датчика путевых и.мпульсоз, формирование стабильного входного импульса для блока сравнения, увеличение производительности за счет выбора оптимального пути торможения, контроль и сигнализацию исправности входных цепей и устройства.
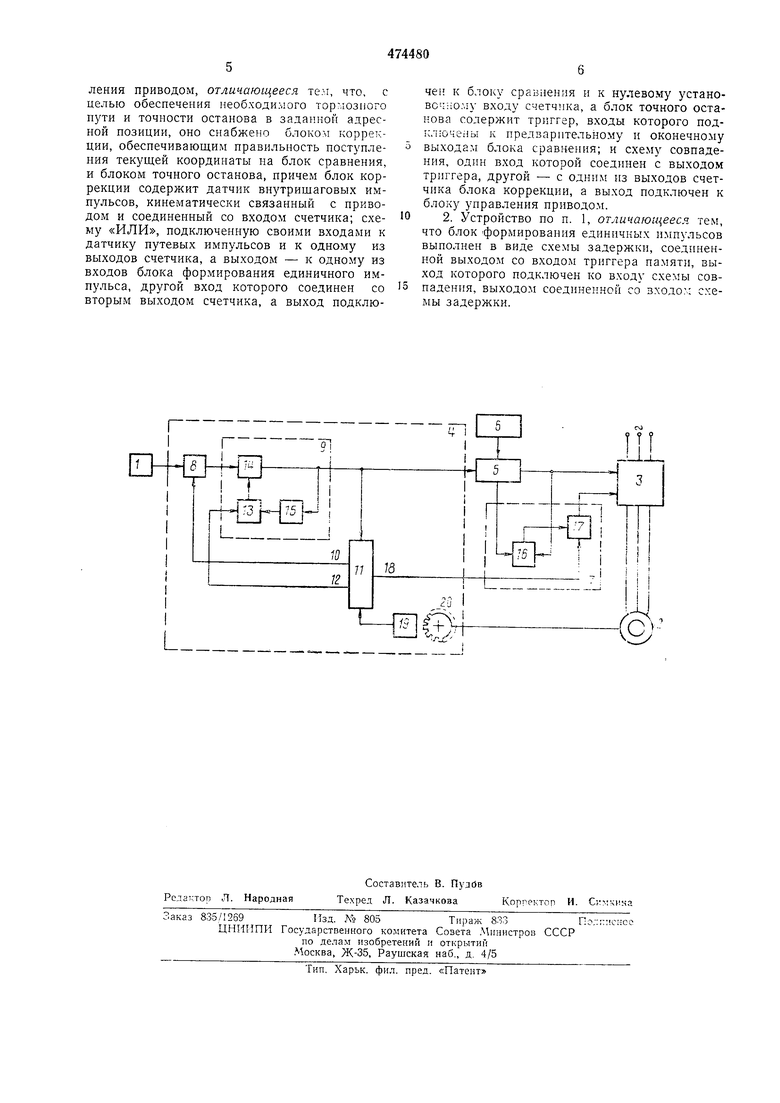
На чертеже приведена блок-схема предлагаемого устройства.
Датчик / путевых импульсов, предназначенный для взаимодействия с путевыми упо.рами при движении подвижного объекта с помощью двигателя 2 и блока 3 управления приводом, связан посредством блока 4 коррекции с блоком 5 сравнения заданной и текущей координаты. Заданное значение последней устанавливается блоком 5 задания программы. Предварительный выход блока 5 связан с блоком 7 точного останова.
Схема 8 «ИЛИ блока 4 своим выходом подключена к блоку 9 формирования единичного импульса, а входами - к датчику / путевых импульсов и к выходу 10 счетчика // вн}тришаговых импульсов. Выход 12, счетчика // связан с триггером 13 блока 9, причем выход триггера подключен на один из входов схемы 14 совпадения. Длительность входного единичного импульса для блока 5 сравнения определяется временем срабатывания триггера 13 и задержкой сигнала, осуществляемого схе.мой 15 задержки.
В качестве схемы 15 может быть применен любой элемент, время срабатывания которого выбирается таким, чтобы обеспечить надежное переключение в блоке 5 сравнения. Импульсы с выхода 10 счетчика // служат резервными и-ри случайной потере имлульса с датчика / при движении подвижного объекта.
Блок 7 точного останова содержит триггер 16, входы которого подключены к выходам блока 5 сравнения, и схему 17 совпадений, один вход которой соединен с выходом триггера 16, другой - с выходом 18 счетчика 11, и выход подключен к блоку 3 управления приводом.
Датчик 19 внутришаговых импульсов предназначен для взаимодействия с зубчатым диском 20, кинематически связанным с двигателем 2 привода.
Устройство работает следующим образом.
