При регулировании пропеллерных водяных турбин с поворотными рабочими лопастями применяются гидравлические сервомоторы, управляемые с помощью золотника специальным плоским кулачным механизмом, так называемым комбинатором, который приводится в действие от регулирующего кольца направляющего аппарата. Профиль кулака комбинатора подбирается таким образом, чтобы был обеспечен возможный максимальный коэфициент полезного действия при различных нагрузках турбины для некоторого определенного напора. Но при перемене напора и при сохранении прежних оборотов турбины условия регулирования меняются, благодаря чему и кривую комбинатора нужно было бы тоже изменять. Обычно кривую рассчитывают на некоторый нормальный напор и идут на снижение коэфициента полезного действия при других напорах или применяют механизм, имеющий два переставных кулака, рассчитанные на обслуживание двух интервалов напора. Аналогичные конструкции привода применимы и для насосных колес.
Предлагаемое приспособление или комбинатор для автоматического поворота лопастей пропеллерных турбин или насосов имеет ту особенность, что вместо плоского кулачного механизма применен комбинатор, заключающий пространственный клин, имеющий фасонную поверхность с наклоном в двух взаимно перпендикулярных направлениях, на которую опирается ролик передаточного механизма к золотнику. Положение ролика на поверхности комбинатора устанавливается в зависимости от открытия направляющего аппарата турбины с одной стороны и от изменения величины напора с другой. При этом поверхность подобрана таким образом, что при осуществлении двойного привода к комбинатору достигается регулирование с наибольшим коэфициентом полезного действия при переменном напоре.
Особое удобство в применении этого механизма представляет собою конструкция комбинатора, выполненная в виде отдельной колонки, устанавливаемой на полу машинного зала.
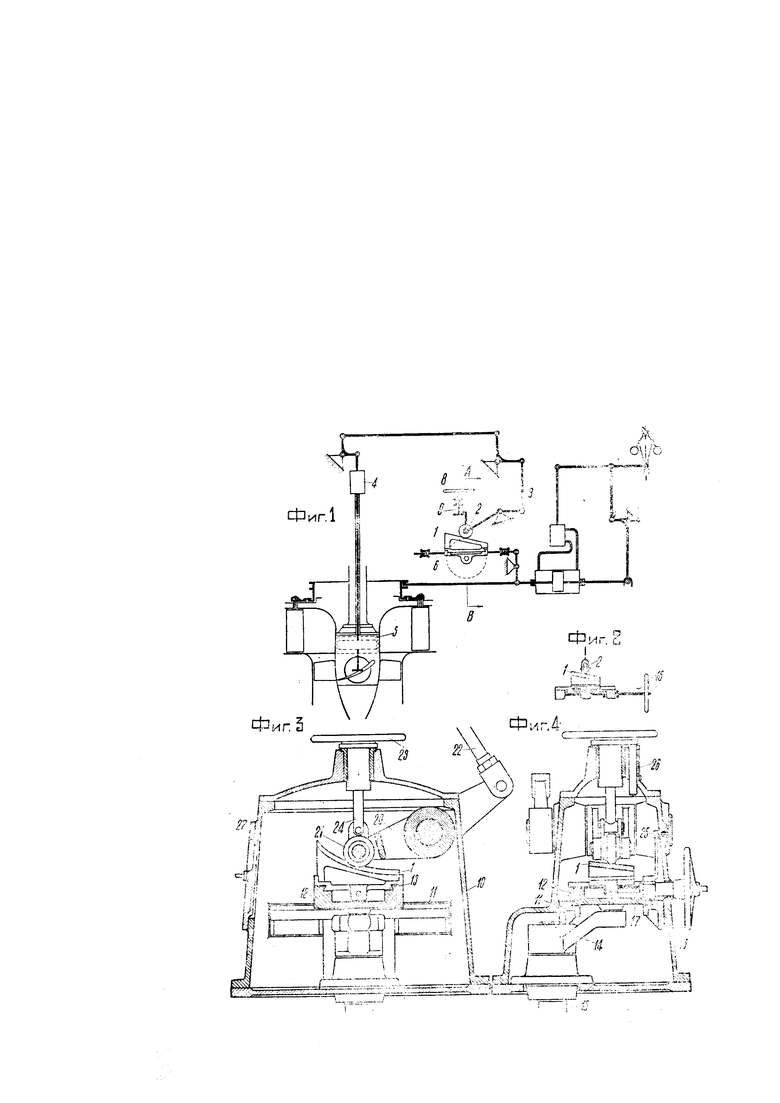
На чертеже фиг. 1 изображает схему установки приспособления или комбинатора для автоматического поворота лопастей пропеллерных турбин; фиг. 2 - разрез по АВ на фиг. 1; фиг. 3 - вертикальный разрез колонки комбинатора в другой форме выполнения; фиг. 4 - то же в плоскости, перпендикулярной к фиг. 3.
