(54) УСТРОЙСТВО ДЛЯ АДРЕСОВАНИЯ ГРУЗОНОСИТЕЛЯ 12
Изобретение относится к внутрифабричному транспортированию с автоматическим адресованием транспортных средств и может быть применено в текстильной и других отраслях проьфаштенности.
Известно устройство для адресования грузоносителя, содержащее гщресователи грузоносителя и кранбалки, расположенные вдоль пути их перемещения, считыватели адреса грузоиосителя и кран-балки с блоком управле ния, размещенные на грузоносителе и выполненные в виде конечных выключателей, установленных подвижно на винтах, расположенных перпендикулярно друг другу, кинематически связанных с электроприводами их перемещения и включенных соответственно в цепь привода грузоносителя и кран-балки, причем винт считывателя кран-балки выполнен с противоположными резьбами на концах I.
Недостатком известного устройства является невозможность автоматического управления считывателями для задания адреса централизованного учета транспортируемого и складируемого груза, поскольку оператору необходимо каждому грузоносите-;
лю вручную задать адрес и отправить его на заданную позицию.
Цель изобретения - повышение удобства эксплуатации.
Поставленная цель достигается тем, что блок управления считывателями содержит геркоиы, кинематически связанные с соответствукяцим электроприводом, снабженным конечtoными выключателями его реверса, и включенные в цепь привода грузоносителя, а также электромагниты, установленные вдоль пути перемещения грузоносителя в зоне задания
15 адреса и взаимодействующие с соответствукнаими герконами, и узел отключения электромагнитов, причем устройство снабжено механизмами выключения грузоносителя в зоне зада20ния адреса и реле времени с контактами, включенными в цепи привода грузоносителя и считывателей грузоносителя и кран-балки.
