Изобретение относится к способам испытаний и контроля цифровых систем управления и их элементов.
Целью изобретения является повышение точности контроля.
В основу предлагаемого способа автоконтроля взят оригинальный физический принцип возбуждения колебаний в цифровых системах автоматического управления (САУ). Как правило, входные и выходные координаты объекта управления цифровой системы имеют непрерывную форму, поэтому в цифровых САУ осуществляется временная дискретизация - квантование непрерывных сигналов по времени в устройстве сопряжения объекта с цифровой системой управления (аналого-цифровом преобразователе), т.е. переход от аналоговой к цифровой форме выходного сигнала, и обратный переход на входе - в цифроаналоговом преобразователе. Современные цифровые системы допускают широкий диапазон регулируемого изменения частоты данного квантования.
Учитывая, что увеличение периода квантования Т в системе неизбежно приводит к общей потере устойчивости, и то, что критическое значение периода квантования Т, при котором это происходит, жестко связано со значениями всех параметров системы, предлагается использовать это свойство цифровых САУ для контроля, а величину Т - в качестве контролируемого параметра. Нарастание амплитуды колебаний в цифровом САУ при относится к явлению параметрического резонанса. Изменяющимся параметром является коэффициент усиления импульсного элемента в устройстве фиксации уровня управляющего сигнала, равный нулю в разогнутом состоянии и единице в замкнутом. Период колебаний этого параметра равен периоду квантования. Независимость факта наблюдения параметрического резонанса в цифровых САУ от вида объекта управления (как по его природе - механической, электрической и др, так и по виду его описания - передаточная
Os
ел
Јь Ч
со го
функция, структурная схема, зависимость вход-выход и пр.) и использование для функций контроля блоков, непосредственно входящих в цифровую систему, позволяют в значительной степени унифицировать процедуру контроля. Повышение точности достигается за счет независимости контролируемой величины Т от точности задания входного сигнала системы в режиме контроля, Вычисление контрольной характеристики Т осуществляется практически со сколь угодно малой погрешностью, которая определяется только величиной изменения периода квантования А в системе за один шаг контроля, Величина Д определяет доверительный интервал фиксации значения контролируемого параметра, так как последнее определяется по формуле
Т Тр+ кхД,
где Тр - рабочее значение периода квантования в контролируемой системе;
к - количество шагов контроля, потребовавшихся для возбуждения в системе параметрического резонанса.
Регистрация возникших параметрических колебаний по величине управляющего сигнала на входе объекта управления путем сравнения с расчетным уровнем Un позволяет поддерживать любую наперед заданную точность вычисления Т за счет определения Un и времени Ti каждого шага контроля в зависимости от величины Лис учетом основных (неменяющихся) свойств контролируемой системы. Для формирования решения об исправности системы фиксированная величина контролируемого параметра сравнивается с эталонным значением, определенным для заведомо исправной системы. Таким образом, при построении процедуры (алгоритма) контроля по предлагаемому способу можно выделить три основных этапа - расчет необходимых констант, определение эталонного значения контролируемого параметра в заведомо исправной системе и этап непосредственно контроля.
Величины Д, TI и Un определяются по таким паспортным данным контролируемой цифровой САУ, как а- максимальное перерегулирование в системе, т - время регулирования, собственная частота системы, или другим заданным параметрам интегрального характера, Известно, что в системах 1-3 порядка и в большинстве цифровых САУ более высокого порядка (в силу того, что процедуры их синтеза сводятся, как правило, к построению упрощенных аналогов более низкого порядка, отвечающих заданным показателям качества) при непрерывном (теоретически) или достаточно мелкодискретном (на практике) изменении периода квантования на границе устойчивости реэлизуются только периодические движения, соответствующие первому и второму параметрическим резонансам. Кроме того, анализ цифровых САУ на базе теории параметрического резонанса показывает,
что зоны неустойчивости, соответствующие четным резонансам, полностью поглощаются зонами неустойчивости нечетных резо- нансов, и соответствующие им Т-периодические движения не являются реализуемыми.
