(S) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения транспортного средства | 1986 |
|
SU1401327A1 |
| Устройство автоматического управления движением транспортного средства | 1973 |
|
SU471872A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |
| Устройство автоматического управ-лЕНия дВижЕНиЕМ ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU847950A2 |
| РАСПРЕДЕЛИТЕЛЬНЫЙ ДВУЗНАЧНЫЙ ТАНДЕМ ЗОЛОТНИКОВ С ЛОГИЧЕСКОЙ ФУНКЦИЕЙ "ТО..., ТО" | 2002 |
|
RU2251029C2 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ АДАПТИВНЫМ ПНЕВМОГИДРАВЛИЧЕСКИМ РОБОТОМ | 2008 |
|
RU2463156C9 |
| Робототехнический комплекс | 1990 |
|
SU1726235A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛИННОБАЗНОГО АВТОПОЕЗДА | 2015 |
|
RU2604376C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ВСПОМОГАТЕЛЬНЫХ СИГНАЛОВ НА НАЗЕМНОМ УЧАСТКЕ ДВИЖЕНИЯ САМОЛЕТА | 2019 |
|
RU2733666C1 |
1
Изобретение относится к испытательной технике.
Известно устройство для автоматическо О вождения трактора при испытаниях на треке, содержащее опорную траекторию и систему изменения направления движения трактора, состоящую из троса, одним концом прикрепленного к установленному в центре круга якорю, а другим через упругий элемент к трактору. Кроме того, в этом устройстве трос охватывает установленнмй на рулевом . валу барабан l,
Известно также устройство для автоматического вождения трактора при испытаниях на треке, содержащее направляющую, выполненную в виде рель сового пути с тележкой, соединенной шарнирно тягой с кронштейном, установленным в передней части трактора, и систему изменения направления движения трактора t2.
Известно также устройство для автоматического вождения транспортного средства при испытаниях на треке, содержащее направляющие с тележками, шарнирно соединенные тягой с транспортным средством, и систему изменения направления движения, кинематически связанную с органами управления транспортного средства ЦЗ.
Недостатком известных устройств
10 является невозможность испытаний машины при движении ее в обратную сторону, так как в этом случае необходимо при отклонении машины по JJ курсовому углу поворачивать рулевой вал в противоположном направлении, при тех же условиях, но при движении вперед.
