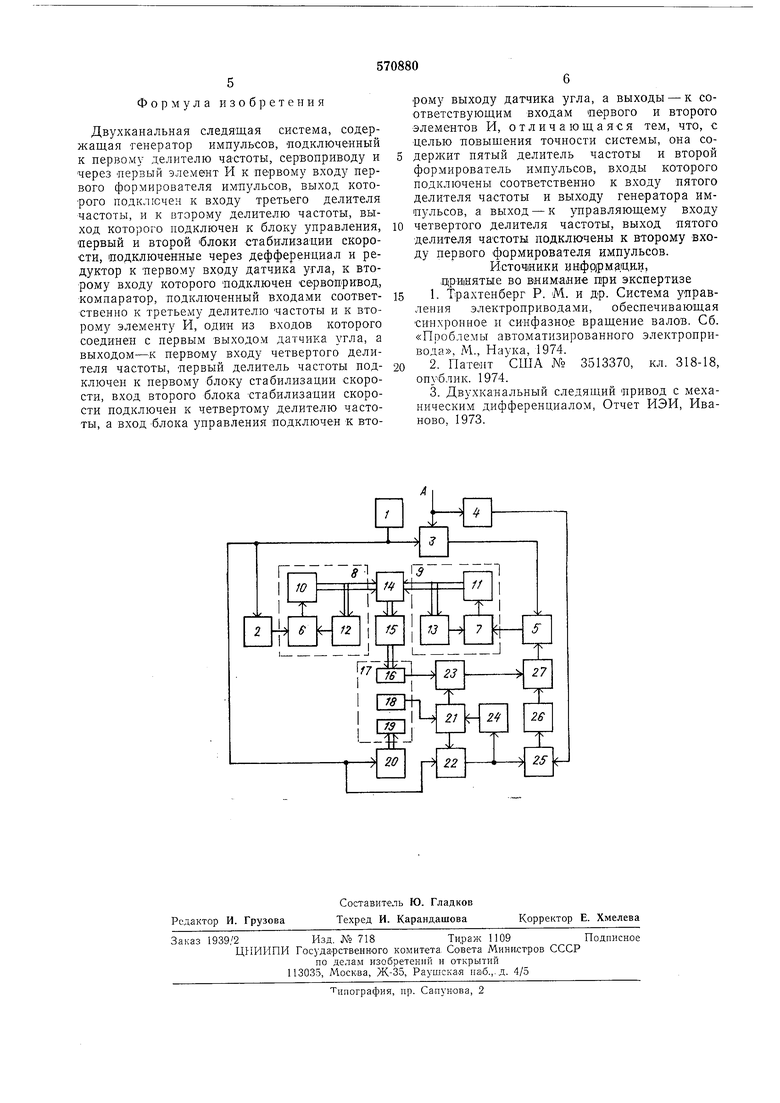
(54) ДВУХКАНАЛЬНАЯ СЛЕДЯЩАЯ СИСТЕМА --5701188 3 6 и 7 первого 8 и второго 9 блоков стабилизации скорости. Каждый из блоков 8, 9 содержит регуляторы 6, 7, выходами связанные с входами двитателей 10, 11, выходы которых соединены с5 входами частотных датчиков 12, 13 и соответствующими входами механического дифференциала 14. Выходы датчиков 12, 13 соединены с вторыми входами регуляторов 6, 7, выход дифференциала 14 через редуктор 15 - с по-Ю движным статором 16 датчика 17 угла, имеющего также подвижный статор 18 и ротор 19. Ротор 19 связан с выходом сервопривода 20, вход которого соединен с выходом генератора 1, выход статора 18 - с одним из входов15 блока 21 управления, два выхода которого соединены с входами элементов И 22 и 23. Выход генератора 1 соединен также с вторым входом элемента И 22, выход которого через второй делитель 24 частоты подключен к вто-20 рому входу блока 21. Выход элемента И 22 также соединен с одним из -входов первого формирователя 25 импульсов, дрзтой вход которого связан с выходом делителя 4, а выход через третий делитель 26 частоты подключен25 к одному из входов компаратора 27. Выход статора 16 соединен с другим входом элемента И 23, выход которого связан с вторым входом компаратора 27, выходом подключенного к второму входу делителя 5.30 Работает двухканальная система следующим образом. В исходном состоянии опорная частота генератора 1 через делитель 2 подается в блок 8 и через формирователь 3 и делитель 5 в35 блок 9. Каждый из блоков 8, 9 обеспечивает регулирование скорости в функции фазового рассбгласования частот задающей и с частотных датчиков 12, 13. Точность регулирования скорости каждого канала определяется не-40 стабильностью частоты генератора 1. Коэффициенты деления делителей 2, 5 в исходном состоянии одинаковы, а поэтому частоты на входах блоков 8, 9 равны, двигатели 10, 11 врашаются с одинаковыми по величине, но45 противоноложными по знаку скоростями. Выходная скорость системы равна нулю. При необходимости поворота выходной оси системы на заданный угол с заданной скоростью в формирователь 3 вводят задающий50 код, допустим унитарный, когда информация об угле задается числом импульсов я, а информация о скорости - частотой этих импульсов fif. Ввод в формирователь 3 кода приводит, в зависимости от знака, к добавлению55 или высеканию определенного числа импульсов в Последовательности импульсов с выхода генератора 1 и, следовательно, к сдвигу по фазе (времени) на величину Тс //i импульсов на выходе делителя 5. Это вызывает по-60 ворот выходного вала двигателя 11 на угол q,,+ , а выходного вала редуктора 15 - ZiKb г J г 1 „„ тг T,,.,TT.Tft .rf, на угол . где Кв - исходный коэф0 . 4 фициепт деления делителя 5; 2 - число зубцов датчика 13; i - передаточное число редуктора 15. Замыкание всей системы по углу осуществляется фазовым сравнением импульсов со статора 16 датчика 17, поступающих через элемент И на вход компаратора 27, и импульсов с делителя 26, фаза которых зависит от величины и знака кода, приведешюго к выходному валу редуктора 15 делением частоты импульсов кода a коэффициент деления Ki делителя 4. Для согласования шагов (ступеней), задаваемых на выходном валу высеканием (добавлением) одного импульса на входе делителя 26, и ступеней, нолучаюндихся в результате высекания (добавления) импульсов на входе делителя 5, коэффициент деления К4 делителя 4 должен выбираться равным коэффициенту редукции механической нередачи кинематических звеньев 14, 15, т. е. . Импульсы с выхода делителя 4 частоты поступают в формирователь 25, который по величине и знаку кода высекает или добавляет соответствующее число импульсов на входе делителя 26, сдвигая тем самым фазу импульсов на входе делителя 26, сдвигая тем самым фазу импульсов ф2б с выхода делителя 26 по отношению к фазе импульсов