(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАБОТЫ ЭКСКАВАТОРА-ДРАГЛАЙНА
Кроме того блок измерения величин загрузки ковшс1 содержит счетчики, элементы И, два аналого-дискретных преобразователя, подключенных выходами через элементы И к входам соответствующих счетчиков, триггер,один вход которого сослинен с вьлходом пер вого счетчика, ,а его выход подключен к входам элементов И, блок фиксации пространства содержит дешифратор, последовательно соединенные пороговый элемент, элемент задержки времени, триггер и элемент И, реверсивный счетчик, связанный через дешифратор с входом элемента И, при этом соответствующий вход реверсивного счетчика связа.н с входом элемента И, а датчик загрузки ковша содержит сумматор и подключенные к нему две цепочки, каждая из которых содержит последовательно соединенные узел выделения статической составляю щей полного тока двигателя и масштабирующий элемент.
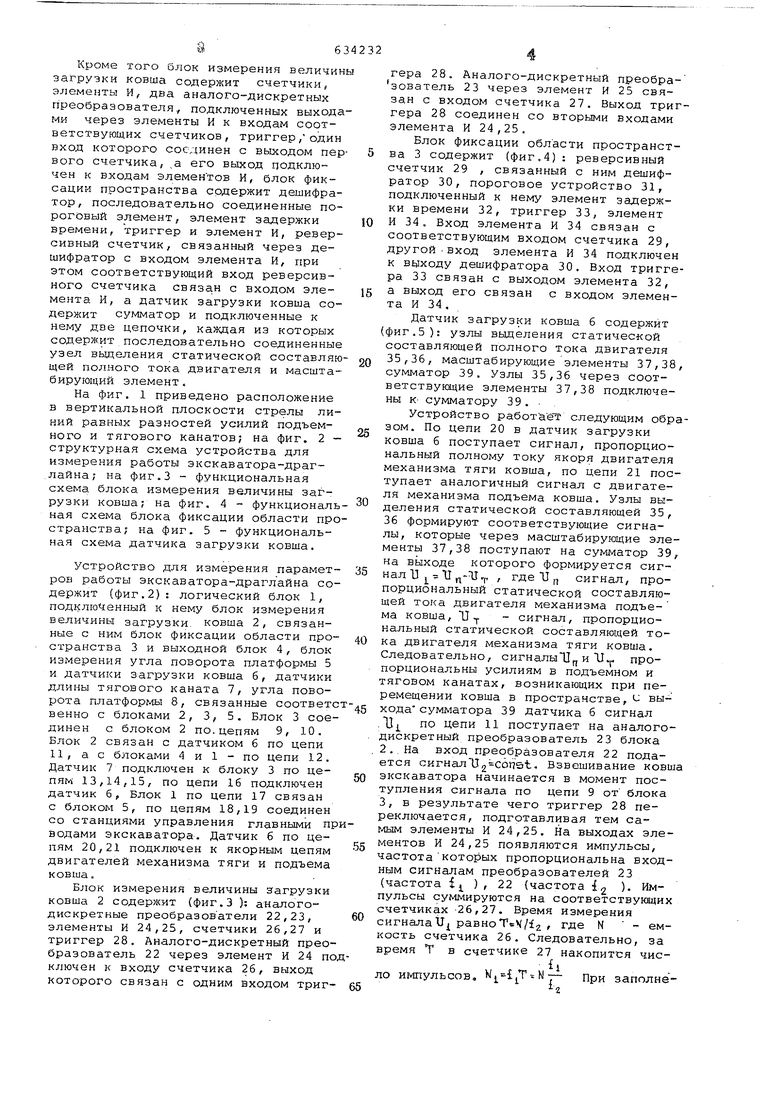
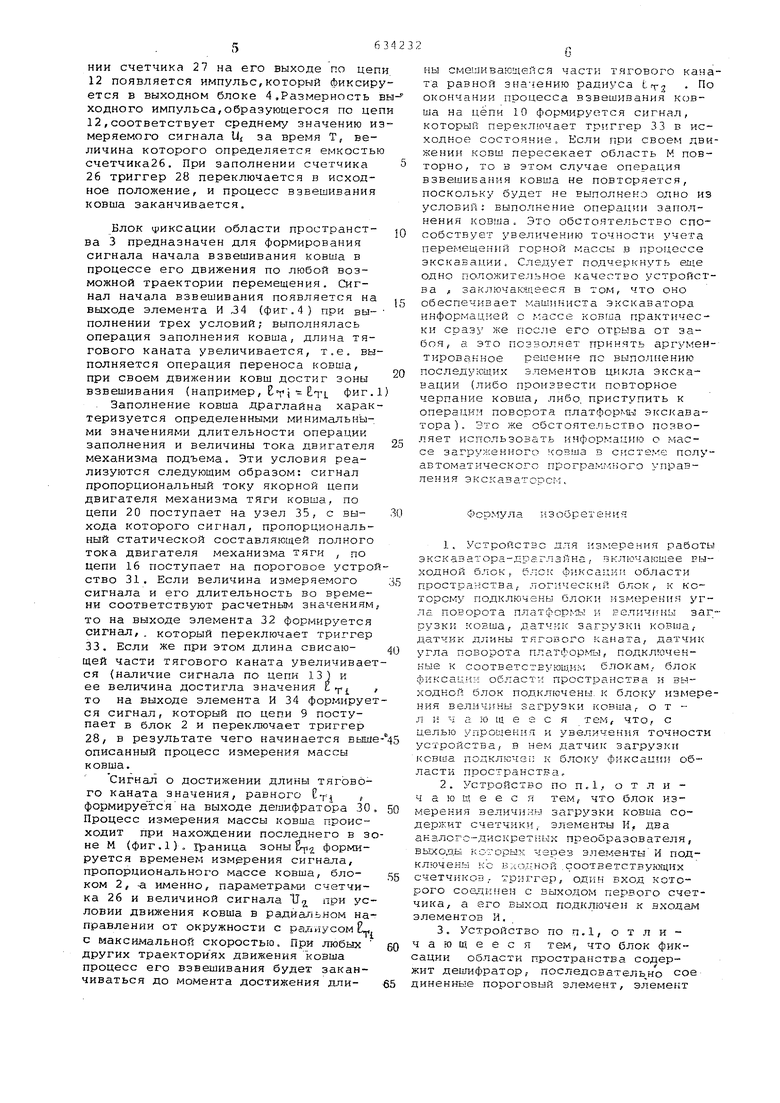
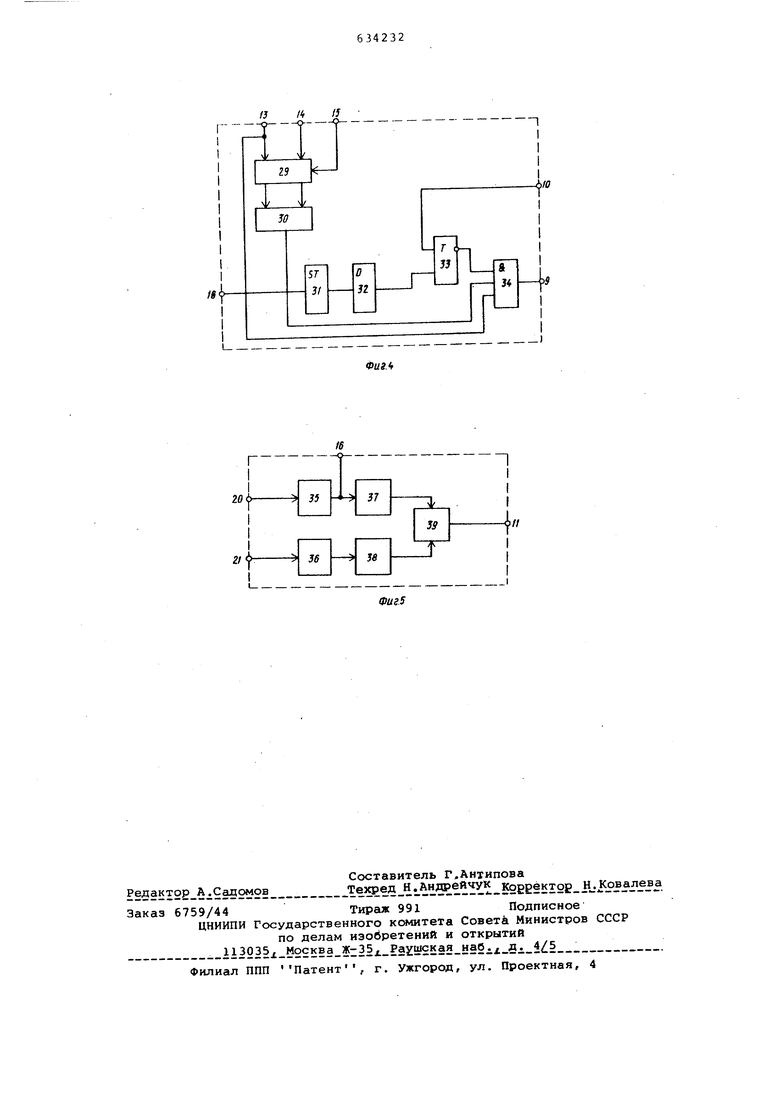