Кроме того, известные устройства
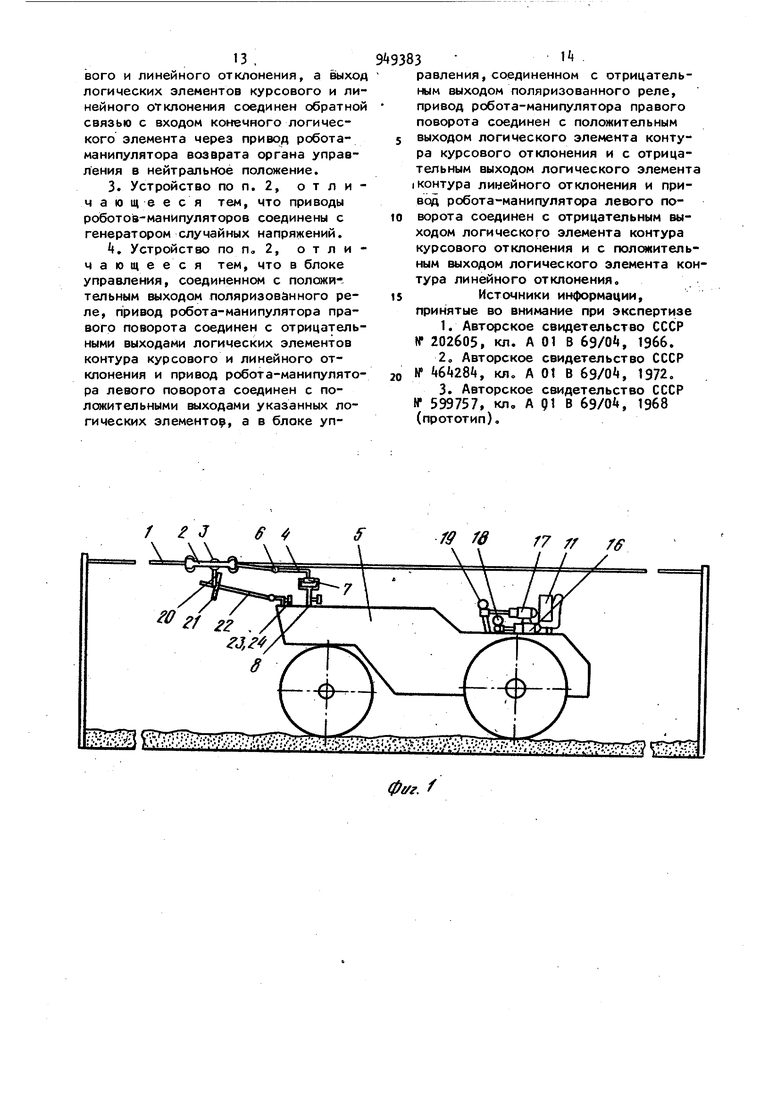
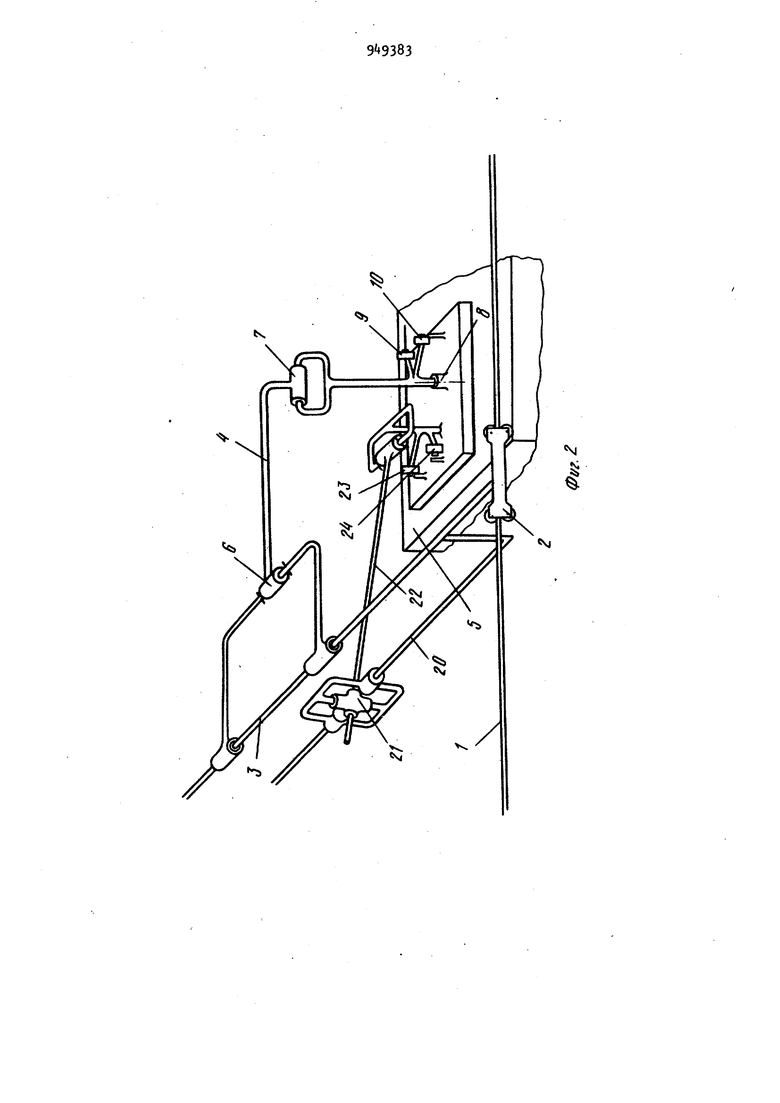
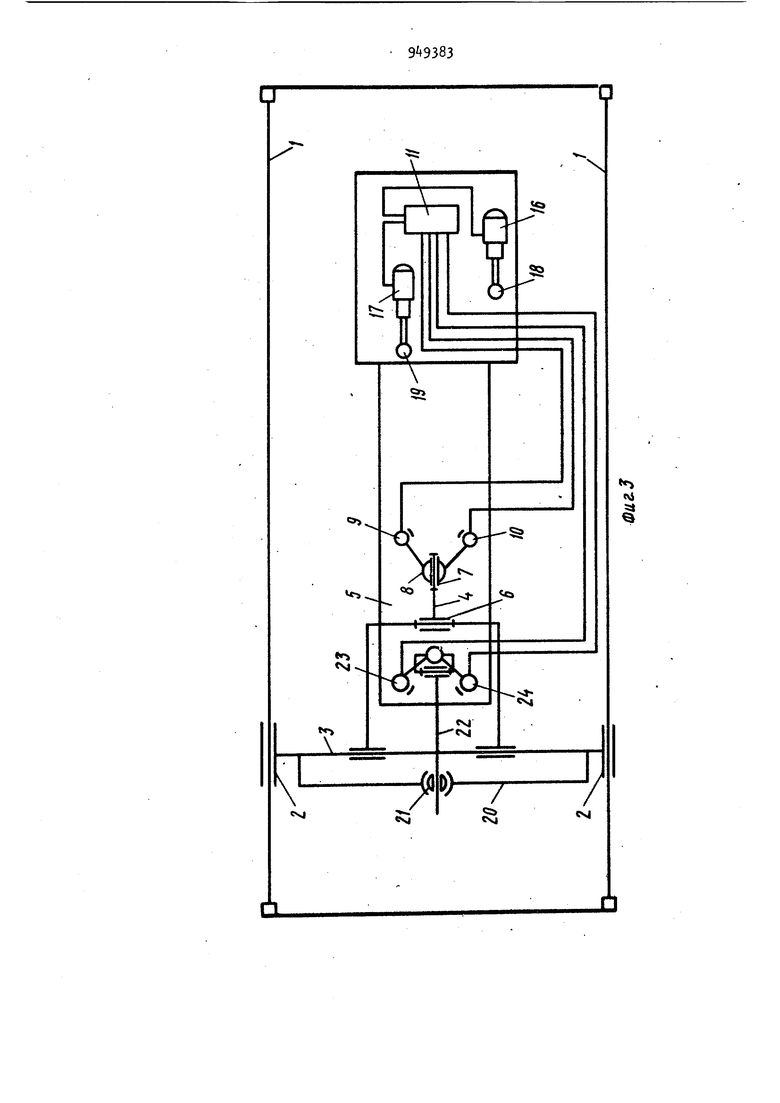
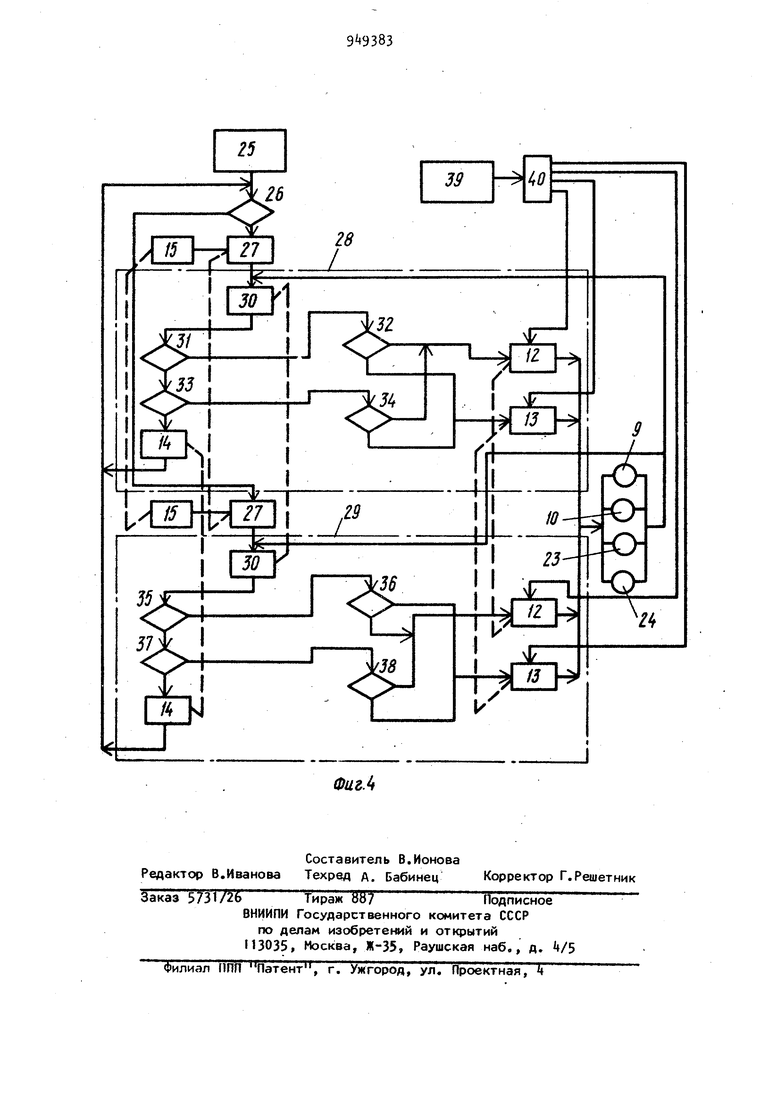
20 не различают прямого и обратного движения машины и не обеспечивают изменения управляющих воздействий при изменении условий движения. Это обуславливает невозможность имитации работы машин, типичными условиями работы которых является частое изменение направления движения на противоположное - реверсирование, как например для дорожных самоходных катков Известные устройства не обеспечивают возможности воспроизведения управляющих воздействий подобных управляющим воздействиям водителяоператора с учетом их вероятностного характера, как по частоте, так и по продолжительности их выполнения Невозможна имитация ошибок при управлении машиной. Цель изобретения - повышение точности имитации факторов, воздействующих на транспортное, средство в условиях эксплуатации Указанная цель достигается тем, что система изменения направления движения выполнена в виде рычага, за крепленного с возможностью продольно го перемещения на тяге, соединенного с передней частью транспортного средства посредством цилиндрических шарниров и Установленного с возможностью поворота в трех взаимно перпендикулярных плоскостях, и датчиков курсового отклонения транспортного средства, соединенных через блок фор мирования логико-Вероятностных сигналов с приводами роботов-манипуляторов, смонтированных на органах управления транспортного средства. Устройство снабжено траверсой, закрепленной параллельно тяге гироскопическим шарниром, установленным на траверсе, дополнительным рычагом, закрепленным на транспортном средств с возможностью поворота в горизонтал ной плоскости и соединенным с упомянутым гироскопическим, шарниром с воз можностью продольного перемещения последнего, двумя датчиками линейного отклонения транспортного оредства и блоком формирования логико-веро ятностных сигналов, кинематически свя занными между собой, причем