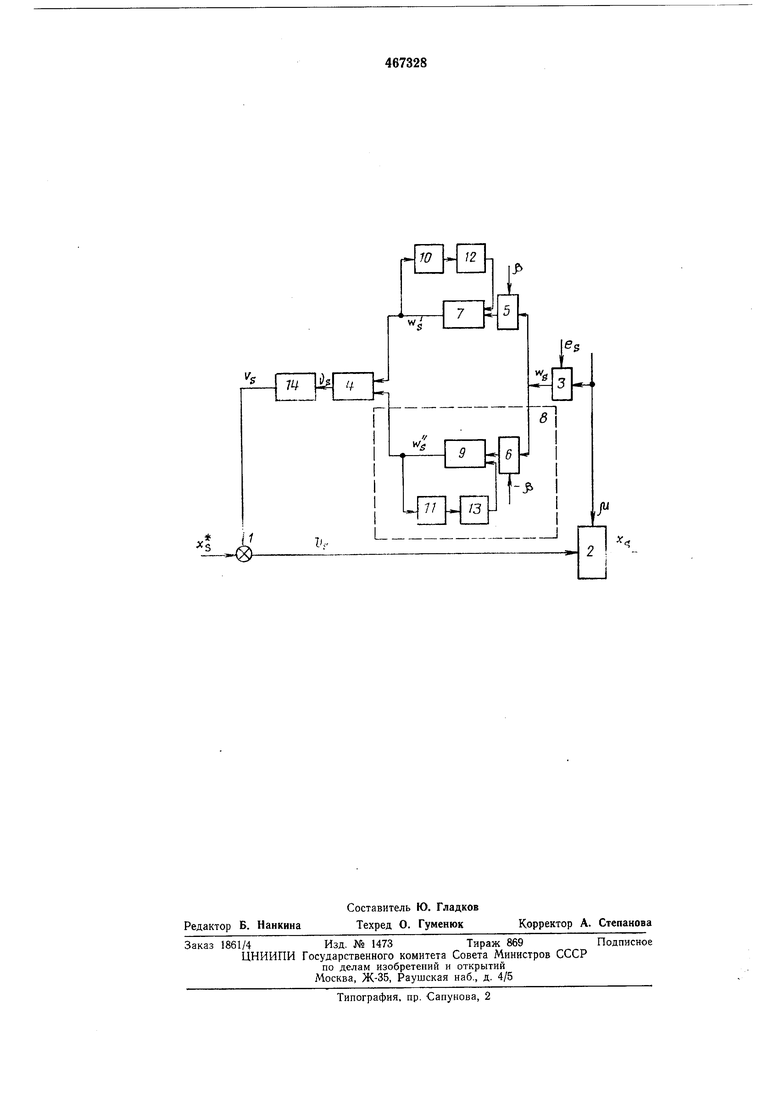
Система работает следующим образом. При воздействии на объект случайного возмущения р, на него подается компенсирующее управляющее воздействие Us, которое вырабатывается звеном 1 путем сравиения у« « задающего воздействия (индекс «s указывает на дискретный момент времени s). Возмущение ji измеряется яа фоне аддитивной помехи BS, равномерно распределенной на интервале (-р, р). На элементах 5 и 6 происходит ограничение величины . Элементы задержки 10 ii i 1 осуществляют задержку сигналов Ws и Ws соответственно. С выходов ячеек памяти 12, 13 снимаются сигналы Ws-i, Ws-i , где ws - mm 1 ш + fi, tWi + р,..., Ws-i + |, ws - max w, - fi, Wi - - p 1 Второй сумматор 4 осуществляет операцию суммирования V i: + ws. С выхода делительного устройства 14 снимается сигнал .. Алгоритм работы системы автоматического управления мож«о получить, если рассмотреть байесову задачу синтеза оптимального регулятора для безынерционного объекта при наличии случайных помех в тракте системы при независимом накоплении информации. Предположим, что случайная величина |д, распределена по закону Коши т:. а аддитивная помеха измерения воздействия ц имеет равномерное распределение на интервале (-, р), т. е. P(..) при ее(-, Р), РЗапищем выражение для условной плотности распределения вероятности при oleC-fi+b + v-y Р(Ш,/р): 2 0 при ш,е(-Р+1. +У-)Таким образом, для получения оценки возмущения ц на фоне помех е« в тракте системы, необходимо сформировать сигнал max {Wa - f, Wi-|:i,..., ) 2min {WQ + , Wi+ fWy i +f } где i-оценка .возмущения jj,. С каждым тактом s происходит все больщее накопление информации о действующем на объект возмущения ц на фоне аддитивной по.мехи этом |я.,, т. е. с каждым тактом s система точнее отрабатывает возмущение ц, и регулируемая величина Xs стремится к задающему воздействию . Предмет изобретения Система автоматического управления, содержащая последовательно соединенные делительное устройство, измеритель рассогласования, выход которого соединен со входом объекта, первый сумматор и последовательно соединенные первый элемент задержки и лервую ячейку памяти, отличающаяся тем, что, с целью увеличения помехозащищенности системы .и улучшения качества переходных процессов, система дополнительно содержит второй сумматор, второй элемент задержки, вторую ячейку памяти, последовательно соединенные звено ограничения верхнего предела и звено выделения минимума, последовательно соединенные звено ограничения нижнего предела и звено выделения максимума, выходы звеньев выделен:ия макси1Мума и минимума через .второй сумматор соединены с делительным устройством, выход звена выделения минимума соединен с входом первого элемента задержки, выход первой ячейки памяти соединен с одним из входов звена выделения минимума, выход звена выделения максимума через последовательно соединенные второй элемент задерЖ)Ки и вторую ячейку памяти соединен с одним из входов звена в.ыделения максимума, а входы звеньев ограничений верхнего и нижнего пределов соединены с выходом первого сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивное регулирующее устройство | 1985 |
|
SU1273878A1 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 1994 |
|
RU2107394C1 |
| Устройство для стабилизации объекта упругой конструкции | 1988 |
|
SU1532897A1 |
| Устройство для автоматического регулирования толщины полосы на прокатном стане | 1990 |
|
SU1729643A1 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2004 |
|
RU2288449C2 |
| Устройство для определения частотных характеристик динамических объектов | 1977 |
|
SU744474A1 |
| Устройство для регулирования величины рн в абсорбционной колонне с рециклом | 1976 |
|
SU582816A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАСКАДНЫМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 1991 |
|
RU2012032C1 |
| Адаптивная система управления | 1985 |
|
SU1361502A1 |
| Устройство для адаптивной обработки сигналов | 1981 |
|
SU1014127A1 |