со статора 18 датчика 17. Если угол поворота выходного вала не соответствует заданному, то компаратор 27 выявляет фазовое рассогласование и так управляет делителем 5, чтобы свести рассогласование к нулю. Ввиду того, что частота приведенного кода в 2i раз ниже частоты задающего кода, то во время ввода кода относительно плавному изменеиию фазы импульсов со статора 16 дачика 17 соответствует ступенчатое изменение фазы импульсов на выходе делителя 26, что, казалось бы, должно привести к отра ботке системой фазового рассогласования этих импульсов. Но этого в предлагаемой системе нет, так как зона нечувствительности компаратора 27 выбирается равной или больщей стунени изменения фазы импульсов ср2б. При одинаковой, в среднем, скорости изменения фаз имнульсов ф2з, ф2б фазовое рассогласоъание между ними находится в пределах зоны нечувствительности компаратора 27. Введение заданного кода непосредственно в высокоскоростной канал системы приводит к повышению в 2t раз равномерности вращения выходного вала, так как один щаг поворота выходного вала системы, задаваемый высеканием (добавлением) одного импульса на входе делителя 26, отрабатывается системой в 2i шага, полченных в результате высекания (добавления) 2J импульсов на входе делителя 5 с частотой, больщей в 21 раза, Это означает, что минимальная скорость системь по сравнению с прототипом уменьщается в 2t раза, быстродействие системы при отработке малых рассогласований увеличивает . , .
Формула изобретения
Двухканальная следящая система, содержащая генератор импульсов, подключенный к первому делителю частоты, сервоприводу и через первый элемент И к первому входу первого формирователя импульсов, выход которого подключен к входу третьего делителя частоты, и к второму делителю частоты, выход которого подключен к блоку управления, Первый и второй блоки стабилизации скорости, подключенные через дефференциал и редуктор к первому входу датчика угла, к второму входу которого подключен сервопрквод, компаратор, подключенный входами соответственно к третьему делителю частоты и к второму элементу И, один из входов которого соединен с первым выходом датчика угла, а выходом-к первому входу четвертого делителя частоты, первый делитель частоты подключен к первому блоку стабилизации скорости, вход второго блока стабилизации скорости подключен к четвертому делителю частоты, а вход блока управления подключен к второму выходу датчика угла, а выходы - к соответствующим входам первого и второто элементов И, отличающаяся тем, что, с целью повышения точности системы, она содержит пятый делитель частоты и второй формирователь импульсов, входы которого подключены соответственно к входу пятого делителя частоты и выходу генератора импульсов, а выход - к управляющему входу
четвертого делителя частоты, выход пятого делителя частоты подключены к второму входу первого формирователя импульсов.
Источиики инфйрма1ци.и, .црийятые во внимание три экспертизе
1. Трахтенберг Р. М. и др. Система управления электроприводами, обеспечивающая синхронное и синфазно.е вращение валов. Сб. «Проблемы автоматизированного электропривода, М., Наука, 1974.
2. Патент США № 3513370, кл. 318-18, опублик. 1974.
3. Двухканальный следящий Привод с механическим дифференциалом. Отчет ИЭИ, Иваново, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухдвигательный электропривод с механическим дифференциалом | 1973 |
|
SU866678A1 |
| Дискретный электропривод | 1977 |
|
SU809055A1 |
| Дискретный электропривод | 1978 |
|
SU911456A1 |
| Преобразователь код-угол | 1975 |
|
SU507928A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Преобразователь код-угол | 1974 |
|
SU470845A1 |
| Управляемый электропривод | 1983 |
|
SU1144201A1 |
| Двухдвигательный следящий электропривод | 1973 |
|
SU479085A1 |
| Преобразователь угла поворота вала в код | 1976 |
|
SU661589A1 |
