сл
с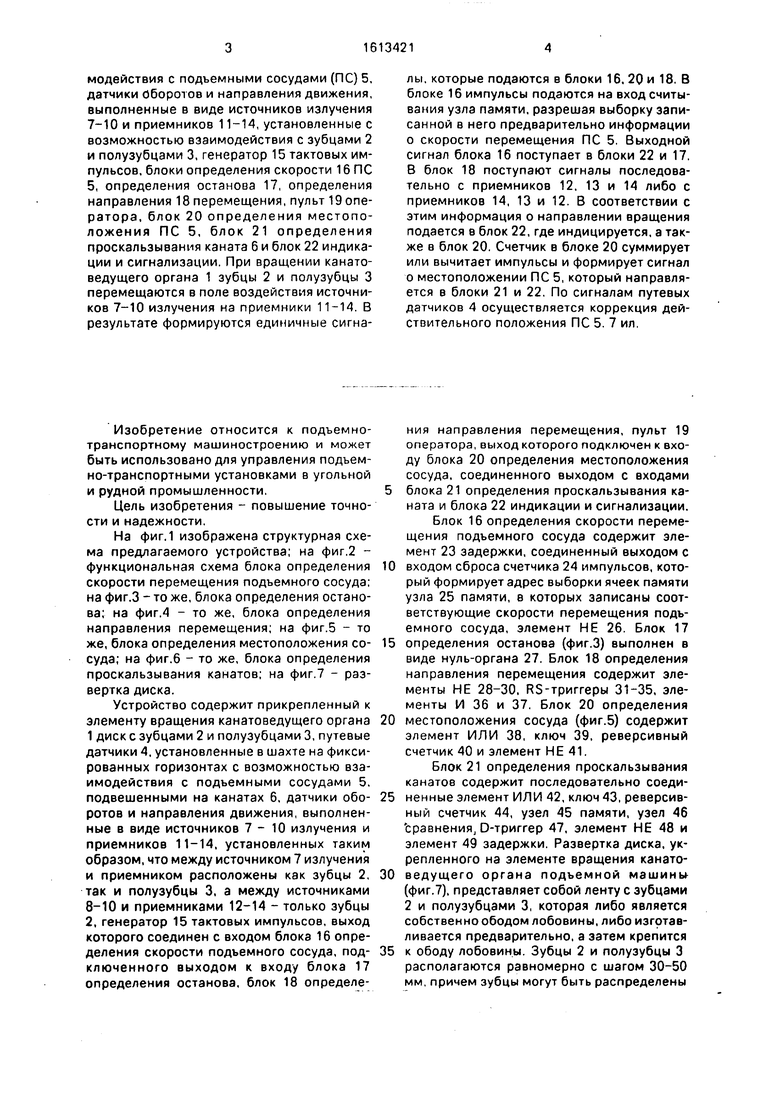
| название | год | авторы | номер документа |
|---|---|---|---|
| Канатоведущий орган подъемной машины | 1986 |
|
SU1579895A1 |
| Устройство индикации местоположения сосуда шахтной подъемной машины | 1986 |
|
SU1411258A1 |
| Устройство для исключения скольжения канатов по шкивам трения шахтной подъемной установки | 1983 |
|
SU1253928A1 |
| Устройство для программного регулирования скорости подъемной машины | 1976 |
|
SU611844A1 |
| Устройство для защиты от превышения скорости шахтной подъемной машины | 1985 |
|
SU1312043A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1990 |
|
SU1794844A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1978 |
|
SU765173A1 |
| Устройство управления проходческой подъемной установкой | 1979 |
|
SU861263A1 |
| Устройство формирования и регистрации путевых параметров для управления шахтной подъемной установкой | 1989 |
|
SU1835383A1 |
| Устройство для определения положения подъемного сосуда в стволе шахты | 1985 |
|
SU1414746A1 |
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано для управления подъемно-транспортными установками в угольной и рудной промышленности. Цель изобретения - повышение точности и надежности. Устройство содержит прикрепленный к элементу вращения канатоведущего органа 1 диск с зубцами 2 и полузубцами 3, путевые датчики 4, установленные в шахте на фиксированных горизонтах с возможностью взаимодействия с подъемными сосудами /ПС/ 5, датчики оборотов и направления движения, выполненные в виде источников излучения 7...10 и приемников 11...14, установленные с возможностью взаимодействия с зубцами 2 и полузубцами 3, генератор 15 тактовых импульсов, блоки определения скорости 16 ПС 5, определения останова 17, определения направления перемещения 18, пульт 19 оператора, блок 20 определения местоположения ПС 5, блок 21 определения проскальзывания каната 6 и блок 22 индикации и сигнализации. При вращении канатоведущего органа 1 зубцы 2 и полузубцы 3 перемещаются в поле воздействия источников излучения 7...10 на приемники 11...14. В результате формируются единичные сигналы, которые подаются в блоки 16, 20 и 18. В блоке 16 импульсы подаются на вход считывания узла памяти, разрешая выборку записанной в него предварительно информации о скорости перемещения ПС 5. Выходной сигнал блока 16 поступает в блоки 22 и 17. В блок 18 поступают сигналы последовательно с приемников 12, 13, 14 либо с приемников 14-13-12. В соответствии с этим информация о направлении вращения подается в блок 22, где индицируется, а также в блок 20. Счетчик в блоке 20 суммирует или вычитает импульсы и формирует сигнал о местоположении ПС 5, который направляется в блоки 21 и 22. По сигналам путевых датчиков 4 осуществляется коррекция действительного положения ПС 5. 7 ил.
