1
Изобретение относится к области управления грузонесущими средствами, в частности к устройствам управления перемещением релюнтной люльки вдоль вентиляционной башни в вытяжном пластмассовом стволе и может, кроме-того, применяться в системах адресования машиностроительной промышленности, а также в строительстве при монтаже сооружений с применением подвесных подъемно-транспортных устройств.
Известны устройства для адресования грузонесуш;его органа, включаюш,ие установленный на грузонесуш,ем органе магнит, разнесенные поперек движения грузонесущего органа герконы, группами расположенные у каждого из мест адресования, исполнительное реле и сигнальный прибор.
Однако в таких устройствах зона действия магнита превышает максимальное расстояние между герконами, что затрудняет достижение повышенной точности адресования с ограниченной зоной действия магнита, особенно при поперечных колебаниях грузонесупдего органа к нодвешенном состоянии.
Для устранения неточности считывания с ограниченной зоной действия млгиита при поперечных колебаниях грузонесущего органа с гибкой подвеской в нредлагаемое устройство введены реле счета импульсов и реле - повторители, причем с каждой группой герконов последовательно соединена обмотка соответствующего этой группе реле - повторителя, а нормально закрытые ко1ггакты этих реле соединены последовательно друг с другом
п параллельно нормально закрытому контакту реле счета импульсов.
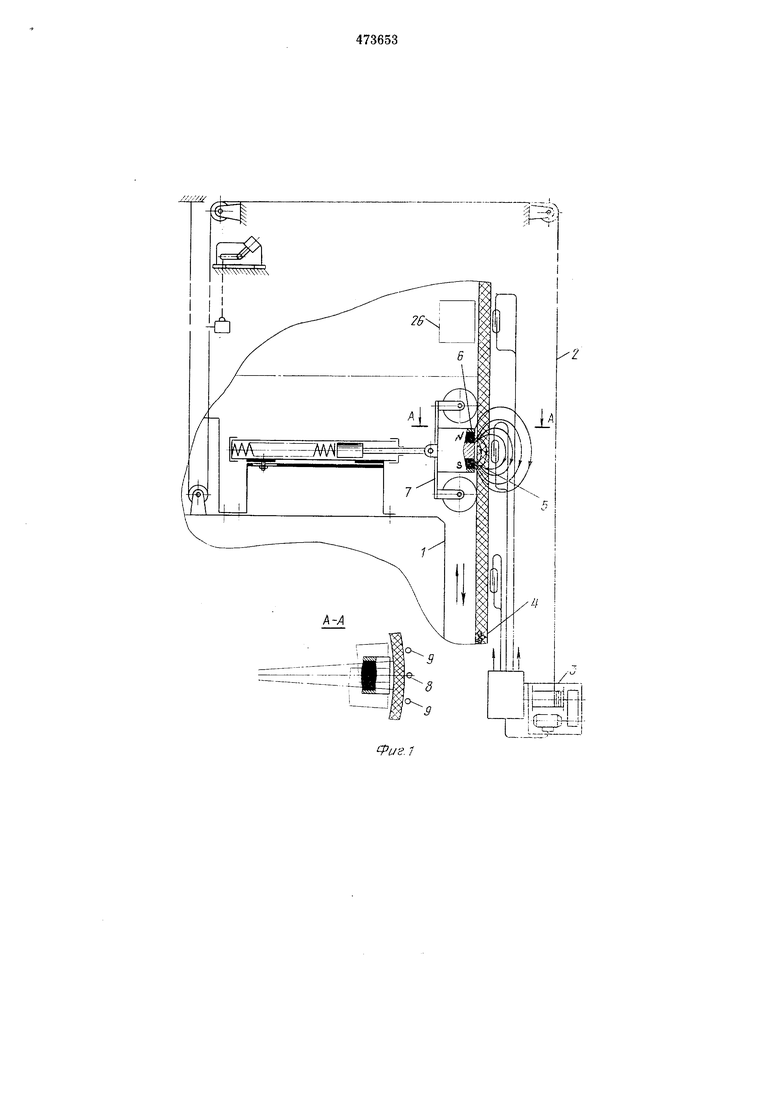
Ыа фиг. 1 показано опнсыраемое устройство, общий вид и разрез по А-А; на фиг. 2 - электрическая с.хема устройства; на фиг.
3 - схема соединения контактов реле - повторителя с реле счета импульсов н исполнительным реле.
На грузонесущем органе 1, который при помощи гибкой подвески 2 лебедкой 3 перемеп1ается вдоль выполнеиной из немагнитного материала стенкн 4, установлен электромагнит 5, помещенный в экран 6. Послед.-nni расположен на подпружиненной карет1-.е 7, контактирующей с внутренней поверхностью
стенки 4.