При прохождении очередного путевого упора датчик / выдает импульс, проходящий через схему 8 «ИЛИ и подготовленную заранее схему 14 совпадения на блок 5 сравнения, фиксирующ-ий изменение координаты подвижного объекта. Одновременно тем же импульсом устанавливается на нуль счетчик 11 и через схему 15 задержки опрокидывается триггер 13 так, что последний снимает разрещающий сигнал со схемы 14 совпадения.
При дальнейшем движении подвижного объекта датчик /Р генерирует импульсы, количество которых пропорционально пройденному расстоянию, н подает их на счетчик 11.
Пр.н :ирохождении расстояния / - Ai (где / - Jaccтoяниe между путевыми упорами; Aj - максимально возможное отклонение величины /), на выходе 12 счетчика // возникает
импульс, поступающий на вход триггера 13 и вызывающий его срабатывание.
С выхода триггера 13 поступает разрешающий сигнал на схему 14 совпадения. Возможные ложные сигналы, поступающие раиее на вход схеолы 14, к блоку Сра;внен ия 5 не проходят. Сигнал, поступающий затем от датчика / путевых импульсов, через открытую схему 14 совпадения, вызывает изменение состояния блока сравнения на единицу, одновременно через схему 15 задержки переключая триггер 13 и устанавливая счетчик // в нулевое состояние.
В случае, если в сфомсжутке Ai-f 2. где АЗ - максимально возможное отклонение величины /, сигнал от датчика / не поступит, то появляющийся и.мпульс на выходе 10 счетчика // проходит на вход блока 5 сравнения и производит при этом все вышеуказанные логические операции (нереключает триггер 13 и
устанавливает счетчик // на нуль).
В Случае, есл1и в прамэжутхе Ai+Aj перед импульсом от датчика / на схему совпадения поступит достаточно мощный сигнал помехи, он будет воспринят схемой как импульс от датчика 1, однако сбоя схемы счета в блоке 5 (например, учета двух импульсов помехи и датчика) не произойдет, так как сразу по прохождении этого сигнала схема 14 совпадения закроется до лодхода подзижного объекта к путевому Зпору.
Количество импульсов, поступивших в блок сравнения, непрерывно сравнивается с заданным с блока 6 задания программы. Необходимый путь торможения и доводки устанавливается с учетом .внутришагового делен;ия, осуществляемого датчиком 19. Сигнал на торможение поступает при совпадении чисел, заданных в блоке 6 и счетчике 11. При этом сигналом с предварительного выхода блока 5
сравнения переключается триггер 16, тем самым открывая схему 17 совпадения, через которую поступает команда с выхода 1В счетчика // к блоку 3 управления приводом.
Сигнал па окончательный останов поступает от блока 5 и одновременно этот сигнал переключает триггер 16, который закрывает схему 17 совпадения.
Импульс с выходя 10 счетчика И, появляющийся при пропуске сигнала от основного датчика /, можно использовать для запуска схемы си;гнал изациИ о .ноиспра вяости.
60Предмет изобретения
1. Устройство ;н:рогра:ММНОго управления (передвижением подвижного объекта, содержащее блок задания программы, датчик путе65 1ВЫХ ИМлульсов, -блок сравнеНКя и блок ушравления приводом, отличающееся телг, что, с целью обеспечения необходимого тормозного пути и точности останова в заданной адресной позиции, оно снабжено блоком коррекции, обеспечивающим правильность поступления текущей координаты на блок сравнения, и блоком точного останова, причем блок коррекции содержит датчик внутрищаговых импульсов, кинематически связанный с приводом и соединенный со входом счетчика; схему «ИЛИ, подключенную своими входами к датчику путевых импульсов и к одному из выходов счетчика, а выходом - к одному из входов блока формирования единичного импульса, другой вход которого соединен со вторым выходом счетчика, а выход подключен к блоку сравнения и к нулевому установочао.му входу счетчика, а блок точного останова содержит триггер, входы которого подключены к предварительному и оконечному выходам блока сравнения; и схему совпадения, один вход которой соединен с выходом триггера, другой - с одним из выходов счетчика блока коррекции, а выход подключен к блоку управления приводом.
2. Устройство по п. 1, отличающееся тем, что блок формирования единичных импульсов выполнен в виде схемы задержки, соединенной выходом со входом триггера памяти, выход которого подключен ко входу схемы совпадения, выходом соединенной со входо:: схемы задержки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления подвижным объектом | 1976 |
|
SU640926A1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1087959A1 |
| Устройство программного управления подвижным объектом | 1976 |
|
SU615011A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1969 |
|
SU475336A1 |
| Устройство для управления перемоточным станком | 1982 |
|
SU1087594A1 |
| Устройство для контроля работы подъемной машины | 1988 |
|
SU1613421A1 |
| Устройство для измерения мощности двигателей внутреннего сгорания | 1972 |
|
SU474714A1 |
| Устройство для контроля качества межслойных соединений печатной платы | 1978 |
|
SU781722A1 |
| Устройство для повагонного взвешивания транспортных объектов на ходу | 1981 |
|
SU991176A1 |
