Изобретение относится к способам адаптивного управления активной мощностью и частотой гидроагрегата (ГА) с поворотно-лопастной турбиной (ПЛТ) и может использоваться в системах автоматического управления ГА.
Известен способ управления активной мощностью и частотой ГА с ПЛТ, заключающийся в изменении величины открытия направляющего аппарата (НА) и угла установки лопастей рабочего колеса турбины (РК) путем формирования и подачи управляющих воздействий на сервомоторы механизмов открытия направляющего аппарата и разворота лопастей РК. (Кривченко Г.И. Гидравлические машины: Турбины и насосы. - М.: Энергия, 1978 г. - С.119-128). Управляющие воздействия на сервомоторы механизмов открытия НА и разворота лопастей РК формируют по алгоритму, который составляют с применением модели ГА, содержащей комбинаторную зависимость (КЗ) и основное энергетическое уравнение гидроагрегата с ПЛТ. Управляющее воздействие на сервомотор механизма разворота лопастей РК формируют по комбинаторной зависимости (зависимости требуемого угла установки лопастей от статического напора и величины открытия НА турбины). КЗ определяют расчетно-графическим методом, который основан на выявлении режимов работы турбины с максимальными значениями к.п.д. Для этого при выполнении испытаний для разных напоров и углов разворота лопастей РК определяют серию частных пропеллерных характеристик (ПХ) поворотно-лопастной турбины: зависимостей к.п.д. от расхода воды через турбину при фиксированных значениях напора и угла разворота лопастей.
Однако этот способ не применяют из-за быстрого механического разрушения расходомеров потоком воды. Комбинаторные зависимости штатных систем автоматического управления (САУ) активной мощностью и частотой определяют приближенным расчетно-графическим методом, в котором используют расчетные значения расхода воды через турбину и индексного к.п.д. (Турбины гидравлические. Методы натурных испытаний. ГОСТ 28842-90. - М., 1991 г.). Для этого при выполнении натурных энергетических испытаний ГА создают стационарные режимы с разными величинами открытия НА при каждом фиксированном значении угла разворота лопастей РК и каждом напоре. В этих режимах измеряют статический напор Н, величину открытия НА а, угол разворота лопастей РК φ, активную мощность Ра, перепад давления в расходомерном створе спиральной камеры (в дальнейшем - перепад давления), вычисляют расчетное значение расхода воды

и индексный к.п.д.