последний выполнен в виде блока-задатчика часто ты реверсирования, соединенного чере конечный логический элемент типа ИЛИ и поляризованное реле реверса с двумя блоками управления, каждый из которых соединен с выходом поляризованного ре ле через блок-задатчик частоты поворо-55 тов и состоит из двух последовательно соединенных контуров, первый из скоторых содержит логический элемент курсоЭЗ4 вого отклонения транспортного средства, соединенный с входом логического элемента направления поворота, на выходе которого включены приводы робота-манипулятора правого и левого поворота, а второй - логический элемент линейного отклонения транспортного средства, соединенный с входом другого логического элемента направления поворота, также соединенного с приводами робота-манипулятора правого и левого поворотов, при этом приводы роботов-манипуляторов соединены обратной связью через датчики курсового и линейного отклонения с входом логического элемента контура курсового отклонения а выход логических элементов курсового и линейного отклонения соединен обратной связью с входом конечного логического элемента через привод робвта-мэнипулятора возврата органа управления в нейтральное положение. При этом приводы робота-манипулятора соединены с генератором случайных напряжений. Кроме того, в блоке управления, соединенным с положительным выходом поляризованного реле, привод робота-манипулятора правого поворота соединен с отрицательным выходом логических элементов контуров курсового и линейного отклонения и привод роботаманипулятора левого поворота соединен с положительными выходами указанных логических элементов, а в блоке управления, соединенном с отрицательным выходом поляризованного реле, привод робота-манипулятора правого поворота соединен с положительным выходом логического элемента контура курсового отклонения и с отрицательным выходом логического элемента контура линейного отклонения и привод робота-манипулятора левого поворота соединен с отрицательным выходом логического элемента контура курсового отклонения и с полежительным выходом логического элемента контура линейного отклонения. На