На фиг, 1 приведено расположение в вертикальной плоскости стрелы линий равных разностей усилий подъемнего и тягового канатов; на фиг. 2 структурная схема устройства для измерения работы экскаватора-драг.лайна; на фиг.З - функциональная схема блока измерения величины загрузки ковша; на фиг. 4 - функциональ ная схема блока фиксации области пространства; на фиг. 5 - функциональная схема датчика загрузки ковша.
Устройство для измерения параметров работы экскаватора-драглайна содержит (фиг.2): логический блок 1, подклю 1енный к нему блок измерения величины загрузки, ковша 2, связанные с ним блок фиксации области пространства 3 и выходной блок 4, блок измерения угла поворота платформы 5 и датчики загрузки ковша б, датчики длины тягового каната 7, угла поворота платформы 8, связанные соответс венно с блоками 2, 3, 5. Блок 3 соединен с блоком 2 по.цепям 9, 10. Блок 2 связан с датчиком 6 по цепи 11, ас блоками 4 и 1 - по цепи 12. Датчик 7 подключен к блоку 3 по цепям 13,14,15, по цепи 16 подключен датчик б. Блок 1 по цепи 17 связан с блоком 5, по цепям 18,19 соединен со станциями управления главными прводами экскаватора. Датчик б по цепям 20,21 подключен к якорным цепям двигателей механизма тяги и подъема ковша.
Блок измерения величины Нагрузки ковша 2 содержит (фиг.З ): аналогодискретные преобразователи 22,23, элементы И 24,25, счетчики 26,27 и триггер 28. Аналого-дискретный преобразователь 22 через элемент И 24 пключен к входу счетчика 26, выход которого связан с одним входом триг
гера 28. Аналого-дискретный преобразователь 23 через элемент И 25 связан с входом счетчика 27. Выход триггера 28 соединен со вторыми входами элемента И 24,25.
Блок фиксации области пространства 3 содержит (фиг.4) : реверсивный четчик 29 , связанный с ним дешифратор 30, пороговое устройство 31, подключенный к нему элемент задержки времени 32, триггер 33, элемент И 34. Вход элемента И 34 связан с соответствующим входом счетчика 29, ругой-вход элемента И 34 подключен к ВЫХОДУ дешифратора 30. Вход триггера 33 связан с выходом элемента 32, а выход его связан с входом элемента И 34 .