где: Δр - перепад давления; b - показатель степени, величину которого для бетонных спиральных камер прямоугольного сечения выбирают из диапазона (0,48÷0,52); K - параметр, величину которого определяют методом подобия по заводской характеристике; ηг - к.п.д. генератора. Вычерчивают графики частных ПХ турбины, строят огибающую этих графиков и по точкам касания огибающей с частными ПХ определяют точки КЗ главной универсальной характеристики, обеспечивающей максимальный индексный к.п.д. Затем методом гидродинамического подобия всех элементов проточного тракта модели ПЛТ и реальной турбины вычисляют точки КЗ реальной турбины.
Этот способ-аналог обладает следующими основными недостатками:
1) Расчетно-графический метод определения комбинаторной зависимости содержит неконтролируемые методические и инструментальные погрешности, так как обеспечить и проверить подобие гидродинамических процессов, происходящих в макете ПЛТ и в реальной турбине, нельзя. А формулы (1) и (2) ни теоретически, ни экспериментально не обоснованы.
2) При изменении величины открытия НА при фиксированном угле разворота лопастей абсолютная скорость потока воды на выходе из РК, изменяясь и по величине, и направлению (из-за вращения РК), будет отклоняться от направления «нормальный выход из РК» (параллельного продольной оси турбины). Турбулентный поток воды, ударяясь о стенки отводящей трубы под углом, увеличивающимся при увеличении открытия НА, создает вибрацию отводящей трубы и других деталей ГА. Отраженная от стенки струя воды, перемещаясь с завихрениями, уменьшает реальное проходное сечение отводящей трубы и создает дополнительные гидравлические потери мощности. Поэтому при увеличении открытия НА мощность и к.п.д. турбины будут вначале увеличиваться до своих максимальных значений, а затем начнут уменьшаться из-за опережающего роста гидравлических потерь. Значения угла разворота лопастей и величины открытия НА, обеспечившие в этих экспериментах максимальные значения нормированного (индексного) к.п.д., считают точками оптимальной КЗ. Но гидравлические потери в турбине с САУ, реализующей эту КЗ, могут значительно превышать гидравлические потери в этой же турбине при тех же величинах открытия НА в режимах с направлением потока воды «нормальный выход из РК». Экспериментальные исследования подтверждают этот вывод. При выполнении энергетических испытаний гидроагрегатов Волжской ГЭС с помощью ручного управления (с отключенным комбинатором) были получены режимы, отличающиеся на 2÷6 градусов по углу разворота лопастей от штатной КЗ при одинаковых величинах открытия НА. Штатные датчики САУ зафиксировали в этих режимах увеличение активной мощности на 6÷12 МВт (Технический отчет по натурным энергетическим испытаниям гидроагрегатов №3 и №4 Волжской ГЭС. - М.: Фирма «ОРГРЭС», 2011 г.).
В качестве прототипа принят способ адаптивного управления активной мощностью гидроагрегата с ПЛТ (Патент на изобретение RU №2468246 C2, опубликовано 27.11.2012, бюл. №33), в котором частично устранены недостатки штатной САУ. Этот способ обеспечивает минимальную среднеквадратическую погрешность управления активной мощностью гидроагрегата при минимальном расходе воды и минимальной мощности, затраченной на управление; снижает динамические нагрузки на основные узлы турбины; уменьшает износ исполнительных механизмов системы управления; уменьшает объем пуско-наладочных работ при вводе гидроагрегата в эксплуатацию после очередного ремонта.
Технический результат достигают за счет: измерения в процессе управления перепада давления в расходомерном створе спиральной камеры; применения адаптивной САУ активной мощностью с обучаемой моделью ГА, содержащей основное энергетическое уравнение ПЛТ и комбинаторную зависимость; формирования управляющих воздействий по алгоритму, который получают минимизацией функционала обобщенной работы (ФОР) с помощью принципа максимума. Из пуско-наладочных работ, выполняемых при вводе ГА в эксплуатацию после очередного ремонта, исключают специальные испытания, предназначенные для определения параметров системы управления.
Переменные состояния и параметры модели ГА определяют в процессе управления активной мощностью с помощью рекуррентного метода наименьших квадратов (МНК), в котором используют результаты измерений активной мощности, перепада давления, угла разворота лопастей РК и величины открытия НА. Управляющие воздействия формируют по алгоритму, который получают минимизацией ФОР с помощью принципа максимума с учетом ограничений, заданных моделью ГА, и ограничений на величины скоростей открытия НА и разворота лопастей РК:
 ,
,
заданных заводскими характеристиками для предотвращения гидравлических ударов где: Δа доп - допустимая величина открытия НА за промежуток времени τ; Δφдоп - допустимая величина разворота лопастей рабочего колеса за промежуток времени τ.
ФОР образуют из нормированной суммы квадратов невязки между требуемыми и реализованными значениями активной мощности, перепада давления и мощности, затраченной на управление сервомоторами. При этом система адаптивного управления формирует входные воздействия на сервомоторы исполнительных механизмов, которые поворачивают лопатки НА и лопасти РК в направлении их оптимальных положений. Алгоритм управления активной мощностью в процессе эксплуатации автоматически адаптируется к индивидуальным особенностям каждого гидроагрегата. Поэтому из пуско-наладочных работ, выполняемых при вводе ГА в эксплуатацию после очередного ремонта, исключают специальные испытания, предназначенные для определения параметров системы управления.