фиг. 1 изображена схема устроиства для автоматического вождения, на фиг, 2 - схема соединения тяги с датчиками, на фиг. 3 - схема взаимодействия элементов системы изменения направления движения, на фиг. - схема функционирования блока формирования логико-вероятностных сигналов. Устройство содержит направляющие, состоящие из натяжных тросов 1,на которые установлены тележки 2,соединенные с системой изменения направления движения, выполненной в виде тяги 3 с рычагом 4, установленным на передней части транспортного средства 5 посредством цилиндрических шарниров 6-8 и снабженным датчиками 9 и Ю курсового отклонения транспортного средства, соединенными через блок 11 формирования логико-вероятностных сигналов с приводами 12-15 роботов-мани-. пуляторов 16 и 17, которые смонтированы на органах управления по повороту 18 и реверсированию 19 транспортного средства. На тяге 3 жестко закреплена параллельная траверса 20, на которой установлен гироскопический шарнир 21, соединенный с возможностью продольного перемещения с дополнительным рычагом 22, который закреплен с возможностью поворота на транспортном средстве и снабжен датчиками 23 и 2k линейно го отклонения транспортного средства. Блок 11 формирования логико-вероятностных сигналов содержит блокзадатчик 25 частоты реверсирования, соединенный через конечный логический элемент 26 типа ИЛИ и поляризованного реле 27 реверса с двумя блоками 28 и 29 управления, канодый из которых соединен с выходом поляри зованного реле 27 через блок-задатчи 30 частоты поворотов. Блок 28 управления состоит из двух последовательно соединенных контуров первый из которых содержит логический элемент 31 курсового отклонения, соединенный с выходом логического эл мента 32 направления поворота, на вы ходе которого включены приводы 12 и 13 робота-манипулятора 16 правого и левого поворотов. Второй контур соде жит логический элемент 33 линейного отклонения, соединенный с входом дру гого логического элемента 3 направления поворота, который также соединен с приводами 12 и 13 робота-манип лятора 16 правого и левого поворотов. Блок 29 управления также состоит из двух последовательно соединенных .