Таким образом, технически реализуемым режимом при выходе цифровой САУ на границу устойчивости является 2Т-периоди- ческое движение, соответствующее основному (первому) параметрическому резонансу. В то же время внесение неограниченного запаздывания в систему при фиксации уровня управляющих сигналов гарантирует наличие этого режима для любой цифровой системы. Связь между величинами Т, ш и т описывается в этом случае соотношениями
Т л/ш , т 4л /а)(1)
Определяя Д как максимально допустимый уход контролируемого параметра Т от эталонного значения Т3+ и связывая его с .допустимым уходом одного из паспортных параметров качества, например т, получим
А (г + Дт)-Тэ.(2)
Величина Ti определяет время полного затухания переходного процесса в системе, вызванного входным воздействием UB, и составляетTi 3 г.(3)
С учетом паспортных ограничений на амплитуду входного сигнала оптимальное значение последней рассчитывается как
a (V°) (ai 92).(4)
где ai - максимально допустимая величина сигнала на входе САУ,
32 - порог нечувствительности на входе.
Учитывая инерционные свойства конт- ролируемой системы, длительность входного воздействия определяется как
t(UBH,5Ti.(5)
Расчетная или экспериментально снятая зависимость 0(т) служит для определения ип аСТрасч - Д).(6)
Соотношения (2), (3) и (6) определяют значения исходных констант Д , Ti и Un для алгоритма контроля, а (4) и (5) - параметры входного воздействия.
Подавая сигнал UB на вход заведомо исправной системы на каждом шаге изменения Т от значения Тр на величину Д амплитуду сигнала на выходе цифроанало- гового преобразователя сравнивают с допустимым уровнем ип в течение промежутка времени Ti, и в случае превышения фиксируют значения п х Д где п - количество шагов, потребовавшихся для возбуждения системы.
В режиме непосредственно контроля действия по возбуждению цифровой САУ повторяются аналогично предыдущему этапу. Определенное значение Т Tp+k x Л, где k - количество шагов, необходимое для возбуждения системы, сравнивается с Тэ+ Система считается неисправной, если I I Д (или I n-k I 1), так как в этом случае уход паспортного параметра качества превышает допустимое значение.
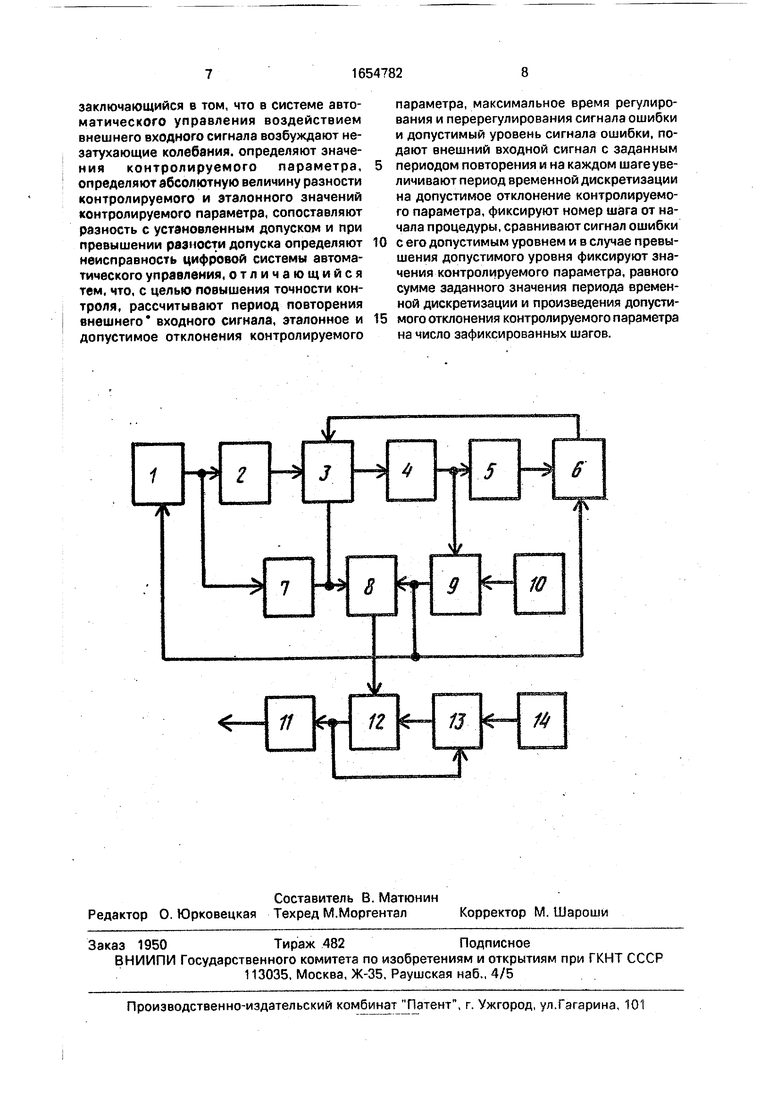
На чертеже представлен пример схемы реализации устройства для осуществления способа.
На схеме обозначены генератор 1 импульсов, формирователь 2 входного сигнала, цифровой блок 3 контролируемой САУ, цифроаналоговый преобразователь 4, объект 5 управления, аналого-цифровой преобразователь б, счетчик 7 приращений, ключ 8, блок 9 сравнения, источник 10 напряжения, многоразрядный элемент ИЛИ 11, блок 12 вычитания (в двоичном коде), эталонный счетчик 13 и переключатель 14 режимов