При этом механизм выключения гру25зоносителя в зоне задания адреса выполнен на установленном на грузоносителе конечном выключателе, включенном в цепь привода грузоносителя.
На фиг.1 изображено взаимное рас30положение элементов устройства, вид
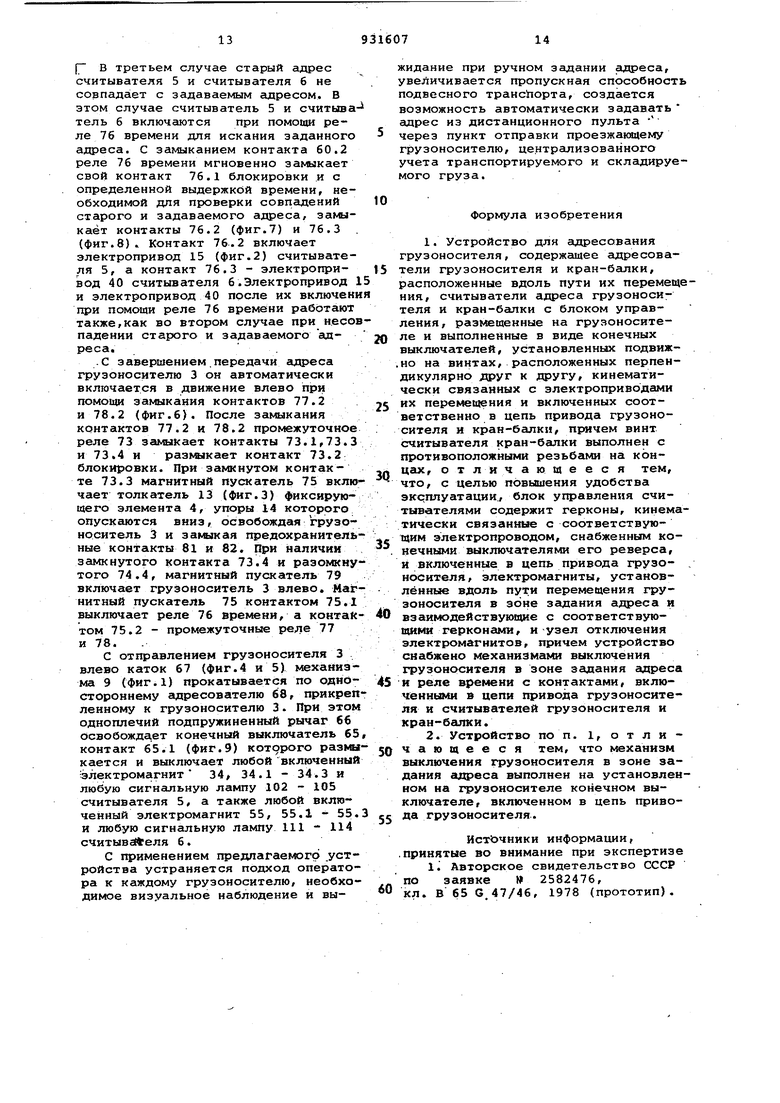
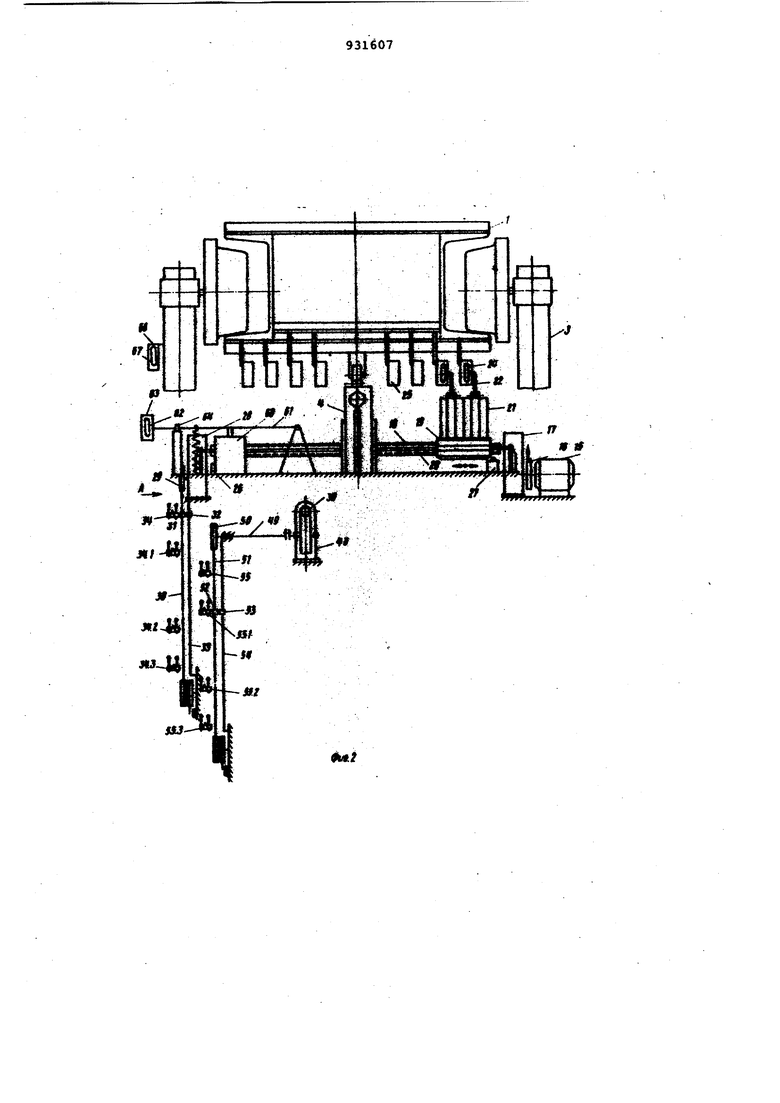
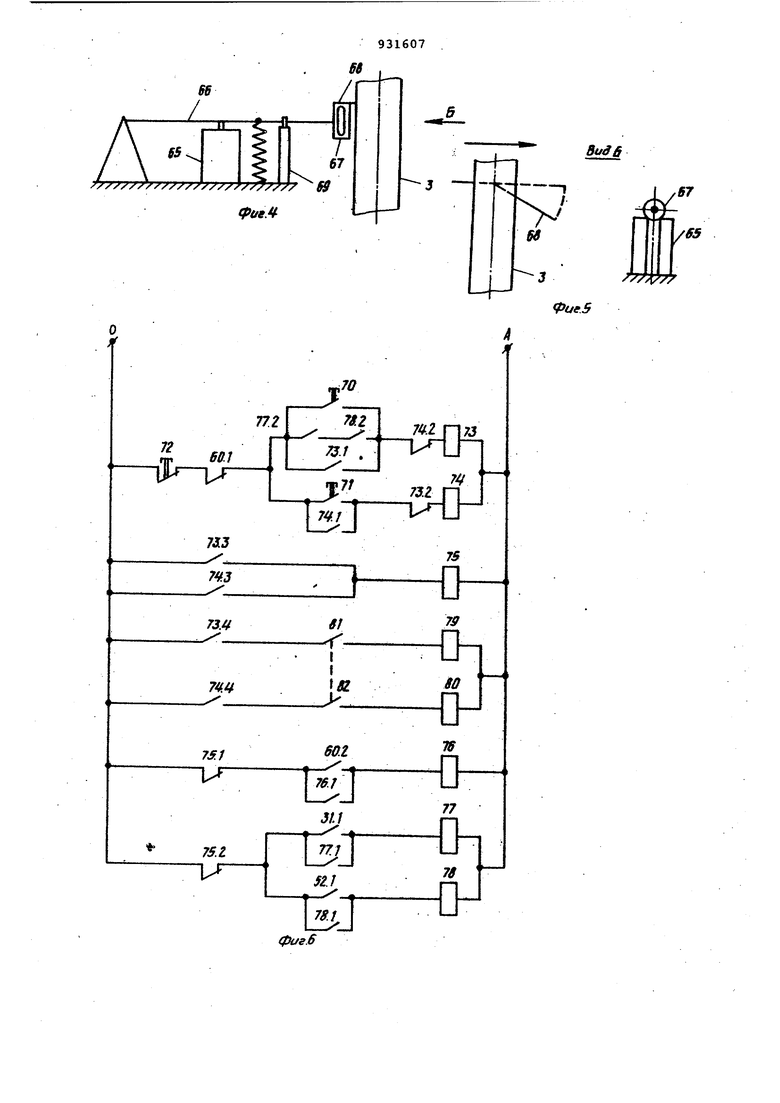
сверху; на фиг.2 - расположение элементов устройства на грузоносителе. вид сзади; на фиг.З - вид А на фиг.2; на фиг.4 - механизм для вы-. ключения электромагнитов; на фиг.5 вид Б на фиг.4; на фиг.б - электрическая схема управления грузоносителем; на фиг.7 - электрическая схема управления считывателем грузоносителя; на фиг.З - электрическая схем управления считывателем кран-балки, на фиг.9 - электрическая схема упраления электромагнитами.
устройство состоит из подвесног пути 1 (фиг.1 и 2) и кран-балок 2, 2.1 - 2.4 (кран-аблки 2.1 - 2.4 установлены влево за кран-балкой 2 и на фиг.1 не показаны), составленных из двух швеллеров, соединенных угольниками,грузоносителя 3,имеющего возможность двигаться по подвесному пути 1 и кран-балкиi 2.1 2.4, фиксирующего элемента 4, предназначенного для точного фиксирования грузоносителя 3 на подвернем пути 1 и кран-балкам 2.1 - 2,4, считывателя 5 адреса грузоносителя, считывателя 6 адреса кран-балки (на фиг.1 обведен штрих-пунктирной линией), механизма 7 для выключения грузоносителя в зоне 8 задания координатного адреса груэоносителю (границы зоны 8 вдоль направления движения грузоносителя 3 равняются длине грузоносителя и на фиг.1 указаны размерной стрелкой), механизма 9 для выключения электромагнитов из дистанционного пульта 10.