контуров, первый из которых содержит логический элемент 35 курсового отклонения, соединенный с входом логи836ческого элемента 36 направления поворота, на выходе которого включены приводы 12 и 13 робота-манипулятора 16 правого и левого поворота. Второй контур содержит логический элемент 37 линейного отклонения, соединенный с входом другого логического элемента 38 направления, поворота, который соединен с приводами 12 и 13 робота-манипулятора 16. Приводы роботов-манипуляторов 12-15 соединены с генератором 39 случайных напряжений через коммутатор 0. При движении транспортного средства 5 по треку направление его движения постоянно, отклоняется от требуемого. При этом изменяются углы между вектором скорости движения тележек 2, тягой 3 и рычагом Ц. Это вызывает переме14ение датчиков 9 и 10 отклонения по курсовому углу относительно транспортного средства. При достижении предельного, заранее заданного угла отклонения транспортного средства по курсовому углу, датчики 9 и 10 подают сигналы блоку 11 формирования логико-вероятностных сигналов. При отклонении транспортного средства по полосе движения изменяется его координата относительно центра трека и гироскопического шарнира 21, Это приводит к повороту дополнительного рычага 22 и датчиков 23 и 2 относительно транспортного средства. При достижении предельного отклонения, заранее заданного с помощью выбора зоны нечувствительности, датчики 23 и 2k подают сигналы блоку 11. Блок 11 функционирует по принципу имитации логико-вероятностного закона управления транспортным средством водителем-оператором, которое может быть описано логико-вероятностной мрделью, имеющей вид W- ian 11 р A atlbou J p4-nPvnMj 5R4dW ic3, Условные обозначения, принятые при составлении модели: (+, 2) - переключение рычага управления механизмом реверсирования (Вперед , Назад);
R(fA, включение рычага управления механизмом поворота направляющих колес (Влево, Вправо);
Р(ул,уп ) удержание рычага управления мexaнизмo 4 поворота направляющих колес в положение Влево, Вправо
PQ- отпускание рычага управления механизмом поворота направляющих колес;.
