1
Изобретение касается автоматики и вьк числительной техники, в частности устройств, преобразующих цифровой код в угловое перемещение.
Известны преобразователи код-угол,
содержащие датчик угла, ротор которого кинематически соединен с сервоприводом, а подвижный статор - с двигателем, блок изменения числа импульсов, соединенный с первым делителем частоты, непосредственно и через последовательно соединенные делитель частоты, блок фазового сравнения и усилитель -со входом двигателя.
В известных преобразователях изменение мгновенной скорости сервопривода при неизменном входном коде приводит к возникнсвению динамической ошибки.
Целью изобретения является повышение динамической точности преобразователя
код-угол при действии внешних возмущений
Это достигается введением управляемого генератора и дополнительного блока зового сравнения, первый вход которого соединен с неподвижным статором датчика угла, а второй - со входом второго делителя частоты, выход дополнительного блока фазового сравнения через управляемый генератор соединен со входом блока изменения числа импульсов и со вторым входом второго делителя частоты, подвижный статор соединен со входом блока фазового сравнения.
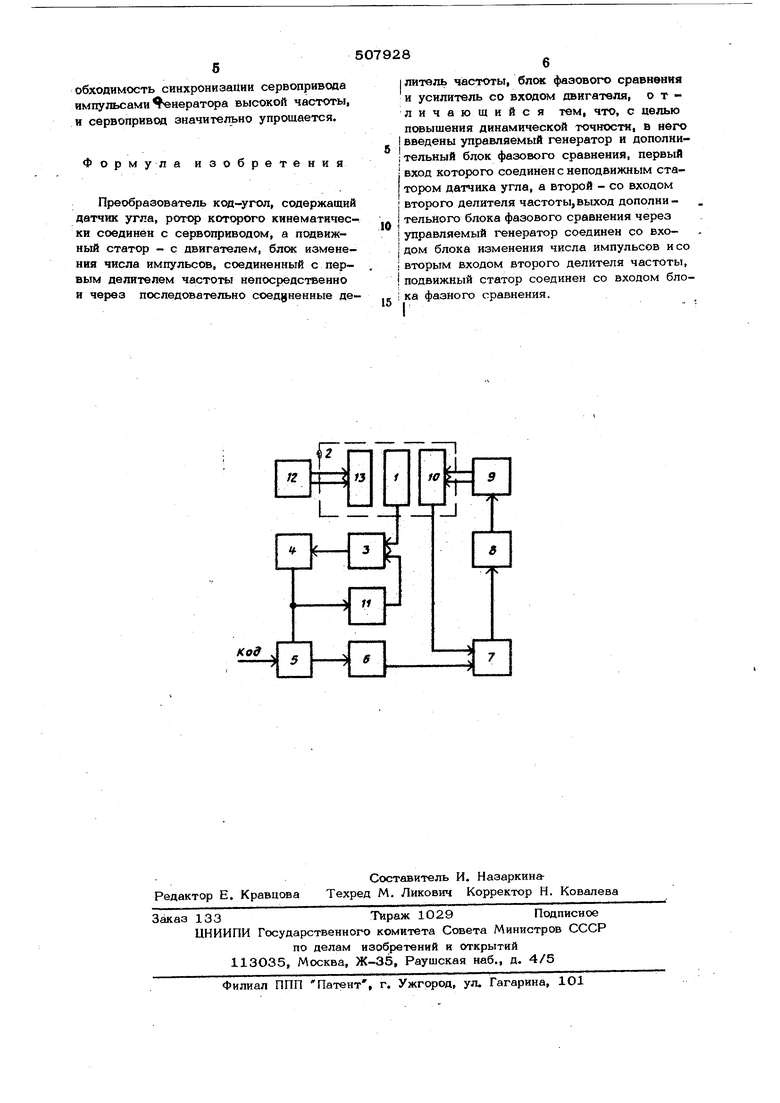
На чертеже приведена блок-схема предложенного преобразователя код-угол,
Он содержит последовательно соединенные неподвижный статор 1 датчика угла2,, дополнительный блок фазового сравнения 3 управляемый генератор 4, блок 5 navjeHeния числа импульсов, первый делитель 6 частоты, блок 7 фазового сравнения, усилитель 8 и двигатель 9, кинематически связанный с подвижным статором Ю датчика угла 2, а также делитель частоты 11 и сервопривод 12, кинематически связанный с ротором 13 датчика угла 2, Выход подвижного статора Ю датчика угла 2 со.единен со вторым входом блока фазового сравнения 7, выход управляемого генера-тора 4 через делитель частоты 11 связан со вторым входом дополнительного блока фазового сравнения 3. При вращении ротора 13 датчика угла 2 в обмотках подвижного 10 и неподвижного 1 статс ов датчика 2 возникает э.д.с., ча - -АJf Р стота которой; Зэ.Э.с. Т1г- где Шр - скорость вращения ротора 13 датчика 2; t - число импульсов, выдаваемых датчиком угла 2 за один оборот ротора 13 Импульсы этой частоты с выхода неподвижного 1 статора датчика 2 поступают на первц вход блока 3, на второй вхо которого подаются с выхода делителя ча|стоты 11 импульсы с частотой fj , Поскольку делитель частоты 11 подключен к выходууправляемого генератора 4, частота f буавт fц IT где j - частота импульсов управляемого генератора 4; п - коэффициент деления делителя ча стоты 11.о в блоке, фазового сравнения 3 происхо дит сравнение по фазе импульсов f и i и в зависимости от величины и знака фазового рассогласования производится упра ление частотой генератора 4 в сторону уменьшения фазового рассогласования этих импульсов. Следовательно, в установившем ся режиме fi f, и соответственно Таким образом, блоки 3, 4 и 11 служат для умножения частоты с выхода неподвижного 1 статора датчика угла 2 на число п , выбираемое в зависимости от величины углового перемещения d подвижного 1О статора датчика 2, соответствующего младшей единице входного кода преобразователя П - Такой умножитель частоты, имеющий астатизм по частоте, имеет некоторый статиз по фазе, ухудшающий статическую точность преобразования код-угол. Однако величина этого статизма зависит от коэффициента усиления блока 3. Поэтому заданная статическая точность преобразования, которая должна быть меньше ообеспечивается выбором необходимого коэффициента усиления блока фазового сравнения 3. Импульсы с выхода управляемого гене ратора частоты 4 с частотой fi, проходят через блок изменения числа импульсов 5 и поступают на вход делителя частоты 6, Коэффициент деления целителя частоты 6 выбирают равным коэ Фнциенту деления делителя 11, поэтому частота на выходе делителя 6 будет .