Устройство иредиаэиачено для автоматизации задания координатного адреса из дистанционного пульта 10 грузоносителю Зу распределяющему груз по станкам, расположенным в комплексах по 150 - 160 станков в каждом. Комплексы 11,11.1 - 11;4 станков расположены в пролетах, обслуживаемых кран-балками 2,2.1 2.4, именйдими возможность стыковаться посредством переходных межпролетных мостиков в одну линию с монорельсовым путем 1 (комплексы 11.1 - 11.4 станков в пролете установлены ниже комплекса 11 и на фиг.1 не показаны). При необходимости число обслуживаемых пролетов и число комплексов станков в пролете может быть увеличенным или уменьшенным.
Фиксирующий элемент 4 предназнач| н для точного фиксирования грузоносителя 3 в зоне 8, указанном размерной стрелкой, относительно ролика 12 (фиг.З), прикрепленного к подвесному пути 1 снизу. Исполнительным механизмом фиксирующего элемента 4 является толкатель 13, управляющий упорами 14, взаимодействущими с роликом 12. Кран-балки 2,
2.1 - 2.4 стыкуются тоже при помощи фиксирующего элемента 4. При этом фиксирующие элементы 4 устанавливают на обоих концах кран-балки,. а ролик 12 крепят к конструкции здания.
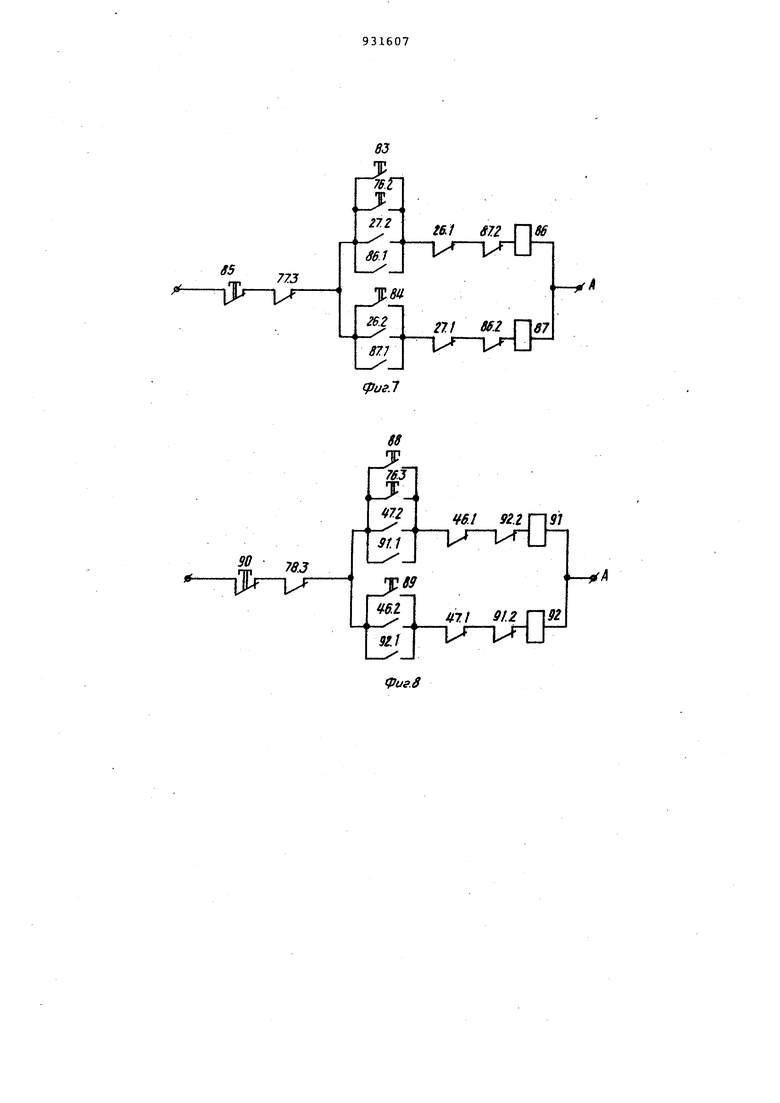
Считыватель 5 адресования грузоносителя 3 состоит из электропривода 15 (фиг.2), тормоза 16, редуктора 17, винте 18, на резьбе которого надето основание 19, поддерживаемое скользящими упорами 20 (фиг.З), На основании 19 установлены два конечных выключателя 21, каждый из которых кинематически связан с подпружиненным рычагом 22, поддерживаемым телескопической направляющей 23. На свободном конце рычага 22 надет каток 24, взаимодействующий с адресователями 25 (фиг.2), установлeнньDJIи на пути движения грузоносителя 3, т.е, на кран-башках 2,2.1 2.4, Для реверсирования электропривода 15 установлены конечные выключатели 26 и 27 с контактами соответственно 26.1 - 26.2 и 27.1 - 27.2 (фиг.7). Конечные выключатели 26 и 27 взаимодействуют с основанием 19, Левый конец винта 18 кинематически связан при помощи редуктора
28 и звездочки 29 с цепью 30, к
которой гфикреплен геркон (магнитоуправляёмый контакт) 31 с контактом 31.1 (фиг.6). Для стабильности геркон 31 соединен с ползуном 32, перемещаемым по штоку 33. С герконом 31 взаимодействуют электромагниты 34, 34.1 - 34.3 постоянного тока (электррмагнит 34.4 на фиг.З не показан), установленные на пути движения грузоносителя 3 в зоне 8
(фиг.1) задания адреса и соединенные при помощи проводов 35 с дистанционным пультом 10i Установка электромагнитов 34, 34.1 - 34.3 по направлению движения грузоносителя 3
согласована с фиксированным положением грузоносителя в зоне 8, а по направлению переме1«ения геркона 31 (фиг,2 и 3) - с положениями геркона 31, в которых он находится при
совпсвдении катков 24 с адресователями 25 задаваемого адреса. Цепь 30 (фиг.З) кинематически связана с цепью 36, в которой прикреплен указатель 37 на контрольной линейке
38,показывающий совмещение катков 24 (фиг.2) с адресователями 25 соответствующим кран-балок 2, 2.4. На линейке 38 указаны номера пролетных кран-балок 2, 2.1 - 2.4, .