Поперек пути следования грузонесущего органа 1, разнесен) герконы 8 н 9, нредназиаченные для Бзан: 1одействия -с электромагннтом 5. Герконы 9 сгрунпироваиы и параллелыю нодключены к герконам 8. Каждая группа герконов 8 п 9 носледовательно соедннена с обмоткпмн реле - повторителей 10, а герконы - с ветвями 11, нрн помощи которых возможно ноочередное подключение герконов к сигнальной лампе 12 при обесточиваНИИ реле-повторителей 10 переключателем 13. Реле 10 последовательно соединенными нормально замкнутыми контактами 14 включены в цепь питания исполнительного реле 15, выполиенного в виде катушек 16 и 17 реверсив- 5 пого пускателя привода лебедки 3 и содержащего для блокировки привода лебедки блок - контакты 18. Параллельно контактам 14 через переключатель 19, имеющий положения автоматического и полуавтоматического Ю режимов работы устройства, подключены . мально закрытый контакт 20 реле 21 счета импульсов и нормально открытый контакт кнопки 22. Импульсы счета в реле 21 поступают с параллельно подключенных нормаль- 15 но открытых контактов 23 реле-повторителей 10. Последние также содержат нормально открытые контакты 24 в цепях питания ламп 25, ипдицирующих расположение грузонесущего органа 1. Реле 21 счета импульсов с 20 нормально закрытым контактом 20 предназначено для блокировки привода лебедки 3 в режиме автоматического адресования грузонесущего органа 1, а нормально открытый контакт кнопки 22 - для блокировки приво- 25 да в режиме полуавтоматического адресования грузонесущего органа 1. Для остановки грузонесущего органа в промежуточных положениях между герконами 8 и 9 устройство содержит дополнитель- ЗО ный магнит 26. Устройство работает следующим образом. В зависимости от выбранного работы устройства устанавливают переключатель 19 в соответствующее положение. Для авто- 35 матического режима работы настраивают реле 21 на счет импульсов, соответствующий адресу следования грузонесущего органа I, и в зависимости от направления продольного движения последнего включают нитание ка- 40 тущки 16 или 17 пускатели привода лебедки 3. Грузонесущий орган 1, перемещаясь вдоль стенки 4, замыкает электромагнитом 5 герконы 8 и 9, сигналы которых через контакты реле - повторителей 10 в виде импульсов по- 4.5 следовательно поступают в реле 21. По завершепии отсчета импульсов контакт 20 реле 21 размыкается, катушка пускателя обесточивается и привод лебедки 3 останавливается. Место остановки грузонесущего органа I контролируют при помощи сигнальных ламп 25. Для уточнения положения грузонесущего оргапа 1 в поперечном направлении, к соответствующим ветвям И, определяемым индипированием одной из сигнальных ламп 25, поочередно подключают лампу 12. В полуавтоматическом режиме адресования перемещение грузонесущего органа 1 от одной к другой группе герконов 8 и 9 производят одновременным замыканием нормально открытого контакта кнопки 22 и подачей питания на соответствующую в зависимости от ианравления двил :ения грузонесущего органа 1 катушку пускателя. При этом в течение всего нериода адресования чередуют замыкания нормально открытого контакта кнопки 22 со срабатываниями герконов при помощи нормально замкнутых контактов 14 реле-повторителей 10, разрывающих цепь питания катущек пускателя привода лебедки 3. Предмет изобретения Устройство для адресования грузонесущего органа, включающее установленный па грузонесущем органе магнит, разнесенные поперек движения грузонесущего органа герконы, группами расположенные у каждого из мест адресования, исполнительное реле и сигнальный прибор, отличающееся тем, что, с целью устранения неточности считывания с ограниченной зоной действия магнита при поперечных колебаниях грузонесущего органа с гибкой подвеской, в него введены реле счета импульсов и реле - повторители, причем с каждой группой герконов последовательно соединена обмотка соответствующего этой группе реле - повторителя, а нормально закрытые контакты этих реле соединены последовательно друг с другом и параллельно пормально закрытому контакту реле счета импульсов.
I-Уг
-1- (Г-f; I I
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресования грузо-НОСиТЕля | 1979 |
|
SU812676A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
| Канатно-ленточный транспортер | 1959 |
|
SU126787A1 |
| Устройство для избирательногоупРАВлЕНия РЕВЕРСиВНыМи дВуХпОзициОН-НыМи элЕКТРОпРиВОдАМи | 1976 |
|
SU842759A1 |
| Устройство для адресования грузоносителя | 1980 |
|
SU931607A1 |
| Устройство для аварийной сигнализации, блокировки и защиты | 1986 |
|
SU1483473A1 |
| Полуавтоматический распределительный конвейер с бесконтактным адресованием | 1972 |
|
SU495250A1 |
| ПАТЕНТНО- ,,,., i ^^ Т1;ХКИПЕС1;Л:^ ^^' БИЕ.^ПОТг-КА | 1966 |
|
SU181310A1 |
| Полуавтоматический распределительный конвейер | 1973 |
|
SU518433A1 |
| Путевой переключатель | 1972 |
|
SU577577A1 |

-aJLff Y