о
CJ
ю
Фиг.1
модействия с подъемными сосудами (ПС) 5, датчики Оборотов и направления движения, выполненные в виде источников излучения 7-10 и приемников 11-14, установленные с возможностью взаимодействия с зубцами 2 и полузубцами 3, генератор 15 тактовых импульсов, блоки определения скорости 16 ПС 5, определения останова 17, определения направления 18 перемещения, пульт 19 оператора, блок 20 определения местоположения ПС 5, блок 21 определения проскальзывания каната 6 и блок 22 индикации и сигнализации. При вращении канато- ведущего органа 1 зубцы 2 и полузубцы 3 перемещаются в поле воздействия источников 7-10 излучения на приемники 11-14. В результате формируются единичные сигнаИзобретение относится к подъемно- транспортному машиностроению и может быть использовано для управления подъемно-транспортными установками в угольной и рудной промышленности.
Цель изобретения - повышение точности и надежности.
На фиг. 1 изображена структурная схема предлагаемого устройства: на фиг.2 - функциональная схема блока определения скорости перемещения подъемного сосуда; на фиг,3 - то же, блока определения останова; на фиг.4 - то же, блока определения направления перемещения; на фиг.5 - то же, блока определения местоположения сосуда; на фиг.6 - то же, блока определения проскальзывания канатов; на фиг.7 - развертка диска.
Устройство содержит прикрепленный к элементу вращения канатоведущего органа 1 диск с зубцами 2 и полузубцами 3, путевые датчики 4, установленные в шахте на фиксированных горизонтах с возможностью взаимодействия с подъемными сосудами 5, подвешенными на канатах 6, датчики оборотов и направления движения, выполненные в виде источников 7-10 излучения и приемников 11-14, установленных таким образом, что между источником 7 излучения и приемником расположены как зубцы 2, так и полузубцы 3, а между источниками 8-10 и приемниками 12-14 - только зубцы 2,генератор 15 тактовых импульсов, выход которого соединен с входом блока 16 определения скорости подъемного сосуда, подключенного выходом к входу блока 17 определения останова, блок 18 определелы, которые подаются в блоки 16, 20 и 18. В блоке 16 импульсы подаются на вход считывания узла памяти, разрешая выборку записанной в него предварительно информации о скорости перемещения ПС 5. Выходной сигнал блока 16 поступает в блоки 22 и 17. В блок 18 поступают сигналы последовательно с приемников 12, 13 и 14 либо с приемников 14, 13 и 12. В соответствии с зтим информация о направлении вращения подается в блок 22, где индицируется, а также в блок 20. Счетчик в блоке 20 суммирует или вычитает импульсы и формирует сигнал о местоположении ПС 5, который направляется в блоки 21 и 22. По сигналам путевых датчиков 4 осуществляется коррекция действительного положения ПС 5. 7 ил.