На которые направляется грузоноситель 3. .
Считыватель 6 (фиг.1) адресования кран-балкн 2, 2,1 - 2.4 выполнен аналогично считывателю 5 адресования грузоносителя 3. Винт 39
считывателя 6 на грузоносителе расположен перпендикулярно винту 18 (фиг.2) считывателя 5. Винт 39 приводится во вращение при ПОМОЕЦИ электропривода 40 (фиг.1). Для искания заданного адреса на одном конце винта 39 нарезана правая резьба, а на другом - левая. На резьбах обоих концов винта 39 надеты основания 41, При вращении винта 39 в одном направлении оба основания сближаются друг с другом, а в противоположном - удаляются друг от друга. На основаниях 41 установлено по одному конечному выключателю 42, кинематически связанному с подпружиненным рычагом 43, каток 44 которого взаимодействует с путевыми алресователями 45, установленными по обоим концам кран-балки 2, 2.1 2.4. Для реверсирования, электропривода 40 установлены конечные выключатели 46 и 47 с контактами соответствеино 46.1 - 46.2 и 47.1 47,2 (фиг.8). Выключатели 46 и 47 взаимодействуют с основанием 41. Винт 39, при помощи редуктора 48 (фиг.1 и 2), вала 49, звездочки 50 кинематически связан с цепью 51,к которой прикреплен геркон 52 с контактом 52.1 (фиг.6). Для стабильности геркон 52 (фиг.2) соединен с ползуном 53, перемещаемым по щтоку 54. С герконом 52 взаимодействуют электромагниты 55, 55.1 - 55.3 постоянного тока, установленные на пути движения грузоносителя 3 в зоне 8 (фиг.1) и соединенные при помощи проводов 56 с дистанционным пультом 10. Установка электромагнитов 55, 55.1 - 55.3 по направлению движения грузоносителя 3 согласована с фиксированным положением грузоносителя в зоне 8, а по направлению перемещения геркона 52 - с положением геркона 52, в котором он находится при совпадении катка 44 с адресователями 45 задаваемого адреса Цепь 51 (фиг.З) кинематически связана с цепью 57, к которой прикреплен указатель 58, показывающий на контрольной линейке 59 совпадение катка 44 (фиг.1) с адресователями 45,установленными, на соответствующих комплексах 11, 11.1 -11.4 станков. На линейке 59 (фиг.З) указаны номера комплексов 11, 11.1 - 11.4 станков в пролете.
Механизм 7 (фиг.1) для выключения грузоносителя 3 в зоне 8 задания адреса состоит из конечного выключателя 60 (фиг.2) с контактами 60.1 - 60.2 (фиг.6). Конечный выключатель 60 установлен на грузоносителе 3 и кинематически связан с подпружиненным одноплечим рычагом 61, на свободном конце которого установлен каток 62, взаимодействующий с односторонним адресователем 63 (фиг,1 и 2), установленным на пути движения грузоносителя 3. Рычаг 61 поддерживается телеско-: пической направляющей 64.
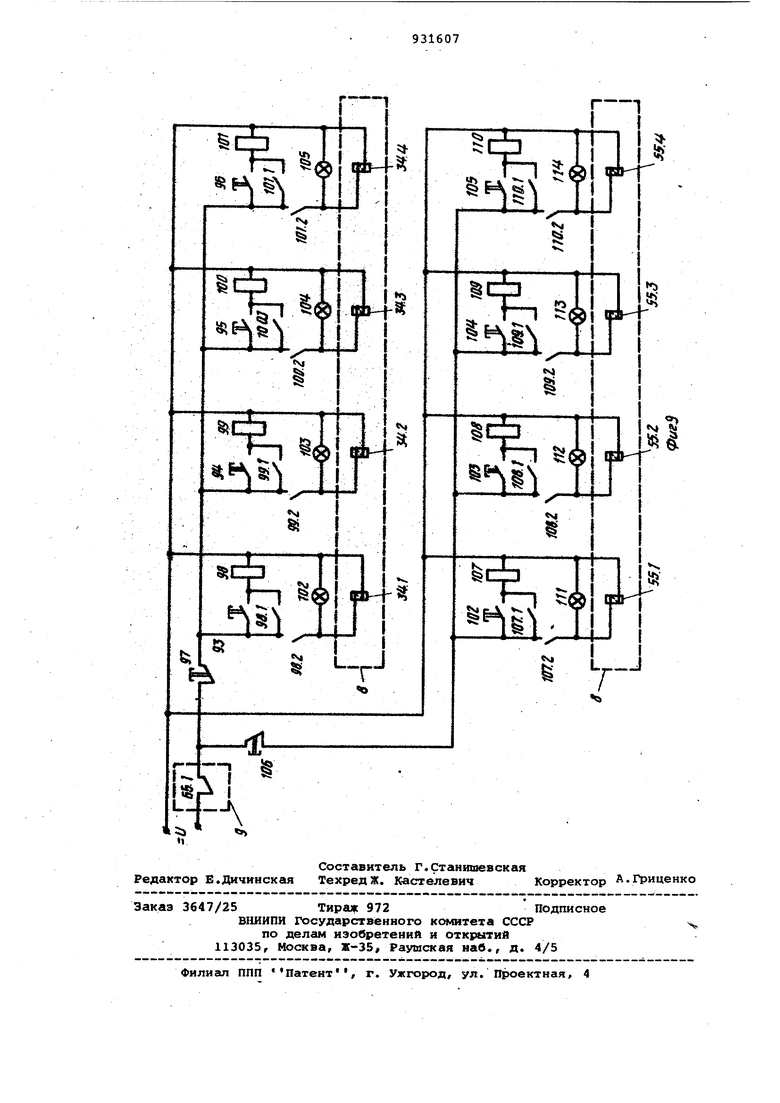
Механизм 9 (фиг.1) выключения электромагнитов 34, 34.1 - 34.3 и 55, 55.1 - 55.3 (фиг.1 - 3 и 9) при отправке грузоносителя 3 после задания адреса состоит из конечного выключателя 65 (фиг.4 и 5) с контактом 65.1 (фиг.9). Конечный вы,0ключатель 65 установлен на пути движения грузоносителя 3 за зоной 8 задания адреса. Конечный выключатель 65 кинематически связан с подпружиненным одноплечим рычагом 66
5 (фиг.4), на свободном конце которого установлен каток 67, взаимодействующий с односторонним сщресователем 68, установленным на грузоносителе 3. Рычаг 66 поддерживается
0 телескопической направляющей 69.