Прототип имеет следующие основные недостатки. В алгоритме формирования управляющих воздействий используют измеренные значения перепада давления в расходомерном створе спиральной камеры, которые содержат высокочастотные турбулентные пульсации давления, достигающие 30% от значений математического ожидания перепада давления. Поэтому и управляющие воздействия будут содержать колебания, что в свою очередь приведет к колебаниям давления в золотниках и силовых цилиндрах сервомоторов, повышенному износу деталей сервомоторов, появлению дополнительных гидравлических потерь в турбине, увеличению вибрации и уменьшению надежности работы гидроагрегата.
Техническим результатом заявленного изобретения является уменьшение гидравлических потерь мощности и вибрации, увеличение к.п.д. и надежности работы гидроагрегата.
Технический результат достигают за счет того, что в предлагаемом способе управления, в отличие от прототипа, комбинаторную зависимость определяют в режимах работы ГА с максимальными значениями активной мощности при минимальных величинах открытия НА и действующем напоре. Эти режимы формируют изменением угла разворота лопастей РК, создавая направление потока воды на выходе из РК параллельно продольной оси турбины («нормальный выход из рабочего колеса») при любой величине открытия НА и любом расходе. Потому турбулентный поток воды проскальзывает вдоль стенок отводящей трубы, создавая в любом режиме работы минимальные гидравлические потери и минимальную вибрацию отводящей трубы и других деталей ГА. Из-за уменьшения гидравлических потерь увеличивается к.п.д. турбины, а из-за уменьшения вибрации дополнительно увеличивается надежность работы гидроагрегата.
Сущность изобретения выражается в совокупности существенных признаков, достаточной для достижения указанного технического результата, которая включает:
признаки, совпадающие с признаками прототипа:
- управляют активной мощностью гидроагрегата изменением величины открытия направляющего аппарата и угла установки лопастей рабочего колеса турбины за счет формирования и подачи управляющих воздействий на сервомоторы механизмов открытия направляющего аппарата и разворота лопастей рабочего колеса;
- управляющие воздействия на сервомоторы формируют по алгоритмам, которые составляют с применением модели гидроагрегата, содержащей комбинаторную зависимость и основное энергетическое уравнение поворотно-лопастной турбины;
- переменные состояния и параметры модели гидроагрегата уточняют рекуррентным методом наименьших квадратов в процессе управления;
- управляющее воздействие на сервомотор механизма открытия направляющего аппарата формируют с помощью рекуррентного алгоритма адаптивного управления, который получают минимизацией функционала обобщенной работы с учетом ограничений, заданных моделью гидроагрегата и заводскими характеристиками;
признаки, отличающиеся от признаков прототипа:
- функционал обобщенной работы составляют в виде интеграла суммы квадратов четырех нормированных слагаемых: отклонения активной мощности гидроагрегата от требуемой мощности, отклонения частоты генерируемого тока от требуемой частоты, величины открытия направляющего аппарата и скорости изменения величины открытия направляющего аппарата;
- в математическую модель гидроагрегата включают уравнение динамики его ротора;
- комбинаторную зависимость определяют из условий достижения максимальных значений мощности турбины при любых величинах открытия направляющего аппарата и действующем напоре, которые обеспечивают изменением угла разворота лопастей рабочего колеса.
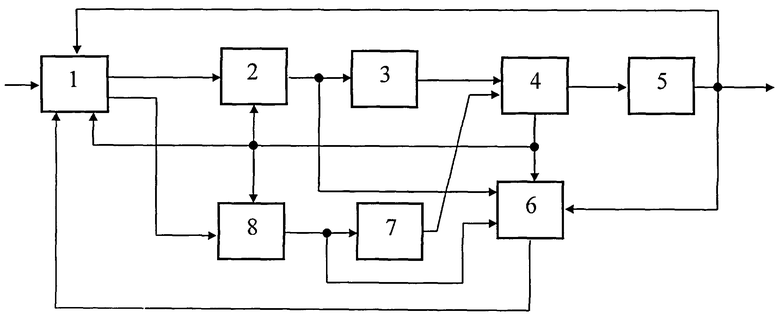
Сущность изобретения поясняет упрощенная блок-схема, изображенная на фигуре, где приняты следующие обозначения: 1 - блок формирования требуемых значений величины открытия НА и угла разворота лопастей РК; 2 - регулятор величины открытия НА; 3 - механизм открытия НА; 4 - турбина; 5 - генератор; 6 - блок обучения модели ГА; 7 - механизм разворота лопастей РК; 8 - регулятор разворота лопастей РК.
В заявленном способе управляют активной мощностью и частотой за счет изменения величины открытия НА и положения лопастей РК. Для этого в дискретные моменты времени tk=k·Δt, которые сменяют последовательно, формируют управляющие воздействия на сервомоторы механизмов открытия НА и разворота лопастей РК.
В начальный момент времени t0 формируют управляющее воздействие на сервомотор механизма открытия НА 3 с помощью регулятора 2, на вход которого подают сигнал рассогласования между требуемым Рmp(t0) и реализованным Pa(t0) значениями активной мощности гидроагрегата. Управляющее воздействие на сервомотор механизма разворота лопастей 7 в момент времени t0 регулятор 8 формирует по штатной комбинаторной зависимости. При этом используют параметры регулятора активной мощности и штатную КЗ, найденные по заводским характеристикам гидроагрегата и хранящиеся в блоке 1. Затем к блоку 1 системы управления подсоединяют блок 6 с обучаемой моделью ПЛТ. Модель ПЛТ содержит уравнение динамики ротора ГА