Устройство работает следующим cf-pa- зом.
До запуска устройства в режиме контроля или определения эталонного значения контролируемого параметра ь источнике 10 выставляется расчетное напряжение Un, в блок 3 заносится значение Д а преобразователи 4 и 6 находятся в исходном состоянии . На этапе определения Тэ переключатель 14 находится во включенном состоянии, и сигнал с его выхода, поступая на управляющий вход счетчика 13, открывает его для записи нового значения, одновременно обнуляя его содержание. Включение остальной части схемы осуществляется запуском генератора 1.
Импульсы с генератора 1 с периодом Ti поступают на входы счетчика 7 и формирователя 2. на выходе которого формируется сигнал UB, поступающий на вход блока 3. На выходе счетчика 7 формируется сигнал, несущий информацию о количестве импульсов, пришедших с генератора 1 с момента включения. Он подается в блок 3 на вход управления величиной периода квантования, в результате чего значение Т формируется в соответствии с законом х Д где I - текущее значение на выходе счетчика 7. Одновременно сигнал со счетчика 7 поступает на вход ключа 8. С выхода блока 3
управляющий сигнал через преобразователь 4 поступает на вход объекта 5 и первый вход блока 9. Сигнал с выхода объекта 5 преобразуется в цифровой сигнал и с вычисленным периодом квантования Т обрабатывается в блоке 3, поступая на его вход и замыкая таким образом обратную связь в САУ. На второй вход блока 9 поступает сигнал ипс выхода источника 10 для сравнения его с сигналом из преобразователя 4. В том
случае, если выходное напряжение с преобразователя 4 превышает по абсолютному значению уровень, заданный источником 10, что соответствует возникновению в схеме незатухающих колебаний, на выходе блока 9 формируется управляющий сигнал на замыкание ключа 8. В этом случае сигнал с выхода счетчика 7 поступает на первый вход блока 12, второй вход которого обнулен, как и содержание счетчика 13, к выходу которого он подключен. Таким образом, значение п из счетчика 7 с выхода блока 12 записывается в счетчик 13. Для приведения контролируемой системы (САУ) в исходное невозмущенное состояние замкнутый контур САУ размыкается сигналом с выхода бпска 9 за счет отключения преобразователя 6. Этим же сигналом отключается ечера- тор 1 и обнуляется счетчик 7.