Ручное включение грузоносителя 3 для движения соответственно влево и вправо осуществляется с помощью
5 кнопок 70 и 71 пуска (фиг.6), а его выключение - при помощи кнопки 72 Стоп. Промежуточные реле 73 и 74 с контактами соответственно 73.1 - 73.4 и 74.1 - 74.4 предназ0начены для включения грузоносителя соответственно влево и вправо. Магнитный пускатель .75 с контактами 75.1 - 75.2 предназначен для включения толкателя 13 (фиг.З) фик5сирующего элемента 4 и выключения реле 76 времени, а также промежуточных реле 77 и 78. Магнитные пускатели 79 и 80 предназначены для включения электропривода передвиже0ния грузоносителя 3 соответственно влево и вправо. Предохранительные контакты 81 и 82 фиксирующего элемента 4 служат для предотвращения преждевременного включения грузо5носителя 3 тогда, когда он не освобожден этим фиксирующим элементом. Реле 76 времени с контактами 76.1 (фиг.6), 76.2 (фиг.7) и 76.3 (фиг.8) предназначено для выдержки включения электропривода 15
0 (фиг.2) считывателя 5 и электропривода 40 (фиг.1) считывателя 6 с момента выключения грузоносителя 3 до опознания адреса, т.е. до прохода грузоносителем 3 при амор5тизационном торможении его фиксированного (среднего) положения в зоне 8 относительно упорного ролика 12 (фиг.З). Промежуточные реле 77 и 78 с контактами соответственно
0 77.1 и 77.2 (фиг.6) и 77.3 (фиг.7), а также 78.1 и 78.2 (фиг.6) и 78.3 (фиг.8) предназначено для подготовки включения электропривода передвижения грузоносителя 3 и для вы5ключения соответственно электропривода 15 считывателя 5 и электропри вода 40 счит ывателя 6. Ручное включение электропривода 15 для передвижения основания 19 соответственно влево и вправо ос ществляется с помощью кнопок 83 и 84 пуска (фиг.7), а его выключение при помощи кнопки 85 Стоп. Маг нитные пускатели 86 и 87 с контактами соответственно 86.1, 86.2 и 87.1,87.2 предназначены для включ ния электропривода 15 для передвижения основания 19 соответственно влево и вправо. Контакты 26.1, 26. и 27.1, 27,2 конечных выключателей 26 и 27 (фиг.2) предназначены для реверсирования электропривода считывателя б. Ручное включение электропривода 40 для сближения оснований 41 друг с другом для их удаления друг от друга выполнено с помощью кнопок пуска соответственно 88 и 89 (фиг.8 а его выключение - при помоши кн ки 90 Стоп. Магнитные пускатели 91 и 92 с контактами соответственно 91.1, 91.2 и 92.1, 92.2 Предназ начены для включения электропрИвола 40 соответственно для сближения ос нований 41 друг с другом и для их удаления друг от друга. Контакты 46.1 - 46.2 и 47.1 - 47.2 конечных выключателей 46 к 47 предиазначены для реверсированьЯ электроиривода 40. Включение электромагнитов 34, 34.1 -34.3 осуществляется с помощь кнопок 93 - 96 пуска (фиг.9), а выключение этих магнитов - с помощью кнопки 97 Стоп. Реле 98 - lOl с контактами соответственно 98.1 и 98.2,99.1 и 99.2, 100.1 и 100.2, 101.1 и 101.2 предназначейы для включения электромагнитов 34, 34.1 34.3 (омическое сопротивление) и сигнальных ламп 102 - 105. Включение электромагнитов 55, 55.1 - 55.3 считывателя 6 осуществ ляется с помощью кнопок пуска соответственно 102 - 105, а выключени этих магнитов - с помощью кнопки 106 Стоп. Реле 107 - 110 с контактами соответственно 107.1 и 107 108.1 и 108.2, 109.1 и 109.2, 110.1 и 110.2 предназначены для включения электромагнитов 55.1 - 55.4 и сигнальных ламп 111 - 114. Электромагниты 34, 34.1 - 34.3 и,55, 55.1 - 55.3 установлены.на пути 1рузоносителя в зоне, а конечный выключатель 65 с контактом 65.1 установлен на пути грузоносителя в механизме 9. все остальные коммутирующие устройства, показанные на фиг.9, установлены в пульте 10 задания адреса. Устройство работает следующим образом. Перед подходом грузоносителя 3 (фиг.1) по подвесному пути 1 справа к зоне 8 для задания адреса в пульте 10 оператор замыкает одну из кнопок 93 - 96 (Фиг.9) включения электромагнита соответственно 34, 34.1 - 34.3 считывателя 5 и одну из кнопок 102 - 105 включения электромагнита соответственно 55, 55.1 55.3 считывателя 6. Например, для направления грузоносителя 3 в первом пролете на второй комплекс станков, т.е.. на кран-балку 2 (фиг.З) и комплекс 11.1 станков, оператор замыкает кнопки 93 и 103. При этом включаются электромагниты 34 и 55.1 и зажигаются сигнальные лампы 102 и 112. При неправильном нажатии кнопки 93 оператор нажимает кнопку 97 для выключения неправильно включенного электромагнита 34, а также сигнальной ламгад 102 и затем повторяет нажатие кнопки 93. При помощи кнопки 97 выключателя, любой электромагнит 34, 34.1 - 34.3 для поправки включения необходамого электромагнита счи гывателя 5. Аналогичйо оператор поправляет любой неправильно включенный электррмагнит 55, 55.1 - 55.3 считывателя б при помощи кнопки 106 выключенйя. После набора оператором координатного адреса при помощи нажатий кнопок 93 и ЮЗ дальнейша1Я переда- . ча алреса. грузоносителго 3, т.