Датчик загрузки ковша 6 содержит иг.5): узлы выделения статической составляющей полного тока двигателя 35,36, масштабирующие элементы 37,38, сумматор 39. Узлы 35,36 через соответствунадие элементы 37,38 подключены к- сумматору 39. ,
Устройство работает следующим образом. По цепи 20 в датчик загрузки ковша 6 поступает сигнал, пропорциональный полному току якоря двигателя механизма тяги ковша, по цепи 21 поступает аналогичный сигнал с двигатея механизма подъема ковша. Узлы выделения статической составляющей 35, 36 формируют соответствующие сигналы, которые через масштабирующие элементы 37,38 поступают на сумматор 39, на выходе которого формируется сигнал 13 „-U , где 11 f, сигнал, пропорциональный статической составляющей тока двигателя механизма подъема ковша, U - сигнал, пропорциональный статической составляющей тока двигателя механизма тяги ковша. Следовательно, сигналыТ1„ и . пропорциональны усилиям в подъемном и яговом канатах, возникающих при перемещении ковша в пространстве, - выхода сумматора 39 датчика 6 сигнал 1 по цепи 11 поступает на аналогодискретный преобразователь 23 блока 2..На вход преобразователя 22 подается сигнали2 со17а1. Взвешивание ковша экскаватора начинается в момент поступления сигнала по цепи 9 от блока 3, в результате чего триггер 28 переключается, подготавливая тем самым элементы И 24,25. На выходах элементов И 24,25 появляются импульсы, частотакоторых пропорциональна входным сигналам преобразователей 23 (частота j ) , 22 (частота i ). Импульсы суммируются на ссответствуквдих счетчиках -26,27. Время измерения сигналаи равноTeV/f , где N - емкость счетчика 26. Следовательно, за время Т в счетчике 27 накопится число импульсов, Wj jT-N-- при заполнзinНИИ счетчика 27 на его выходе по цеп 12 появляется импульс,который фиксир ется в выходном блоке 4.Размерность ходного импульса,образующегося по це 12,соответствует среднему значению и меряемого сигнала U за время Т, величина которого определяется емкость счетчика26. При заполнении счетчика 26 триггер 28 переключается в исходное положение, и процесс взвешивания ковша заканчивается. Блок фиксации области пространства 3 предназначен для формирования сигнала начала взвешивания ковша в процессе его движения по любой возможной траектории перемещения. Сигнал начала взвешивания появляется на выходе элемента И 34 (фиг.4 ) при выполнении трех условий; выполнялась операция заполнения ковша, длина тягового каната увеличивается, т.е. вы полняется операция переноса ковша, при своем движении ковш достиг зоны взвешивания {например, E-vi -E.TL Фиг. . Заполнение ковша драглайна харак теризуется определенными минимальными значениями длительности операции заполнения и величины тока двигателя механизма подъема. Эти условия реализуются следующим образом: сигнал пропорциональный току якорной цепи двигателя механизма тяги ковша, по цепи 20 поступает на узел 35, с выхода которого сигнал, пропорциональный статической составляющей полного тока двигателя механизма тяги , по цепи 16 поступает на пороговое устро ство 31. Если величина измеряемого сигнала и его длительность во времени соответствуют расчетныг значениям то на выходе элемента 32 формируется сигнал,. который переключает триггер 33. Если же при этом длина свисающей части тягового каната увеличивает ся (наличие сигнала по цепи 13) и ее величина достигла значения L то на выходе элемента И 34 формируе ся сигнал, который по цепи 9 поступает в блок 2 и переключает триггер 28, в результате чего начинается выш описанный процесс измерения массы ковша. Сигнал о достижении длины тягового каната значения, равного f , формируетсяна выходе дешифратора 30 Процесс измерения массы ковша происходит при нахождении последнего в з не М (фиг.1), граница зоны Е-р2 Формируется временем измерения сигнала, пропорционального массе ковша, блоком 2, -s. игленно, napaMeTpaNm счетчика 26 и величиной сигнала ТТ, при условии движения ковша в радиальном направлении от окружности с радиусом Е-. с максимальной скоростью. При любых других траекториях движения ковша процесс его взвешивания будет заканчиваться до момента достижения длины смешивающейся части тягового каната равной значению радиуса .