1
Изобретение относится к измерительной аппаратуре для контроля машин, а именно к устройствам контроля циклических погрешностей зубофрезерных станков.
Известны индуктивные и индуктивно-трансформаторные сейсмические датчики для контроля погрешности кинематических цепей, содержащие инерционный ротор, подвешенный на крестообразном шарнире, состояш,ем из плоских пружин, имеюшие индуктивный или индуктивно-трансформаторный преобразователь для выдачи электрического сигнала, пропорционального углу поворота ротора, токосъемник, установленный с возможностью его врашения вокруг оси ротора, систему демпфирования последнего, трансформаторный преобразователь для выдачи электрического сигнала, пропорционального поворотам ротора, имеюш,ий незамкнутый сердечник с боковыми ветвями, и электромагнитные арретиры с якорями.
Однако такие датчики не обеспечивают контроля ногрешности кинематических цепей объектов различных типоразмеров.
Предлагаемый датчик отличается от известных тем, что боковые ветви сердечника выполнены скошенными, трансформаторы установлены параллельно ротору и обраш,ены магнитопроводами к оси его враш,ения, а каждый арретир выполнен в виде электромагнита, якорь которого подвешен на плоской пружине и взаимодействует с ротором при его фиксации.
Этим обеспечивается контроль погрешности кинематических цепей объектов различных типоразмеров.
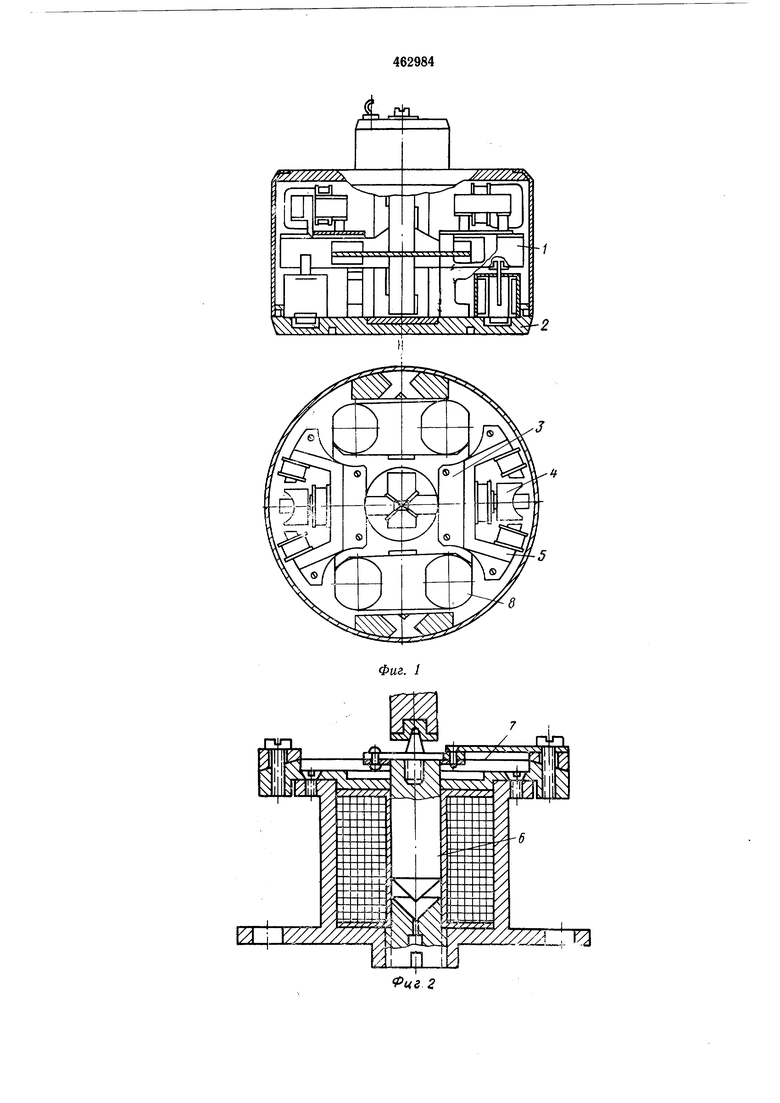
На фиг. 1 изображен предлагаемый сейсмический датчик; на фиг. 2 - электромагнитный арретир в поперечном разрезе.
Сейсмический датчик (фиг. 1) состоит из инерционной массы (ротора) 1, соединенного с корпусом (статор) 2 посредством низкочастотного крестообразного пружинного шарнира 3. На концах инерционного ротора 1 закреплены якоря 4, находяшиеся в межнолюсном пространстве индуктивно-трансформаторных преобразователей 5. В нижней части сейсмнческого датчика по краям ротора находятся электромагнитные арретиры (фиг. 2), которые состоят из втяжного электромагнита, якорь 6 которого подвешен на плоской пружине 7. В верхней части датчика находится токосъемпнк со скользяш.ими контактами (не показан).
Датчик имеет демпфируюш,ую систему с постоянными магнитами 8 для успокоения свободных колебаний ротора 1. Датчик работает следуюш,им образом. Сейсмический датчик устанавливается на
враш,аюш,ийся с определенной скоростью
объект измерения, например на стол зубофрезерного станка. При этом инерционный ротор 1 приобретает усредненную постоянную скорость вращения стола. Все отклонения от этой скорости передаются объектом контроля статору 2, а через него - и индуктивно-трансформаторным преобразователям 5. Колебания статора 2 относительно инерционного ротора 1 и связанных с ним якорей 4 индуктивнотрансформаторного преобразователя вызывают их перемещения в межполюсном пространстве. В результате этого появляется сигнал, пропорциональный относительному угловому смещению инерционного ротора 1.
