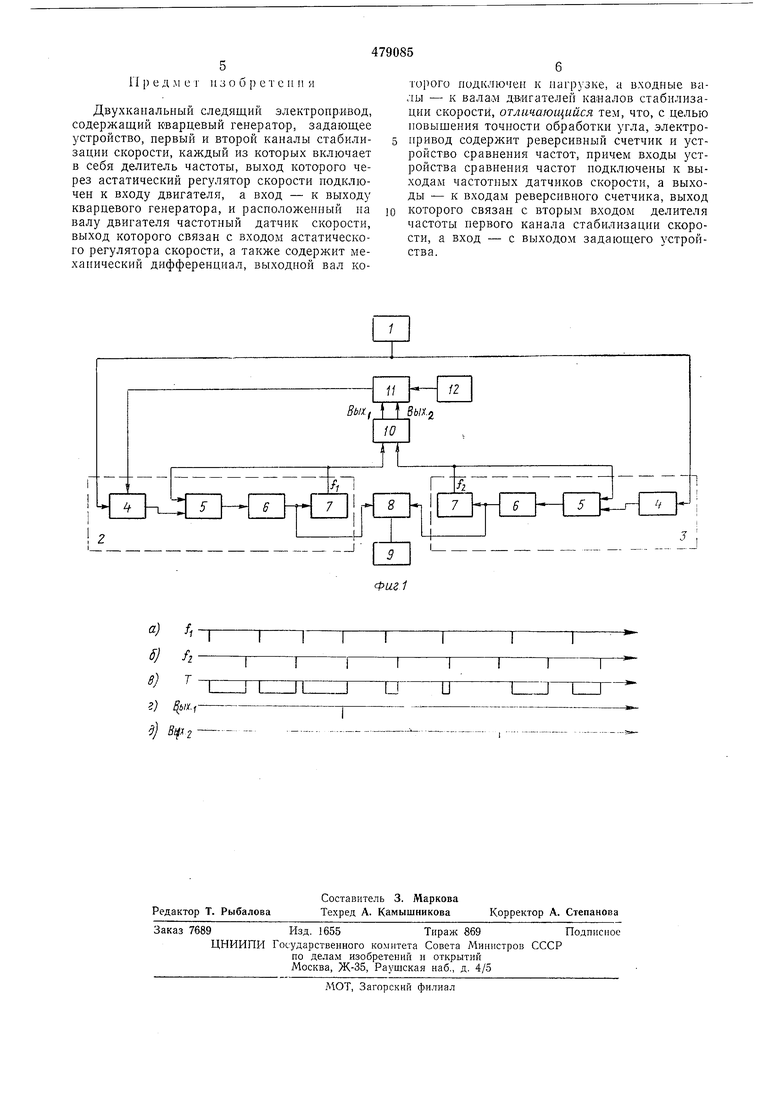
равляющнн сигнал, а ошибки угла поворота, вызванные изменением момента нагрузочного механизма, не отрабатываются электроприводом. Замыкание электропривода по выходному валу не всегда оправдано, так как это приводит к значительному усложнению системы регулирования и требует дополнительного датчика угла поворота. Цель изобретения - повышение точности привода. Это достигается тем, что в предлагаемый привод введены устройство сравнения частот и реверсивный счетчик, причем входы устройства сравнения частот подключены к выходам частотных датчиков скорости, а выходы - к входам реверсивного счетчика, выход которого связан с вторым входом делителя частоты первого канала стабилизации скорости, а вход - с выходом задаюш,его устройства. На фиг. 1 показана блок-схема следящего электропривода; нафиг. 2 приведены временные диаграммы его работы. Электропривод содержит кварцевый генератор 1, первый и второй каналы 2 и 3 стабилизации скорости, состоящие из делителей 4 частоты, астатических регуляторов 5 скорости, двигатель 6 частотного датчика 7 скорости. Кроме того, электропривод содержит механический дифференциал 8, нагрузку 9, устройство 10 сравнения частот, реверсивный счетчик И и задающее устройство 12. Электропривод работает следующим образом. Опорная скорость задается на оба идентичных канала стабилизации скорости кварцевым генератором. Скорость каждого канала пропорциональна частоте на выходе делителя частоты. Валы двигателей вращаются встречно; скорость вала нагрузки определяется выражением (I), а угол поворота определяется выражением (2). Частота на выходе датчиков скорости каналов пропорциональна скорости со вращения двигателей и числу Z меток на статоре и роторе датчиков и определяется выражениями в устройстве сравнения частот происходит определение разности частот, поступающих с датчиков 7, которая пропорциональна углу поворота выходного вала привода. Это следует из выражений (2) и (3). Подставляя выражение (3) в выражение (2) и заменяя интеграл на сумму, получаем л г п « - я « ос в«х - Ef,-S/2 -7- S (/1-/2) . (4) L оо о При чередовании импульсов частот /i и /г на выходе устройства сравнения частот импульсы отсутствуют. С приходом подряд двух импульсов частоты /i на первом выходе появляется импульс, что свидетельствует о том. 410 вал iiepi5oro двпгагелм повернулся па угол больший, чем вал второго двигателя. Соответственно выходной вал поворачивается в этом случае на Приход подряд имиульсОВ частоты /2 свидетельствует о большем повороте вала второго двигателя на ту же величину, и соответственно повороте выходного вала на угол, определяемый выражепием (6), в противоположную сторону. Точность определения угла поворота зависит от числа импульсов, выдаваемых частотпыми датчиками за один оборот. (Например, при .60 21600 точность из1мерения составляет угл. мин). В реверсивном счетчике 11 осуществляется сравиение заданного значения угла поворота с углом поворота выходного вала. Требуемый угол поворота нагрузки 9 формируется в задающем устройстве 12 в виде параллельного кода и вводится в реверсивный