и основное энергетическое уравнение турбины, представленное в виде регрессионного уравнения, описывающего нелинейную зависимость момента движущих сил турбины Мдс(a(t), (φ(t)) от текущих значений величины открытия НА a(t) и угла разворота лопастей РК φ(t) при действующем напоре Н в момент времени t:

где: J - осевой момент инерции ротора; ω(t) - угловая скорость вращения ротора ГА; Мтp(t) - момент сил трения

fc - частота тока в электрической сети; f(t) - частота генерируемого электрического тока; L·(fc-f(t)) - крутящий (либо тормозящий) момент, создаваемый на валу генератора электрической сетью; ω0 - значение угловой скорости вращения ротора ГА, измеренное в начальный момент времени t0;
 ;
;
D1 - диаметр водовода на входе в РК; dвт - диаметр втулки РК; π≈3,142; Q(a(t), (φ(t),H) - расход воды через турбину при величине открытия НА a(t), угле разворота лопастей φ(t) и действующем напоре; α1(a(t)) - угол между вектором окружной скорости и вектором абсолютной скорости потока воды на входной кромке лопасти РК в расчетном сечении при величине открытия НА a(t); βр - расчетный угол установки лопастей РК; bj, qi,p, rl,ν - параметры, величины которых определяют при пусках, остановах и энергетических испытаниях ГА методом наименьших квадратов по результатам измерений в дискретные моменты времени tk угловой скорости вращения ротора ГА, активной мощности, величины открытия НА, угла разворота лопастей РК и напора.
В моменты времени tk измеряют текущие значения напора Н, угла установки лопастей (φ(tk), величины открытия НА a(tk), активной мощности Pa(tk) и частоты f(tk), которые передают в блоки 1 и 6. В блоке 6 уточняют значения параметров и переменных состояния ГА с помощью рекуррентного МНК (обучают модель ПЛТ). Полученные оценки параметров обученной модели ПЛТ передают в блок 1, где их используют в алгоритмах формирования требуемых значений a тр(tk) величины открытия НА и требуемых значений φтр(tk) угла разворота лопастей РК. Требуемые значения величины открытия НА a тр(tk) и угла разворота лопастей РК φтр(tk) в моменты времени tk формируют в блоке 1 по алгоритму адаптивного управления, который получают минимизацией функционала обобщенной работы

с помощью принципа максимума с учетом условий, заданных:
- уравнениями (3), (4), (5) модели ПЛТ;
- ограничениями на величины скоростей открытия НА и разворота лопастей РК:

заданными заводскими характеристиками для предотвращения гидравлических ударов;
- уравнением комбинаторной зависимости, которое определяет углы разворота лопастей, обеспечивающие максимальную мощность турбины:

где: Pтр(t) - требуемое значение активной мощности ГА; Mг(t) - крутящий момент, созданный турбиной на валу генератора:

а с - величина открытия НА при работе на синхронной частоте вращения ротора без нагрузки на генератор; σР и σf - пределы основных погрешностей измерения активной мощности и частоты; ψ(t) - скорость открытия НА.
Вычисленное значение a тр(tk) подают на вход регулятора 2 открытия НА и регулятора 8 разворота лопастей РК соответственно. Регулятор 2 вычисляет невязку между требуемым значением величины открытия НА a тр(tk) и измеренным значением a(tk); формирует управляющее воздействие (например, по алгоритму ПИ-регулирования) и передает его на вход сервомотора механизма открытия НА 3, который устанавливает новое значение величины открытия НА. Аналогично регулятор 8 вычисляет невязку между требуемым значением угла разворота лопастей РК φтр(tk) и измеренным значением φ(tk), формирует управляющее воздействие (например, по алгоритму ПИ-регулирования) и передает его на вход сервомотора механизма 7, который устанавливает новое значение угла разворота лопастей рабочего колеса.
Переменные a(tk) и φтр(tk), сформированные по алгоритму адаптивного управления, обращают в минимум ФОР (6) при ограничениях (3)÷(5), (7)÷(9). Но ФОР (6) образован суммой квадратов четырех слагаемых, поэтому алгоритм управления, обращающий в минимум этот функционал, обеспечивает в любом режиме работы гидроагрегата минимально возможные значения каждого слагаемого. Следовательно, заявленный способ во всех режимах работы обеспечивает минимальную среднеквадратическую погрешность управления активной мощностью (первое слагаемое), минимальную среднеквадратическую погрешность управления частотой (второе слагаемое), минимальную величину открытия НА (третье слагаемое) и минимальную скорость изменения величины открытия НА (четвертое слагаемое). А по условию максимума (8) угол разворота лопастей, найденный в результате решения уравнения (8), обеспечивает максимальную мощность ПЛТ. Максимальную мощность ПЛТ при минимальной величине открытия НА можно получить только при минимальных гидравлических потерях в турбине. Следовательно, заявленный способ уменьшает гидравлические потери и увеличивает к.п.д. турбины. Но гидравлические потери в ПЛТ минимальны лишь в режиме нормального выхода потока воды из РК. В этом режиме турбулентный поток воды, перемещаясь параллельно продольной оси турбины, скользит вдоль стенок отводящей трубы и поэтому создает минимальную вибрацию отводящей трубы и других деталей ГА. Следовательно, заявленный способ уменьшает вибрацию и динамические нагрузки на детали турбины и, поэтому, увеличивает надежность работы ГА.
Изобретение относится к способам управления активной мощностью и частотой гидроагрегата (ГА) ГЭС с поворотно-лопастной турбиной. Управляют активной мощностью и частотой изменением величины открытия направляющего аппарата (НА) и угла разворота лопастей рабочего колеса (РК) турбины за счет формирования и подачи управляющих воздействий на сервомоторы механизмов открытия НА и разворота лопастей РК. Управляющее воздействие на сервомотор открытия НА формируют с помощью алгоритма адаптивного управления, который получают минимизацией функционала обобщенной работы (ФОР) с учетом ограничений, заданных моделью ГА и заводскими характеристиками. ФОР составляют в виде интеграла суммы квадратов четырех нормированных слагаемых: отклонения активной мощности гидроагрегата от требуемой мощности, отклонения частоты генерируемого тока от требуемой частоты, величины открытия НА и скорости изменения величины открытия НА. В модель ГА включают основное энергетическое уравнение турбины и уравнение динамики ротора. Параметры модели уточняют рекуррентным методом наименьших квадратов. Управляющее воздействие на сервомотор разворота лопастей определяют из условий максимума активной мощности ГА при любых величинах открытия НА и действующем напоре, выполнение которых обеспечивают изменением угла разворота лопастей РК. Изобретение направлено на уменьшение среднеквадратических погрешностей управления активной мощностью и частотой, гидравлических потерь и вибрации, на увеличение к.п.д. турбины и надежности работы ГА. 1 ил.
Способ адаптивного управления активной мощностью и частотой гидроагрегата ГЭС с поворотно-лопастной турбиной, в котором управляют активной мощностью и частотой изменением величины открытия направляющего аппарата и угла установки лопастей рабочего колеса турбины за счет формирования и подачи управляющих воздействий на сервомоторы механизмов открытия направляющего аппарата и разворота лопастей рабочего колеса; управляющие воздействия на сервомоторы формируют по алгоритмам, которые составляют с применением модели гидроагрегата, содержащей комбинаторную зависимость и основное энергетическое уравнение гидроагрегата с поворотно-лопастной турбиной; переменные состояния и параметры модели уточняют рекуррентным методом наименьших квадратов в процессе управления; управляющее воздействие на сервомотор механизма открытия направляющего аппарата формируют с помощью рекуррентного алгоритма адаптивного управления, который получают минимизацией функционала обобщенной работы с учетом ограничений, заданных моделью гидроагрегата и заводскими характеристиками, отличающийся тем, что функционал обобщенной работы составляют в виде интеграла суммы квадратов четырех нормированных слагаемых: отклонения активной мощности гидроагрегата от требуемой мощности, отклонения частоты генерируемого тока от требуемой частоты, величины открытия направляющего аппарата и скорости изменения величины открытия направляющего аппарата; в математическую модель гидроагрегата включают уравнение динамики его ротора; комбинаторную зависимость определяют из условий достижения максимальных значений мощности турбины при любых величинах открытия направляющего аппарата и действующем напоре, которые обеспечивают изменением угла разворота лопастей рабочего колеса.
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ АКТИВНОЙ МОЩНОСТЬЮ ГИДРОАГРЕГАТА С ПОВОРОТНО-ЛОПАСТНОЙ ТУРБИНОЙ | 2009 |
|
RU2468246C2 |
| СПОСОБ АДАПТИВНОЙ КОРРЕКЦИИ КОМБИНАТОРНОЙ ЗАВИСИМОСТИ ПОВОРОТНО-ЛОПАСТНОЙ ГИДРОТУРБИНЫ | 2005 |
|
RU2302551C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АКТИВНОЙ МОЩНОСТЬЮ ГИДРОАГРЕГАТА С ПОВОРОТНО- ЛОПАСТНОЙ ТУРБИНОЙ | 1972 |
|
SU420801A1 |
| Автомат для печатания ярлыков | 1979 |
|
SU825344A1 |
| JP 5180141 A, 20.07.1993 | |||