Ветви магнитопровода индуктивно-трансформаторного преобразователя выполнены под некоторым углом к оси симметрии статора, что дает возможность увеличить диапазон измеряемых перемещений на 10% в отличие от прямоугольной формы магнитопровода при сохранении цилиндрической формы корпуса сейсмического датчика.
Электромагнитные арретиры стопорят инерционный ротор датчика, что предохраняет от поломки пружинного шарнира 3 и деформации индуктивно-трансформаторных преобразователей 5 от внезапных толчков при транспортировке датчика.
Предмет изобретения
Сейсмический датчик для контроля погрещности кинематических цепей, содержащий инерционный ротор, крестообразный шарнир из плоских пружин, на котором подвешен ротор, токосъемник, установленный с возможностью его вращения вокруг оси ротора, систему демпфирования последнего, трансформаторный преобразователь для выдачи электрического сигнала, пропорционального поворота ротора, имеющий незамкнутый сердечник с боковыми ветвями, и электромагнитные арретиры с якорями, фиксирующими положение ротора в нерабочем положении, отличающийся тем, что, с целью контроля погрешности кинематических цепей объектов различных типоразмеров, боковые ветви сердечника выполнены скошенными, трансформаторы установлены параллельно ротору и обращены магнитопроводами к оси его вращения, а каждый арретир выполнен в виде электромагнита, якорь которого подвешен на плоской пружине и взаимодействует с ротором при его фиксации.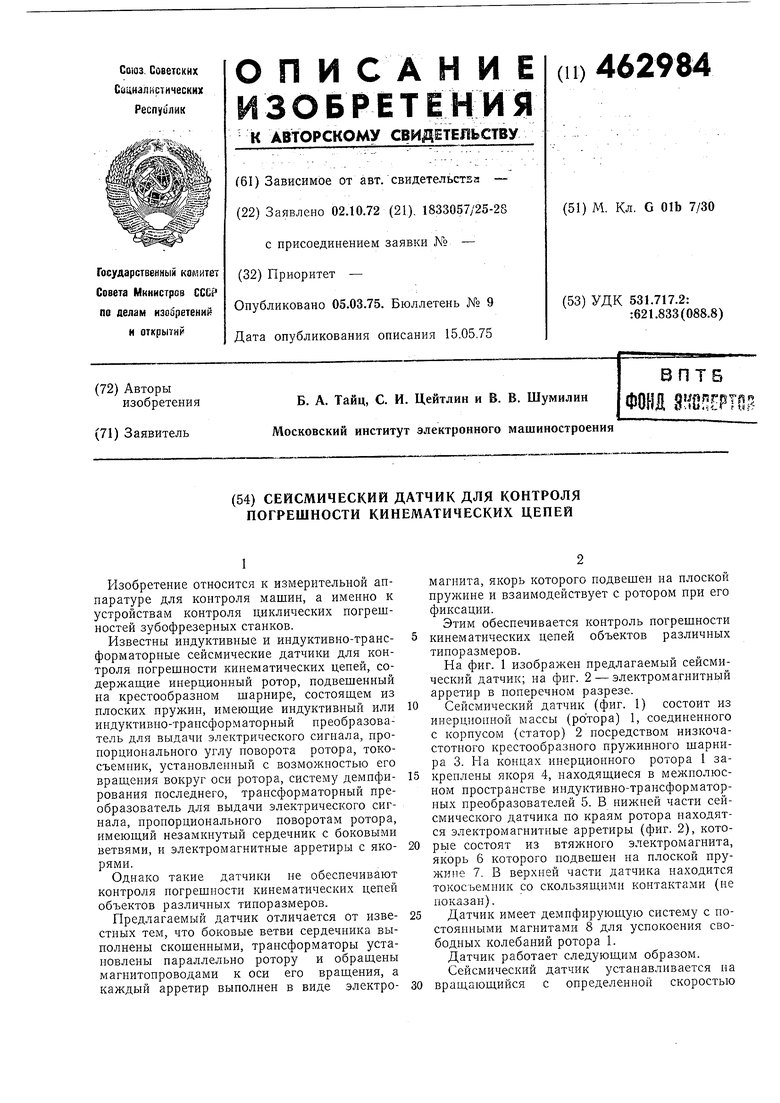
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМИЧЕСКИЙ ПРИБОР ДЛЯ КОНТРОЛЯ | 1969 |
|
SU249134A1 |
| Мареограф открытого моря | 1979 |
|
SU838377A1 |
| УСИЛИТЕЛЬ МАГНИТНОГО ПОТОКА И СИЛОВЫЕ ЭЛЕКТРОТЕХНИЧЕСКИЕ УСТРОЙСТВА НА ЕГО ОСНОВЕ | 2000 |
|
RU2201001C2 |
| КИНЕМАТИЧЕСКАЯ ОПОРА СЕЙСМОСТОЙКОГО ЗДАНИЯ ИЛИ СООРУЖЕНИЯ | 1993 |
|
RU2049890C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1995 |
|
RU2125760C1 |
| Трехкомпонентные магнитоэлектрические весы | 1975 |
|
SU524977A1 |
| ДАТЧИК ИЗМЕРЕНИЯ АЗИМУТАЛЬНЫХ РАЗВОРОТОВ | 1977 |
|
SU1840393A2 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Инклинометр | 1991 |
|
SU1800014A1 |
| Устройство для регулирования светового потока в кинокопировальном аппарате | 1983 |
|
SU1126921A1 |