1
Изобретение относится к области автоматики и вычислительной техники, а именно, к устройствам, нреобразуюш,им цифровой код в угловое перемещение.
Известны преобразователи «код-гугол, содержащие генератор высокой частоты, выход которого соединен с клапаном, счетчики имнульсов, блок фазового сравнения частот, первый вход которого соединен с выходом одного счетчика, а выход через усилитель соединен со входом исполнительного двигателя. К недостаткам известных устройств относится относительно низкая точность преобразования кода в угол поворота вала исполнительного механизма, вызванная неточностью самих индукционных фазовращателей, а также необходимость фазирования генератора синусоидальных колебаний прямоугольными импульсами с выхода счетчика, также связанная с неизбежными погрещностями, что приводит к ошибке преобразования код - угол. Кроме того, известным преобразователям свойственны низкие динамические показатели преобразования, так как ввод нового кода может быть осуществлен лишь после предварительного запрета прохождения импульсов на, второй счетчик клапаном и сброса на нуль этого счетчика. В этом случае отработка кода преобразователем начинается не с момента введения кода, а спустя некоторый промежуток времени, когда первый счетчик по окончании цикла работы выходным импульсом вновь открывает клапан.
Целью изобретения является повышение точности работы преобразователя код - угол. Эта цель достигается введением в преобразователь сервопривода, блока изменения числа импульсов и дифференциального частотного датчика, выполненного в виде безобмоточного ротора, подвижного и неподвижного статоров с обмотками, причем выход генератора высокой частоты соединен со входом сервопривода, вал которого соединен с ротором дифференциального частотного датчика,
и через первый клапан выход генератора высокой частоты соединен со входом первого счетчика импульсов и с одним входом блока изменения числа импульсов, выход которого соединен со входом второго счетчика; выходная обмотка неподвижного статора дифференциального частотного датчика соединена с одним входом блока унравления клапанами, второй вход которого соединен с выходом первого счетчика импульсов, один выход блока управления клапанами соединен с первым клапаном, а второй выход - со вторым клапаном; выходная обмотка подвижного статора дифференциального частотного датчика через второй клапан соединена с другим входом блока фазового сравнения частот, а вал
подвижного статора соединен с валом двигателя.
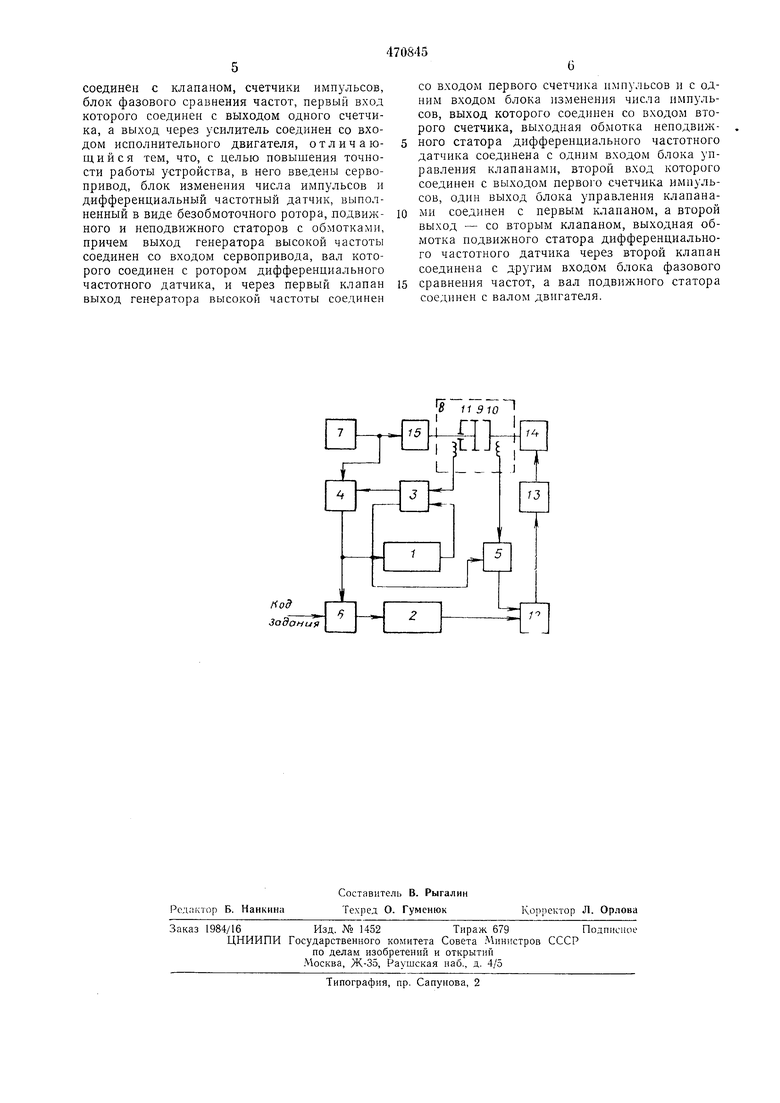
На чертеже приведена блок-схема преобразователя «код - угол.