На этапе непосредственно контроля переключатель 14 выключен. При этом счетчик 13 работает в режиме выдачи содержания, и цифровой сигнал, соответствующий значению п. поступает на второй вход блока 12. Остальная часть схемы устройства работает
так же, как на этапе определения эталонного значения Тэ, т.е. по превышению сигналов с выхода преобразователя 4 расчетного уровня Un с выхода источника 10 осуществляется передача цифрового сигнала, несущего значение k. на первый вход блока 12. Двоичный код разности, сформированный на выходе блока 12, за исключением сигналов нулевого и знакового разрядов, поступает на многоразрядный вход элемента ИЛИ 11.
При наличии на входах элемента ИЛИ 11 хотя бы одного сигнала единичного уровня формируется единичный сигнал - сообщение о неисправности системы. В противном случае сигнал на выходе элемента ИЛИ 11 нулевой, и система считается исправной.
Формула изобретения
Способ автоматического контроля цифровых систем автоматического управления,
заключающийся в том, что в системе автоматического управления воздействием внешнего входного сигнала возбуждают незатухающие колебания, определяют значения контролируемого параметра, определяют абсолютную величину разности контролируемого и эталонного значений контролируемого параметра, сопоставляют разность с установленным допуском и при превышении разности допуска определяют неисправность цифровой системы автоматического управления, отличающийся тем. что, с целью повышения точности контроля, рассчитывают период повторения внешнего входного сигнала, эталонное и допустимое отклонения контролируемого
5
параметра, максимальное время регулирования и перерегулирования сигнала ошибки и допустимый уровень сигнала ошибки, подают внешний входной сигнал с заданным периодом повторения и на каждом шаге увеличивают период временной дискретизации на допустимое отклонение контролируемого параметра, фиксируют номер шага от начала процедуры, сравнивают сигнал ошибки с его допустимым уровнем и в случае превышения допустимого уровня фиксируют значения контролируемого параметра, равного сумме заданного значения периода временной дискретизации и произведения допустимого отклонения контролируемого параметра на число зафиксированных шагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования температуры | 1988 |
|
SU1645945A1 |
| Устройство для автоматического контроля системы управления тиристорным преобразователем | 1988 |
|
SU1613372A1 |
| Устройство для линеаризации функций | 1979 |
|
SU864307A1 |
| Устройство для функционального контроля систем управления | 1983 |
|
SU1145323A1 |
| АВТОМАТИЗИРОВАННАЯ УСТАНОВКА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ СПЕЦИАЛЬНОГО ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ АВТОТОПЛИВОЗАПРАВЩИКОВ | 2019 |
|
RU2718713C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| ЦИФРОВОЙ АВТОМАТ КОНТРОЛЯ ЛИНЕЙНЫХ ЧЕТЫРЕХПОЛЮСНИКОВ | 1971 |
|
SU317068A1 |
| СИСТЕМА АКТИВНОГО ЭЛЕКТРОМАГНИТНОГО МОНИТОРИНГА СЕЙСМОАКТИВНЫХ ЗОН ЗЕМНОЙ КОРЫ | 2008 |
|
RU2408037C2 |
| Устройство для автоматического измерения дрейфа цифровых вольтметров | 1984 |
|
SU1166303A1 |
| Устройство для контроля системы автоматической стабилизации параметров | 1986 |
|
SU1374248A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для контроля цифровых систем и их элементов. Цель изобретения - повышение точности контроля. Цель достигается за счет использования в качестве контролируемого параметра критического периода временной дискретизации цифровой системы автоматического управления. 1 ил.
| Способ определения частоты резонанса подвижной системы язычкового реле | 1983 |
|
SU1187152A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1984 |
|
SU1191888A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