С- транспортное средство не
достигло конца прохода;
d- выдерживается требуемое
направление движенияJ
) имеется отклонение транспортного средства от требуемого направления движения Вправо, Влево ; Ш - ложное логическое условие.
.Для точной имитации работы операторного управления блок 11 анализирует сигналы, поступающие с датчиков 9, 10, 23, 2k подобно анализу водителем условий d, dp, d, 1, и вы дает соответствующие сигналы на приводы 12-15 роботов-манипуляторов 16 и 17 взаимодействующих с органами управления по повороту 18 и реверсированию 19. При наличии сигнала по курсовому или линейному отклонению блок 11 формирования логико-вероятностных сигналов пропускает посредством поляризованного реле реверса 27 сигналы через блок 28 или 29 в зависимости от направления движения транспортного средства вперед или назад, определяемым конечным логическим элементом 28. Одновременно, поляризованное реле подает сигнал приводу 15 робота-манипулятора реверса 17 для включения органа 19 управления по реверсированию в положение Вперед или Назад. Если транспортное средство движется вперед, сигналы анализируются блоком 28, при этом если есть отклонение по курсовому углу, которое определяется логическим элементом 31 путем опроса датчиков 9 и 10, определяется, какое именно имеется отклонение вправо или влево с помощью логического элемента 32. Если имеется отклонение вправо, то выдается сигнал включения привода 12 робота-манипулятора 16 влво. Если имеется отклонение влево, то выдается сигнал на включение привода 13 робота-манипулятора 16 вправо. Если курсового отклонения нет, то сигналы от датчиков проходят на второй контур к логическому элементу 33 линейного отклонения, который
определяет, имеется линейное отклонение транспортного средства по полосе движения путем опроса датчиков 23 и 2. Если имеется, то определяется, какое именно имеется отклонение логическим элементом 32. Если вправо, то выдается сигнал приводу 21
роботу-манипул я т ору на включение ВлеI .., -. .. ..... во, если влево, то сигнал приводу
13 робота-манипулятора 16 включить
5 Вправо. Если курсового и линейного отклонения не имеется, то выдается сигнал приводу 14 робота-манипулятора 16 возвращения органа 18 управления в нейтральное положе0 ние. После чего цикл анализа повторяется с возвратом в исходное положение к конечному логическому элементу 26. Если конечный логический элемент фиксирует, что имеется на5 правление движения транспортного средства Назад, то сигналы от датчиков сигнализируются блоком 29, ко торый соединен с отрицательным выходом поляризованного реле 27, которое
0 выдает одновременно сигнал приводу 15 робота-манипулятора 17 на переключение рычага реверса 19 в положение Назад. При этом, если имеется курсовое отклонение, определяе5 мое логическим элементом 35, транспортного средства вправо, определяемое логическим элементом 36, то выдается сигнал приводу 13 робота-манипулятора 16 включить рычаг 18 по0 ворота вправо, если влево, то приводу .12 робота-манипулятора 16 включить влево. Если курсового отклонения нет, то анализируется наличие линейного отклонения логическим эле5 ментом 37. Если оно есть, причем
вправо, определенное логическим элементом 38, то выдается сигнал приводу 12 робота-манипулятора 16 включить Влево, если влево, то приводу 13 робота-манипулятора 16 - включить Вправо, Если курсового и линейного отклонения нет, или оно восста.новлено, то снова выдается сигнал приводу Т робота-манипулятора 16 установить орган 18 управления в ней..tpajlbHoe положение. Мосле чего осуществляется возврат к входу конечного логического элемента 26 анализа направления движения,и цикл повторяется .