Преобразователь содержит два счетчика импульсов 1 и 2 одинаковой емкости, блок 3 управления клапанами 4 и 5, блок 6 изменения числа импульсов, генератор 7 высокой частоты, дифференциальный частотный датчик 8, являющийся датчиком углового перемещения и включающий ротор 9, подвижный и неподвижный статоры 10 и 11 с обмотками соответственно, блок 12 фазового сравнения частот, соединенный через усилитель 13 с исполнительным двигателем 14, и сервопривод 15.
Блок 3 управления клапанами выполнен из последовательно соединенных устройства определения сближения импульсов на временной интервал Тс и логического устройства.
Блок 12 фазового сравнения частот выполнен из последовательно соединенных устройства определения сближения импульсов на временной интервал tc, аналогичного устройству блока 3, и многотактного логического устройства.
Преобразователь «код-угол работает следующим образом.
ЕСли в начальный момент сдвяг между зубцами подвижного и неподвижного статоров дифференциального частотного датчика 8 отсутствует, сигналы с выходов подвижного 10 и неподвижного 11 статоров датчика синфазны, и если клапаны 4 и 5 закрыты, то сигнал с выхода неподвижного статора И датчика 8 изменяет состояние блока 3 управления клапанами, который открывает клапаны 4 и 5, пропуская тем самым импульсы с генератора 7 высокой частоты на счетчик импульсов 1 и блок 6 изменения числа импульсов. С приходом на вход счетчика 1 количества импульсов, равного величине емкости этого счетчика, на выходе счетчика 1 появится импульс, который изменяет выходной сигнал блока управления клапанами 3.
Клапан 4 закрывается, прекращая тем самым прохождение импульсов с генератора 7 на вход счетчика 1 и блок 6 изменения числа импульсов. Открывается клапан 4 лищь с приходом на другой вход блока 3 управления клапанами сигнала с выхода неподвижного статора 11 датчика 8.
Таким образом, осуществляется синхронизация начала каждого цикла работы счетчика с моментом прихода импульсов с выхода неподвижного статора 11 датчика 8, необходимая для последующего фазового сравнения импульсов, поступающих с выхода счетчика 2, с сигналом с выхода подвижного статора 10 датчика 8.
Если заданный код равен нулю, то первоначальное состояние счетчика 2 таково, что импульсы с его выхода появляются с первым импульсом на его входе после открытия клалана 4. Поэтому в каждом цикле работы счетчиков, импульс с выхода счетчпка 2 будет синфазен в пределах зоны квантования с сигналом с неподвижного статора 11 датчика 8. А так как полагаем, что сдвиг между зубцами подвижного и неподвижного статоров датчика 8 отсутствует, то этот импульс со счетчика 2 будет синфазен и с сигналом с выхода подвижного статора 10 датчика 8. При этом выходной сигнал с блока 12 фазового сравнения частот равен нулю, очевидно, что такое положение управляемого органа соответствует нулевому входному коду.