е. остановка груэоносителя 3 в зоне 8, бесконтактная передача адреса и его отправка происходит полностью автоматически. При подходе грузоносителя 3 (фиг.1) к зоне задания адреса, грузоноситель вьжлючается при помощи механизма 7 При этом каток 62 (фиг.2 и 3) прокатывается по адресоваТелю 63 (фиР.1) и освобождает конечный выключатель 60. Контакт 60.1 (фиг.б) гьключаёт грузоноситель 3, а контакт 60,2 включает, реле времени 7б.ч С размыканием контакта 60.1 промежуточное реле 73 контактом 73.3 выключает магнитный пускатель 75 толкателя 13 (Фиг.З) фиксирующего элемента 4, а контакт 73,4 выключает Магнитный пускатель 79 привода грузоносителя 3. С выключением толкателя 13 упоры 14 фиксирующего элемента 4 поднимается вверх,останавливают и точно фиксируют грузоноситель 3 в зоне 8 относительно упорного ролику 12. При амортизационном торлюжении грузоноситель 3 сразу не останавливается в фиксированном положении,а перемещается вперед, возвращается назад и затем уже останавливается в фиксированном положении грузоносителя ролик 62 сплошной линией показан в фиксированном положении, а штриховой ли нией - в положении, перемещенном вперед). После выключения груэоносителя при помощи конечного выключателя 6 непосредственно включать электропривод 15 считывателя 5 и электропривод 40 (фиг.1) считывателя6 нецелесообразно, ввиду того, что . старый адрес не сбрасывается, число комплексов станков является неСолыиим, следовательно, не исключена вероятность того, что старый адрес одного или обоих считыва телей совпадет с задаваекым адресом. Поэтому при помощи реле 76 вр мени (фиг.6) задерживается включение электроприводов 15 и 40 до тех пор, пока геркон 31, вэаимодействующий с электромагнитами 34, 34.1 34.3, а также геркон 52, вэаимодей ствующий с электромагнитами 55/55, 55.3, проверит совпадение старого и задаваемого адреса соответственно считывателя б в момент прохода грузоносителем 3 при амортизационнном торможеййи через фиксирован ное положение груэоносителя 3. При этом возможны три случая. 1). Старый адрес обоих считывателей, т.е. считывателя 5 и считывателя 6 совпадает с задаваемым . 2). Ста1%1й адрес одного считыва теля, т.е считывателя 5 или вателя 6 совпадает с задаваема ад ресом. 3). Старый адрес ни одного счит вателя не совпадает с згшаваемым а ресом. В первом случае (старый адр1эс совпадает с задаваеколм адресом об считывателей) проверка совпаде11« Я коорданатного старого и задаваемог адреса происходит так. При совпаде НИИ старого адреса считывателя 5 е задаваемым адресс л, например для направления грузоносителя 3 на кра балку 2 в момент прохода грузоноси телем 3 фиксированного положения (в этом .положении ролик 62 на фиг. показан сплошной линией), геркон совмещается с включением электромагнитом 34 (фиг.2). Поэтому э-Имакается .контакт 31.1 (фиг.6), который включает промежуточное реле 77 Реле 77 контактом 77.1 становится на самоблокировку, контактом 77.2 подготавливает включение электропривода грузоносителя 3, а контактом 77.3 (фиг.7) отключает электро привод 15 (фиг.2) считывателя 5, чтобы он не включился при помощи реле 76 времени. Аналогично при совпадении адреса считывателя 6, 1 например для направления грузоносителя 3 при помощи кран-балки 2 на комплекс 11.1 станков, в момент прохода грузоносителем 3 его фикси-. рованного положения, геркон 52 совмещается с включенным электромагнитом 55.1 (фиг.2 и 3), замыкается контакт 52.1 (фиг.6), который включает промежуточное реле 78. Реле 78 контактом 78.1 становится насамоблокировку, контактом 78.2 включает электропривод грузоносителя 3 всего (при этом контакт 77.2 замкнут) , а контактом 78.3 (фиг.8) отключает электропривод 40 (фиг.1) считывателя 6. Таким образсад, при совпёщении старого и задаваемого адреса считывателя 5 и считывателя ;б непосредственно при амортизационном торможении грузоносителя 3 в момент прохода им фиксированного положения, грузоноситель 3 включается в движение влево при помощи промежуточных реле 77 и 78, Электропрнвод 15 считывателя 5 н электропривод 40 считывателя 6 для искания адреса не включаются. Эти привода удерживаются от включения при помощи реле76 времени. Во втором случае старый адрес совпадает с задаваемым адресом только одного считывателя. Например,считывателя 5 старый адрес совпадает с задаваемым адресом, а считывателя 6 не совпадает. При совпадении старого адреса считывателя 5 с задаваемым адресом в момент прохода грузоносителем 3 его фиксированного положения в зоне 8 геркон 31 совмещается с включе нием электромагнитом 34 (фиг.2 и 3), замыкается контакт 31.1 (фиг;6), который включает промежуточное реле 77. Реле 77 контактом 77.1 становится на самоблокировку, контактом 77.2 подготавливает включение электропривода грузоносителя 3 влево, а контактом 77.3 (фиг.7) отключает электропривод 15 (фиг.2) считывателя 5. При несовпадении старого адреса с задаваелалм адресом считывателя 6, например для направления грузоносителя 3 с помощью кран-балки 2 на комплекс станков 11.2, геркон 52 при амортизационной торможении груэоносителя в пункте 8 не совмещает.