в общем случае закон логического функционирования блока 11 может быть описан зависимостями
V((X2.Xi) X,,-(X,X,4 XitX5(),
где Х - входные сигналы; Z; выходные сигналы; Z - управляющий сигнал на включение манипулятора управления рычагом реверсирования;
Z - О Вперед, 24 Назад ; 22 1я управляющий сигнал на включение манипулятора управления рычагом поворота; ,2,0- включить привод 13 вправо 7.,Zf1- включить привод 12 влево, li-О, нейтральное положение; входной сигнал - движение
Z, 0
вперёд;
х --/
входной сигнал - движение назад;
не имеется курсового отклонения;
, имеется отклонение вправо; ъ-.Хг-О имеется отклонение влево, - не имеется линейного откло Х5- Онения;
имеется линейное отклонение
вправо; . имеется линейное отклонение
влево.
Действия выполняемые роботами-манипуляторами, имитируются с учетом вероятностных продолжительностей их выполнения. Соблюдается условие
apAv)--f(ton),
где f(tpj) плотность распределения продолжительностей выполнения действий роботами-манипуляторами ; f(tpj) - плотность распределения вероятностей продолжительности действия по переключению органов управления, выполняемых оператором в эксплуата
ЦИИо
Для этого в блоке формирования логико-вероятностных сигналов 11 генератор 30 случайных величин напряже 9383. ,10
ний может быть подключен к любому приводу роботов-манипуляторов с помощью коммутатора 40 и при наличии сигнала в работе привода скорость
5 выполнения операции в данный момент времени будет определяться подаваемым генератором напряжения. Так как напряжение изменяется по любому заранее заданному закону, то операция,
10 выполняемая роботом-манипулятором, имеет верюятностный характер.
Частота реверсирования задается блоком-задатчиком 25, который определяет время задержки прохождения
15 сигналов к конечному логическому элементу 26. Блок может быть выполнен, например в виде реле.временио При увеувеличении времени задержания прохождения сигнала частота реверси2Q рования уменьшается. Частота реверсирований и время задержки определяются по формуле
25 RP ц+to o
где п - частота выполнения операций Р по реверсированию роботомманипулятором-, 1( -время прохождения сигнала без задержки, ц-Бремя задержки; b - постоянная величина;
И
среднестатическая частота
Ron действий по реверсированию оператора в эксплуатации;
. требуемый коэффициент ускорения испытаний.
Частота поворотов катка задается
блоком-задатчиком 30, который определяет время задержки сигналов от датчиков 9, 10, 23 и 2 к логическому элементу контуров курсового
отклонения 31 и 35. При увеличении времени задержки частота поворотов уменьшается по определенной зависимости. Частота поворотов и время задержки определяются выражением
а
- VI (.