В том случае, когда сдвиг между зубцами подвижного и неподвижного статоров датчика 8 не равен нулю при нулевом входном коде, на выходе блока 12 фазового сравнения частот появляется сигнал рассогласования, воздействующий через усилитель 13 на исполнительный двигатель 14. Двигатель 14, в свою
очередь, поворачивает подвижный статор 10 дат1;ика 8 до тех пор, пока фазовое рассогласование сравниваемых частот не будет равно нулю, то есть, пока не исчезнет сдвиг между зубцами подвижного и неподвижного статоров датчика 8.
При вводе в блок 6 некоторого кода в зависимости от величины и знака этого кода, блок 6 высекает или добавляет соответствующее число импульсов, сдвигая тем самым фазу импульса с выхода счетчика 2 по отнощению к фазе сигнала с выхода подвижного статора 10 датчика 8. При этом блок 12 так же, как и в предыдущем случае, выдает сигнал рассогласования. Производится отработка рассогласования, в результате чего статор 10 занимает новое угловое положение, соответствующее введенному коду.
Такое устройство сдвига фазы импульсов с выхода счетчика 2 позволяет непрерывно отслеживать код и нуждается в периодическом
сбросе счетчиков в исходное состояние, что
значительно повышает динамические качества
устройства.
Для вращения ротора 9 может быть использован синхронный двигатель или двигатель постоянного тока, управляемый астатическим дискретным регулятором скорости. Очевидно, что скорость вращения ротора 9 должна быть такой, чтобы частоты сигналов
с выходов статора датчика и счетчика 1 (или 2) были равны между собой. В данном устройстве это достигается тем, что сервопривод 15 синхронизируется частотой, которая поступает на счетчики 1 и 2. Однако вследствие
различных помех возможно в отдельные моменты изменение мгновенной скорости сервопривода. В предлагаемом устройстве исключение влияния неравномерности вращения на точность преобразования «код - угол обе
спечивается блоком 3 управления клапанами, соединенным с клапанами 4 и 5.
Предмет изобретения
Преобразователь «код - угол, содержащий генератор высокой частоты, выход которого
соединен с клапаном, счетчики импульсов, блок фазового сравнения частот, первый вход которого соединен с выходом одного счетчика, а выход через усилитель соединен со входом исполнительного двигателя, отличающийся тем, что, с целью повышения точности работы устройства, в него введены сервопривод, блок изменения числа импульсов и дифференциальный частотный датчик, выполненный в виде безобмоточного ротора, подвижного и неподвижного статоров с обмотками, причем выход генератора высокой частоты соединен со входом сервопривода, вал которого соединен с ротором дифференциального частотного датчика, и через первый клапан выход генератора высокой частоты соединен
со входом первого счетчика импульсов и с одним входом блока изменения числа импульсов, выход которого соединен со входом второго счетчика, выходная обмотка неподвижного статора дифференциального частотного датчика соединена с одним входом блока управления клапанами, второй вход которого соединен с выходом первого счетчика импульсов, один выход блока управления клапанами соединен с первым клапаном, а второй выход - со вторым клапаном, выходная обмотка подвижного статора дифференциального частотного датчика через второй клапан соединена с другим входом блока фазового
сравнения частот, а вал подвижного статора соединен с валом двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь код-угол | 1975 |
|
SU507928A1 |
| Дискретный электропривод | 1978 |
|
SU911456A1 |
| Двухканальная следящая система | 1975 |
|
SU570880A1 |
| Дискретный электропривод | 1977 |
|
SU809055A1 |
| Двухдвигательный электропривод с механическим дифференциалом | 1973 |
|
SU866678A1 |
| РАСТРОВЫЙ ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 2007 |
|
RU2334948C1 |
| Частотно-управляемый синхронный электропривод | 1983 |
|
SU1112521A1 |
| Стабилизированный параметрический электродвигатель | 1987 |
|
SU1555773A1 |
| СКВАЖИННЫЙ ВИБРАТОР С УПРАВЛЕНИЕМ ЧЕРЕЗ КАРОТАЖНЫЙ КАБЕЛЬ | 1996 |
|
RU2112253C1 |
| Двухдвигательный следящий электропривод | 1973 |
|
SU479085A1 |