ся с включенным электромагнитом 55.2 и промежуточное реле 78 не включается. В таком случае при помощи ;. реле 76 времени включается электропривод 40 считывателя 6 для искания заданного адреса. С замыканием контакта 60.2 (фиг.6) реле 76 времени мгновенно замыкает свой контакт блокировки 76.1 и с определенной выдержкой времени, необходимой для
проверки совпадения старого и задаваемого адреса, замыкает контакт 76,3 (фиг.8), который включает элекропривод 40 считывателя б для перемещения геркона 52 (фиг.З) вниз, а основания 41 (фиг.1) сближаются друг с другом. .Контакт 76.2 (фиг.7 электропривода 15 считывателя 5 не включает, так как он отключен контактом 77.3. При встрече герконом 52 включенного электромагнита 55.2 замыкается контакт 52.1 (фиг.6), который включает промежуточное реле. 78. Реле 78 контактом 78.1 становится на самоблокировку, конт ктом 78.2 включает электропривод грузоносителя 3 влево . (при этом контакт 77.2 замкнут), а контактом 78.3 (фиг.8) выключает электропривод 40,(фиг.1) считывателя 6. При отсутствии включенного электромагнита 55.2 при помопи конечного выключателя 46 (фиг.) реверсируется вращение электропривода 40 и перемещение оснований 41, а также геркона 52 {фиг.2). При реверсировании электропривода 40 контакт 46.1 (фиг.8) выключает его, а контакт 46.2 включает электрогфивод 40 в обратное направление для подъема геркона 52 вверх.
При встрече герконом 52 при его подъеме вверх включенного электромагнита 55.2 залвзжается контакт 52. который включает лромежуточ1ное реле 78. Промежуточное реле 78 контактом 78.1 становится на самоблокировку, контактом 78.2 включает электропривод грузоносителя 3 влево (при этом контакт 77.2 замкнут), а контактом 78.3 (фиг.7) вьтлючает электропривод 40 (фиг.1) считывателя 6.
При отсутствии включенного электромагнита 55.2 электропривод.40 конечным выключателем 47 (фиг.1) повторно реверсируется для свлнжения оснований 41 другк другу. При ре версировании электропривода 40 контакт 47.1 выключает электропривод 40, а контакт 47.2 включает его в обратное направление. Таким образом при отсутствии включенного электромагнита 55.2 электропривод 40 в крайних положениях оснований 41 реверсируется до тех пор, пока геркон 52 не встречает включенного электромагнита считывателя 6. Это допускает некоторое опоздание задания адреса, т.е. задания адреса после остановки грузоносителя 3 в пункте 8.
Ситуация второго случая может быть обратная. Старый адрес считывателя 6 совпадает с задаваемым адресом, а считывателя 5 не совпадает .
При совпадении старого адреса считывателя б с задаваемым адресомв момент прохода грузоносителем 3 его фиксированного положения в зоне 8 геркон 52 совмещается с включением электромагнитом 55.2 (фиг.2 3), замыкается контракт 52.1 (фиг.6),
который включает промежуточное реле 78. Реле 7.8 контактом 78.1 становится на самоблокировку, контактом 78.2 подготавливает включение электропривода грузоносителя 3
влево, а контактом 78.3 (фиг.8) отключает электропривод 40 (фиг.1) считывателя 6.
При несовпадении старого адреса с задаваемым адресом считывателя 5
электропривод 15 включается для искания заданного адреса при помощи реле 76 времени. С закиканием контакта 60.2 (фиг.6) реле 76 времени мгновенно замыкает свой контакт блокировки 76.1 и с определен;iной выдержкой времени, необходимой для проверки совпадения старого и задаваемого адоеса, замыкает кон-такт 76.2 (фиг.7), который включает электропривад 15 считывателя 5 для перемехдания геркона 31 (фиг.З) вниз, а основание 19 - влево. Контакт 76.3 (фиг.8) электропривода 40 не включает, так как он отключен контактом 78.3. Ввиду того, что
геркон 31 при перемещении вниз включённого электромагнита 34.1 не встречает, то конечный выключатель 26 (фиг.2) реверсирует вращение электрОщзивода 15. При реверсировании
электропривода 15 контакт 26.1 (фиг.7) выключает его, а контакт 26.2 включает электропривод 15 в обратное направление для перемещения основания 19 вправо и подъема
геркона 31 вверх. При встрече герконом 31 при его подъеме включенного электромагнита 34.1 закыкается контакт 31.1 (фиг.6), который включает про жуточное реле П.Реле 77
контактом 77.1 становится на сгьмоблокировку,контактом 77.2 включает электропривод грузоносителя 3 влево (при этом контакт 78.2 замкнут), а контактом 77.3 (фиг.7)выключает электропривод 15 (фиг.2) считывателя 5.