Поп VCK)
п - частота поворота робота-ма нипулятора;
время проходэ сигнала без
озадержки, Ц - время задержки; 11 а, е - постоянные коэффициенты, п - среднестатическая частота попм V выполнения действии по по вороту водителем-оператором а эксплуатации SCK Рвбуемый коэффициент уско рения испытаний. Устройство позволяет автоматиче ки производить управление транспорт ным средством с учетом соблодения логико-вероятностного подобия упра лению водителя-оператора. Система автоматического вождения обеспечивает одинаково точное управление транспортным средством, как при дви жении его вперед, так и при движении назадо Это дает возможность про водить испытания машин,, типичными условиями работы которых являются не только повороты, но и реверсирование, в частности дорожных катков. За счет изменения параметров системы можно достигать учащения выполнения операций поворотов, реверсирований в заданных пределах, что позволяет значительно ускорить процесс испытаний. Предлагаемое уст ройство дает возможность точной ими тации факторов, воздействующих на транспортное средство в условиях эксплуатации Это позволяет значительно повысить точность испытаний и достоверность получаемых оценок, При этом может быть снижено количество испытуемых образцов машин, необходимых для пpoвeдeн JЯ испытаний, что снижает затраты на их проведение. Универсальность устройства позволяет применять его при испытаниях разнообразных транспортных средств на треках и испытательных дорогах, а в некоторых случаях и для выполнения машиной работ в автоматическом режиме. Формула изобретения 1. Устройство для автоматического вождения транспортного средства преимущественно дорожного катка, при испытаниях на треке, содержащее направляющие с тележками, шарнирно соединенные тягой с транспортным средством, и систему изменения направления движения, кинематически связанную с органами управления тра спортного средства, отличающееся тем, что, с целью повы ния точности имитации факторов. 3 воздействующих на транспортное средство в условиях эксплуатации, система изменения направления движения выполнена в виде рычага, закрепленного с возможностью продольного перемещения на тяге, соединенного с передней частью транспортного средства посредством цилиндрических шарниров и установленного с возможностью поворота в трех взаимно перпендикулярных плоскостях, и датчиков курсового отклонения транспортного средства,, соединенных через блок формирования логико-вероятностных сигналов с приводами роботовманипуляторов, смонтированных на органах управления транспортного средства. 2. Устройство по п. 1, отличающееся тем, что, оно снабжено траверсой, закрепленной параллельно тяге, гироскопическим шарниром, установленным на траверсе, дополнительным рычагом, закрепленном на транспортном средстве с возможностью поворота в горизонтальной плоскости и соединенным с г фоскопическим шарниром с возможностью продольного перемещения последнего, двумя датчиками линейного отклонения транспортного средства, и блоком формирования логико-вероятностных сигналов, кинематически связанными меноду собой, причем последний выполнен в виде блокаГ-задатчика частоты реверсирования, соединенного через конечный логический элемент типа ИЛИ и поляризованное реле реверса с двумя блоками управления, камздый из которых соединен с выходом поляризованного реле через блок-задатчик частоты поворотов и состоит из двух последовательно соединенных контуров, первый из которых содержит логический элемент курсового отклонения транспортного средства, соединенный с входом логического элемента направления поворота, на выходе которого включены приводы робота-манипулятора правого и левого поворотов, второй - логический элемент линейного отклонения транспортного сресредства, соединенного с входом другого логического элемента направления поворота, также соединенного с приводами робота-манипулятора правого и левого поворотов, при этом приводы робота-манипулятора соединены обратной связью через датчики курсо13 .
вого и линейного отклонения, а выход логических элементов курсового и линейного отклонения соединен обратной связью с входом конечного логического элемента через привод роботаманипулятора возврата органа управления в нейтральное положение.
. Устройство по п, 2, отличающееся тем, что в блоке управления, соединенном с положительным выходом поляризованного реле, привод робота-манипулятора правого поворота соединен с отрицательными выходами логических элементов контура курсового и линейного отклонения и привод робота-манипулятора левого поворота соединен с положительными выходами указанных логических элементов, а в блоке уп/ / J , , , X f X ШШ 1(
9383 I
равления, соединенном с отрицательным выходом поляризованного реле, привод робота-манипулятора правого поворота соединен с положительным
5 выходом логического элемента контура курсового отклонения и с отрицательным выходом логического элемента (Контура линейного отклонения и привод робота-манипулятора левого по10 ворота соединен с отрицательным выходом логического элемента контура курсового отклонения и с положительным выходом логического элемента контура линейного отклонения.
,5 Источники информации,
принятые во внимание при экспертизе
фуг, . X I X ш:
N
