |
|
SU210557A1 |
| Устройство управления пелагическим тралом | 1983 |
|
SU1194345A1 |

31 21 2 32
Отклонение 6Se,ox