К клину 1 (фиг. 1) комбинатора прижимается ролик 2, укрепленный на конце двухплечего рычага, на другой конец которого действует тяга 3, идущая к золотнику 4, предназначенному для управления сервомотором 5 рабочего колеса. Клин 1 приводится в движение от регулирующего кольца направляющего аппарата, как показано схематично тягой 6. Вследствие этого ролик 2, катясь по клину 1, поворачивает рычаг и воздействует на золотник 4. При изменении напора клин 1 (фиг. 2) перемещается в перпендикулярном направлении на нужную величину вручную с помощью маховичка 16, как показано на схеме, или с помощью электромотора со щита. Клин 1 может перемещаться и автоматически от прибора, регистрирующего напор установки в данный момент. Для пуска турбины, а также для ручного привода к золотнику служит ограничитель закрытия, схематично представленный в виде маховичка 8 с валиком 9, захватывающим за выступ двуплечего рычага.
Форма пространственного комбинатора, выполненного в отдельной колонке, представлена на фиг. 3, 4. Станина 10 имеет направляющие 11, несущие на себе супорт 12, снабженный, в свою очередь, направляющими 13, по которым перемещается самый пространственный клин 1 комбинатора, снабженный наклонными поверхностями в двух взаимно перпендикулярных направлениях. Супорт 13 механически, с помощью рычага 14 и вала 15, связан с регулирующим концом направляющего аппарата. Клин 1 передвигается вручную маховичком 16 с помощью ходового винта 17, имеющего на выступающем конце справа деления, соответствующие различным напорам.
Маховичок выходит из колонки через специальную прорезь в ней, в которой движется поступательно при регулировании турбины Двуплечий рычаг 20, шарнирно укрепленный на колонке, на левом конце имеет ролик 21, а правым соединен тягой 22 с золотником, не показанным на чертеже. Ограничителем закрытия служит маховичок 23, входящий на резьбе в колонку комбинатора. При вывертывании маховичка он захватывает головку тяги 24, идущей от рычага 20, и поворачивает рычаг в направлении, соответствующем открытию лопаток рабочего колеса. При этом ролик 21 отходит от клина 1 комбинатора.
Кроме того, колонка снабжена указателем положения направляющего аппарата, для чего служит стрелка 25, прикрепленная к супорту 12 и выступающая из колонки в специальной прорези, а также указателем для установки лопаток с помощью маховичка 23. Указатель выполнен в виде кольца 26 со стрелкой, перемещающегося поступательно вверх и вниз при винтовом перемещении маховичка 23.
Для выема клина 1 комбинатора в колонке 10 устроен лаз 27. Клин комбинатора может быть вынут при работающей машине, когда ролик 21 рычага 20 оттянут маховичком вверх.
1. Приспособление или комбинатор для автоматического поворота лопастей пропеллерных турбин или насосов, связанный с одной стороны с направляющим аппаратом турбины или насоса, а с другой - с золотником, служащим для управления сервомотором рабочего колеса, отличающийся применением взамен обычного устройства комбинатора, состоящего из плоского кулачного механизма-комбинатора, заключающего клин, позволяющий своим сдвигом устанавливать лопасть в наперед заданном положении, в зависимости от открытия направляющего аппарата и измененной величины напора с целью сохранения возможно наибольшего коэфициента полезного действия.
2. Форма выполнения приспособления или комбинатора по п. 1, отличающаяся тем, что клин 1 его (фиг. 3 и 4) снабжен наклонными поверхностями в двух взаимно перпендикулярных направлениях, предназначен для воздействия через ролик 21 на передачу к золотнику рабочего колеса и приводится в движение, с одной стороны, автоматически от направляющего аппарата турбины, а с другой - вручную маховичком 16, служащим для установки клина на различные напоры.