При отсутствии включенного электромагнита 34.1 электропривод 15 конечным выключателем 27 (фиг.2) повторно реверсируется для перемещения основания 19 влево. При реверсировании электропривода 15 контакт 27.1 выключает электропривод 15, а контакт 27.2 включает его в обратное направление. Таким образом,
при отсутствии включеннох-о электромагнита 34.1 электропривод15 в крайних положениях основания 19 ревеосируется до тех пор, пока геркон 31 не встречает выключенный электромагнит 34.1 считывателя 5. ( в третьем случае старый адрес считывателя 5 и считывателя 6 не совпадает с задаваемым сшресом, В этом случае считыватель 5 и считыва тель 6 включаются при помощи реле 76 времени для искания заданного адреса. С замыканием контакта 60.2 реле 76 времени мгновенно за1иыкает свой контакт 76.1 блокировки и с определенной выдержкой времени, необходимой для проверки совпадений старого и задаваемого адреса, замыкает контакты 76.2 (фиг.7) и 76.3 (фиг.8) .. Контакт 76.2 включает электропривод 15 (фиг.2) считывателя 5, а контакт 76.3 - электропривод 40 считывателя 6.Электропривод и электропривод 40 после их включени при помощи реле 76 времени работают также,как во втором случае при несов падении старого и задаваемого адреса. -С завершением.передачи гщреса грузоносителю 3 он автоматически включается в движение влево при помощи замыкания контактов 77.2 и 78.2 (фиг.6). После замыкания контактов 77.2 и 78.2 промежуточное реле 73 замыкает контакты 73.1,73.3 и 73.4 и раз1Ф1кает контакт 73.2 блокировки. При замкнутом контакте 73.3 магнитный пускатель 75 вклю чает толкатель 13 (фиг.З) фиксирующего элемента 4, упоры 14 которого опускаются вниз, освобождая грузоноситель 3 и затыкая предохранитель ные контакты 81 и 82, При наличии замкнутого контакта 73.4 и разомкну того 74.4, магнитный пускатель 79 включает грузоноситёль 3 влево. Маг нитный пускатель 75 контактом 75.1 выключает реле 76 времени, а контаК том 75.2 - промежуточные 77 и 78. . С отправлением груэоносителя 3 влево каток 67 (фиг.4 и 5) механизма 9 (фиг.1) прокатывается по одностороннему адресователю 68, прикреп ленному к грузоносителю 3. При этом одноплечий подпружиненный рычаг бб освобожда.ет конечный выключатель 65 контакт 65.1 (фиг.9) кот9рого разкы кается и выключает любой включенный электромагнит 34, 34.1 - 34.3 и любую сигнальную лампу 102 - 105 считывателя 5, а также любой включенный электромагнит 55, 55.1 - 55. и любую сигнальную лампу 111-114 считываЛеля 6. С применением предлагаемого .устройства устраняется подход оператора к каждому грузоносителю, необходимое визуальное наблюдение и выжидание при ручном задании адреса, увеличивается пропускная способность подвесного TpaHchopTa, создается возможность автоматически задавать адрес из дистанционного пульта через пункт отправки проезжакяцему грузоносителю, централизованного учета транспортируемого и складируемого груза. Формула изобретения 1.Устройство для адресования грузоносителя, содержгидее адресователи грузоносителя и кран-бгшки, расположенные вдоль пути их перемещения, считыватели адреса грузоносителя и кран-бсшки с блоком управления, размещенные на грузоносителе и выполненные в виде конечных выключателей, установленных подвижно на винтах, расположенных перпендикулярно друг к другу, кинематически связанных с электроприводами их перемещения и включенных соответственно в цепь привода грузоносителя и кран-балки, причем винт считывателя кран-балки выполнен с противоположными резьбами на концах, отличающееся тем, что, с целью повышения удобства экяплуатации., блок управления считывателями содержит герконы, кинематически связанные с соответствующим электропроводом, снабженным конечными выключателями его реверса, и включенные в цепь привода грузо- , носителя, электромагниты, установленные вдоль пути перемещения груэоносителя в зоне задания адреса и взаимодействующие с соответствующими герконгкми, н -узел отключения электромагнитов, причем устройство снабжено механизмами выключения грузоносителя в зоне задания адреса я реле времени с контактами, включенными в цепи привода грузоносителя и считывателей грузоносителя и кран-балки. 2.Устройство по п. 1, отличающееся тем, что механизм выключения грузоносителя в зоне задания сщреса выполнен на установленном на х узоиосителе конечном выключателе, включенном в цепь привода грузоносителя. ИстЬчники информации, принятые во внимание при экспертизе 1 Авторское свидетельство СССР по заявке № 2582476, кл. в 65 G,47/46, 1978 (прототип).
А

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресования грузо-НОСиТЕля | 1979 |
|
SU812676A1 |
| Устройство для распределения грузов по местам назначения | 1978 |
|
SU753737A1 |
| Система для распределения грузов по местам назначения | 1982 |
|
SU1131791A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОНОСИТЕЛЕМ | 1991 |
|
RU2006435C1 |
| Устройство для управления грузоносителем | 1990 |
|
SU1787899A1 |
| Устройство для адресования подвижного объекта | 1976 |
|
SU592684A1 |
| Устройство для автоматического адресования и выгрузки изделий | 1978 |
|
SU747788A1 |
| Устройство для управления грузоносителем | 1980 |
|
SU912611A1 |
| Устройство для адресования грузов подвесного конвейера | 1984 |
|
SU1221112A1 |
| Устройство для адресования грузов подвесного конвейера | 1978 |
|
SU779202A1 |

tS3
Ф1лг
,./
9 If
/ Я..|г7..1
Ш
( J/ /// J//// /y//
/ Ч т// 1
Jff
i J- l-ff
J7
-KU« U I p j
I
7 // .f
4+
5
/ 7 /
.
-ш
T
/3/4f
--,4
it)59
//-v
-