Если в начальный момент пространственный сдвиг между зубцами подвижного 1О и неподвижного 1 статоров датчика угла 2 отсутствует, импульсы с вых№ статоров синфазны, и если к тому же заданный код равен О, импульс частотой fjjj с выхода подвижного 1О статора датчика угла 2 будет синфазен в пределах зоны статизма умножителя с выходным импульсом делителя частоты 6. При этом выходной сигнал с блока 7 сравнения по фазе частот и fg будет равен нулю. Очевидно, что такое пространстЕЮНное положение подвижного статора 10 датчика Угла 2 соответствует нулевому входному коду. В том случае, когда сдвиг между зубцами подвижного 10 и неподвижного 1 статорсш датчика угла 2 не равен нулю при нулевом входном коде, на выходе блока сравнения 7 появляется сигнал рассогласования, воздействующий через усилитель 8 на двигатель 9. Двигатель 9 поворачивает подвижный статор 1О датчика угла 2 до тех пор, пока фазовое рассогласование сравниваемых частот не будет равно нулю, то есть пока не исчезнет сдвиг между зубцами подвижного 10 и неподвижного 1 статоров датчика угла 2. При вводе в блок 5 изменения числа импульсов некоторого кода, в зависимости от величины и знака этого кода, блок 5 будет высекать или добавлять соответствующее число импульсов, сдвигая тем самым фазу импульсов с выхода делителя 6по отношению к фазе импульсов с вы- хода подвижного статора 10 датчика угла 2. При этом блок фазового сравнения 7также, как и в предыдущем случае, выдает сигнал рассогласования. Производится отработка рассогласования, в результате чего подвижный статор 1О занимает новое угловое положение, соответствующее введеному коду. При изменении мгновенной скорости ротора 13 датчика угла 2 частоты на выходе подвижного 10 и неподвижного 1 статоров датчика также из- г . I меняются и имеют вид l Jio° ZIT Однако, вместе с частотой f и f пропорционально изменяются частоты f fjl и fe О есть на входе устройства сравнения 7 частоты f и f останутся равными. Таким образом, изменение частоты вращения ротора 13 датчика угла 2 не приводит к появлению фазового рассогласования импульсов на входе блока сравнения 7 и следовательно не влияет на угловое положение подвижного Ю статора датчика угла 2. В результате отпадает необходимость синхронизации сервопривода импупьсами feHepaTOpa высокой частоты, и сервопривод значите/пзно упрощается.
Форм у л а изобретения
Преобразователь код-угол, содержащий датчик угла, ротор которого кинематически соединен с сервоприводом, а подвижный статор - с двигателем, блок, изменения числа импульсов, соединенный с первым делителем частоты непосредственно и через последовательно соединенные деIлитель частоты, блок фазового сравнения и усилитель со входом двигателя, отличающийся тем, что, с целью П1жышения динамической точности, в него I введены управляемый генератор и дополниI тельный блок фазового сравнения, первый I вход которого соединен с неподвижным статором датчика угла, а второй - со входом { второго делителя частоты,выход дополни тельного блока фазового сравнения через i управляемый генератор соединен со входом блока изменения числа импульсов и со I вторым входом второго делителя частоты, подвижный статор соединен со входом блока фазного сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь код-угол | 1974 |
|
SU470845A1 |
| Двухканальная следящая система | 1975 |
|
SU570880A1 |
| Дискретный электропривод | 1977 |
|
SU809055A1 |
| Двухдвигательный электропривод с механическим дифференциалом | 1973 |
|
SU866678A1 |
| Дискретный электропривод | 1978 |
|
SU911456A1 |
| Двухдвигательный следящий электропривод | 1973 |
|
SU479085A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для управления шаговым двигателем | 1975 |
|
SU699646A2 |
| Электропривод | 1985 |
|
SU1275726A1 |
| Преобразователь перемещения в код | 1980 |
|
SU888162A1 |