счетчик 11. Задающее устройство может управляться вручную автоматически. В частности, в качестве задающего устройства может использоваться ЦВМ. В зависимости от того, по первому или второму выходу устройства сравнения частот 10 на входы реверсивного счетчика И поступают импульсы, производится вычитание или сложение параллельного кода задания и последовательного кода с устройства сравнения частот и таким образом определяется рассогласование между заданным и истинным углами поворота выходного вала. Цифровым сигналом рассогласования с реверсивного счетчика управляется скорость двигателя канала 2 путем изменения коэффициента делителя 4 канала его стабилизации таким образом, чтобы ликвидировать угловое рассогласование. Следовательно, осуществляется отрицательная обратная связь по углу. При отработке больщих угловых рассогласований двигатели могут вращаться в одну сторону. В этом случае в устройстве 10 частоты с датчиков должны складываться, что технически осуществляется также просто. Таким образом, предлагаемый двухканальный электропривод обеспечивает работу в режиме слежения с высокой точностью, может работать как в режиме позиционирования, так и в синхронно-следящем режиме, т. е. создает синхронное и синфазное вращение выодного вала, имеет относительно простую конструкцию из-за отсутствия датчика на выходном валу, характеризуется отсутствием режимов пуска и останова двигателей.
ri p e Д M e т ii з о б p e т e и ti я
Двухканальыый следящий электропривод, содержащий кварцевый генератор, задающее устройство, первый и второй каналы стабилизации скорости, каждый из которых включает в себя делитель частоты, выход которого через астатический регулятор скорости подключен к входу двигателя, а вход - к выходу кварцевого генератора, и расположенный на валу двигателя частотный датчик скорости, выход которого связан с входом астатического регулятора скорости, а также содержит механический дифференциал, выходной вал которого подключен к нагрузке, а входные валы - к вала.м дв/игателей каналов стабилизации скорости, отличающийся тем, что, с целью новышения точности обработки угла, электропривод содержит реверсивный счетчик и устройство сравнения частот, причем входы устройства сравнения частот подключены к выходам частотных датчиков скорости, а выходы - к входам реверсивного счетчика, выход которого связан с вторым входом делителя частоты первого канала стабилизации скорости, а вход - с выходом задающего устройства.

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухдвигательный электропривод с механическим дифференциалом | 1973 |
|
SU866678A1 |
| Дискретный электропривод | 1977 |
|
SU809055A1 |
| Двухканальная следящая система | 1975 |
|
SU570880A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| Дискретный электропривод | 1978 |
|
SU911456A1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2161365C1 |
| Дискретный электропривод | 1976 |
|
SU744440A1 |
| Устройство для регулирования скорости электропривода | 1986 |
|
SU1322229A1 |
| Электропривод | 1985 |
|
SU1275726A1 |
| Преобразователь код-угол | 1974 |
|
SU470845A1 |