Предлагаемый силовой следящий электропривод наведения механического объекта управления, .например зеркала радиотелескопа, относится к системам автоматического управления.
Пзвестен силовой следящий электропривод наведения механической системы, содержащий последовательно соединенные измерительный элемент, сумматор, промежуточный усилитель, усилитель мощности, исполнитель,ный двигатель, редуктор, опорно-поворотное устройство и объект управления, выход которого связан с из.мерительным элементом, к второму .выходу которого последовательно подсоединены корректирующий блок, усилитель с ограничением, регулятор тока и вспомогательный двигатель с редуктором.
Под опорно-поворотным устройством понимается механическая система, предназначенная для закрепления в пространстве объекта управления и передачи ему управляющего воздействия от редуктора. Редуктор и особенно опорно-поворотное устройство - это сложные динамические системы с инерционными массами и упруги.ми звеньями.
Известная система не обеспечивает возможности уменьщения ошибки при наличии широкополосного внешнего воздействия, спектр которого может охватывать езонансную частоту объекта управления.
Предлагаемый привод отличается тем, что он содержит пропорционально-интегральный блок, редуктор вспомогательного двигателя связан с объектом управления, а выход регулятора тока через пропорционально-интегральный блок соединен с входом сумматора.
Это позволяет повысить точность отработки управляющих и возмущающих воздействий.
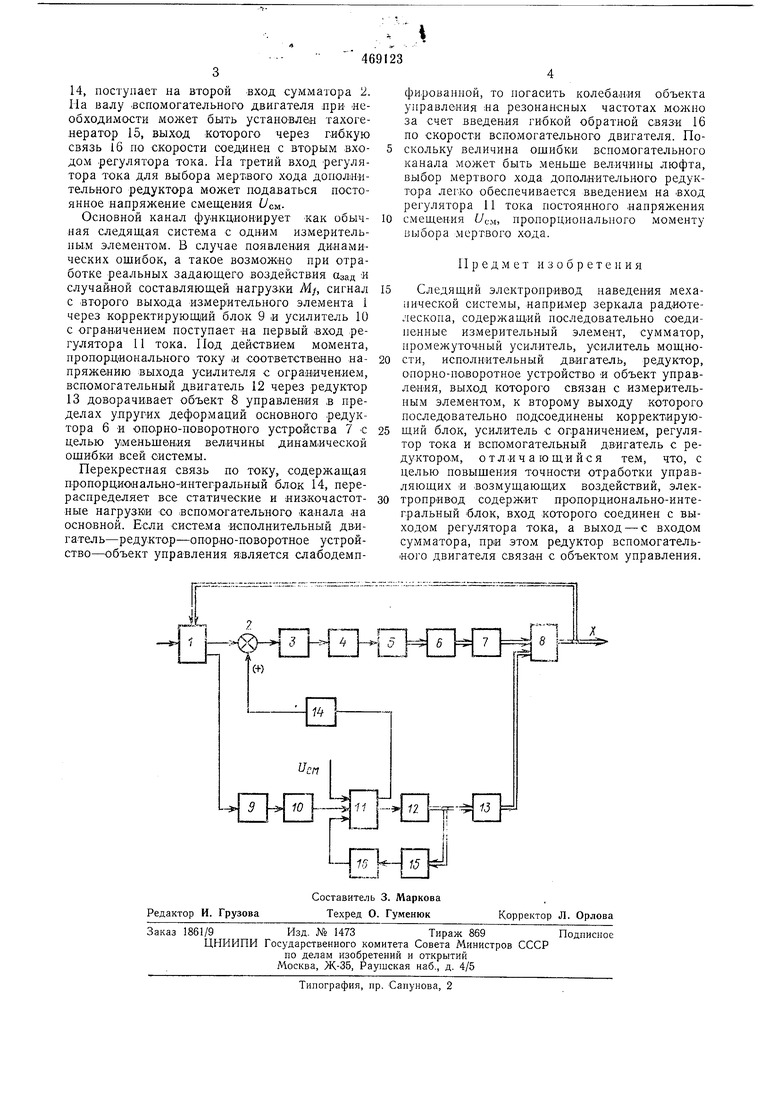
На чертеже приведена блок-схема электропривода.
Электропривод содержит измерительный элемент 1, который выделяет величину рассогласования между задающим воздействием Озад и выходной координатой следящего привода X. С первого выхода измерительного элемента сигнал через первый вход сумматора 2, промежуточный усилитель 3, усилитель 4 мощности подается на исполнительный двигатель 5. Последний через редуктор 6 и опорно-поворотное устройство 7 связан с объектом 8 управления мехаппческой системой. Второй выход измерительного элемента нодключен через корректирующий блок 9, усилитель 10 с ограничением и регулятор 11 тока к вспомогательному двигателю 12, активный момент с которого передается на второй вход (силовую шестерню) объекта управления через редуктор 13. Сигнал с второго выхода регулятора тока через перекрестную связь по току, содержащую пропорционально-интегральный блок
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод наведения механической системы | 1988 |
|
SU1562333A2 |
| Следящий электропривод наведенияМЕХАНичЕСКОй СиСТЕМы | 1979 |
|
SU809053A2 |
| Система автоматического сопровождения телескопа | 1989 |
|
SU1725181A1 |
| Следящая система | 1975 |
|
SU608118A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2015 |
|
RU2621716C2 |