По окончании процесса взвешивания на цепи 10 формируется сигнал, который переключает триггер 33 в исходное состояние. Если при своем лвижении ковш пересекает область М повторно, то в этом случае операция взвешивания ковша не повторяется, поскольку будет не выполнено одно из условий: выполнение операции заполнения KOBiua. Это обстоятельство способствует увеличению точности учета перемещений горной массы в процессе экскавации. Следует подчеркнуть eji;,e одно положительное качество устройства f заключаюцееся в том, что оно обеспечивает машиниста экскаватора информацией о г-шссе ковта практически сразу же после его отрыва от забоя, а это позволяет принять аргументированное решение по выпо.анению последуюш.их элементов экскавации (либо произвести повторкое черпание ковша, либо, приступить к операции поворота платформы экскаватора ). Это же обстоятельство позволяет использовать информацию о массе загруженного козша в системе полуавтоматического программного управления экс ; а в а т со с г-;. Формула 15 3 обр ег е н и я 1.Устройство для из.ерения работы эксказатора-драглэйна, включающее ЕЫходной блок, блек фиксаци области npocTpariCTBa, логический блок, к которому подключекЕй блоки )3 ;ерекия Srла поворота платформы и EeличlПiЫ загpy3Ksi козша, датчик загрузкИ ковша, датчик ддлины тпгового каната, датчик угла поворота плагфор.ы, подключенные к соответстЕующик; блокам,- блок фиксации области пространства н выходной блок подключены, к блоку измерения величины загрузки ковша, о т л н ч а ю щ a е с я тем, что, с целью упрощен 5Я и узеличекия точности устройства, в нем датчик загрузки ксвша 11одключе;; к блоку фиксацигз области пространства, 2.Устройстрзо по п. 1,. о т л и ч а ю ш е е с я тем, что блок измерения величины загрузки ковша содержит счетчики, элементы И, два акалогс-дискретмых преобразователя, выходы когорых через элементы И подключены ко В.1О1.ГНОЙ .соответствующих счетчикоз, триггер, одни вход котоого соединен с выходом первого счетика, а его .выход подк;7ючеи к входам элементов И, 3.Устройство по П.1, отлиающееся тем, что блок фикации области пространства содерит дешифратор,- после.довательно сое иненные пороговый элемент, элемент задержки времени, триггер и элемент И, реверсивный счетчик, связанный через дешифратор с входом элемента И, соответствукадий вход реверсивного счетчика свяэан с входом элемента И. 4. Устройство, по пЛ, от л и ч.ающееся тем/ что датчик загрузки ковша содержит сумматор и подключенные к нему две цепочки, каждая 63 е из которых содержит последовательно соединенные узел вьщеления статической составляющей полного тока двигателя и масштабирующий элемент. Источники информации, принятые во внимание при экспертизе: 1 Авторское свидетельство СССР 324527, кл. Q 01 е, 5/00, 1970, 2. Авторское свидетельство СССР W 339904, кл. Q 05 В 13/00, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения веса ковша экскаватора-драглайна | 1976 |
|
SU662820A1 |
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Устройство для учета работы транспортного оборудования | 1984 |
|
SU1182123A2 |
| Устройство для взвешивания ковшадРАглАйНА | 1979 |
|
SU804775A1 |
| Устройство для измерения работы экскаватора драглайна | 1976 |
|
SU737575A2 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| УСТРОЙСТВО для КОНТРОЛЯ РАБОТЫ ЭКСКАВАТОРА | 1972 |
|
SU327306A1 |
| Устройство для контроля работы экскаватора-драглайна | 1976 |
|
SU643597A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Способ определения массы ковша экскаватора-драглайна | 1978 |
|
SU861485A1 |
И 9
Фигз
/J /4 /5
Г
20