ния направления перемещения, пульт 19 оператора, выход которого подключен к входу блока 20 определения местоположения сосуда, соединенного выходом с входами
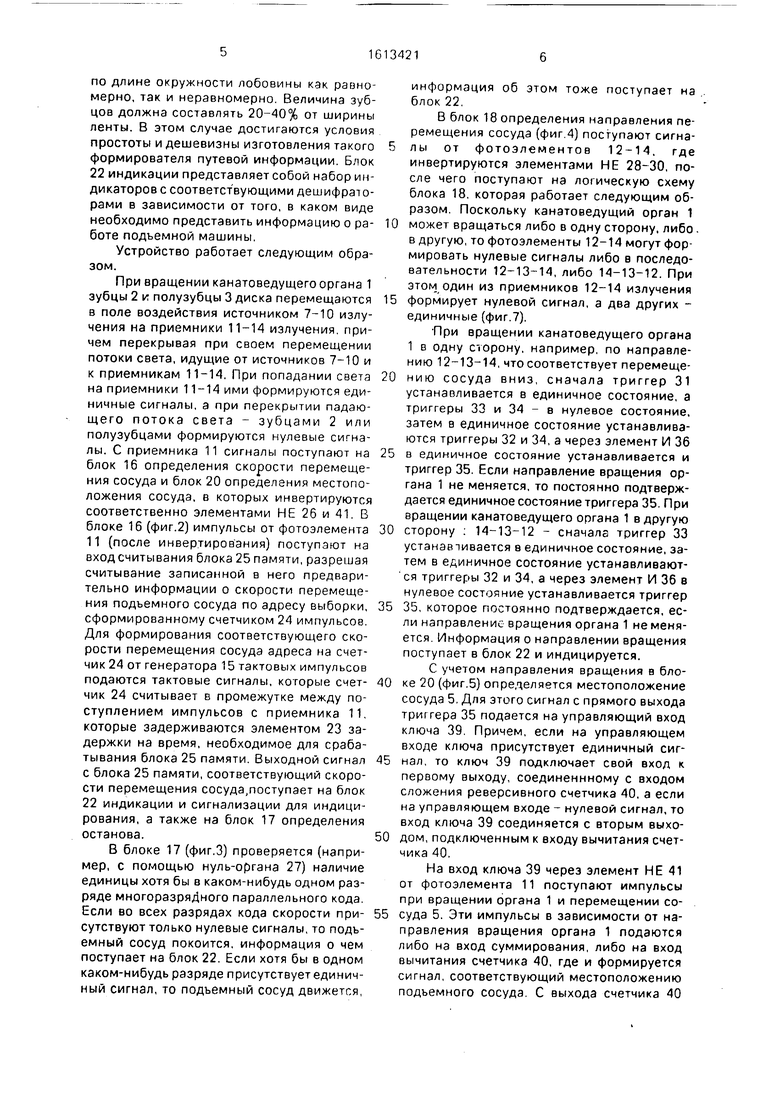
блока 21 определения проскальзывания каната и блока 22 индикации и сигнализации. Блок 16 определения скорости перемещения подъемного сосуда содержит элемент 23 задержки, соединенный выходом с
входом сброса счетчика 24 импульсов, который формирует адрес выборки ячеек памяти узла 25 памяти, в которых записаны соответствующие скорости перемещения подъемного сосуда, элемент НЕ 26. Блок 17
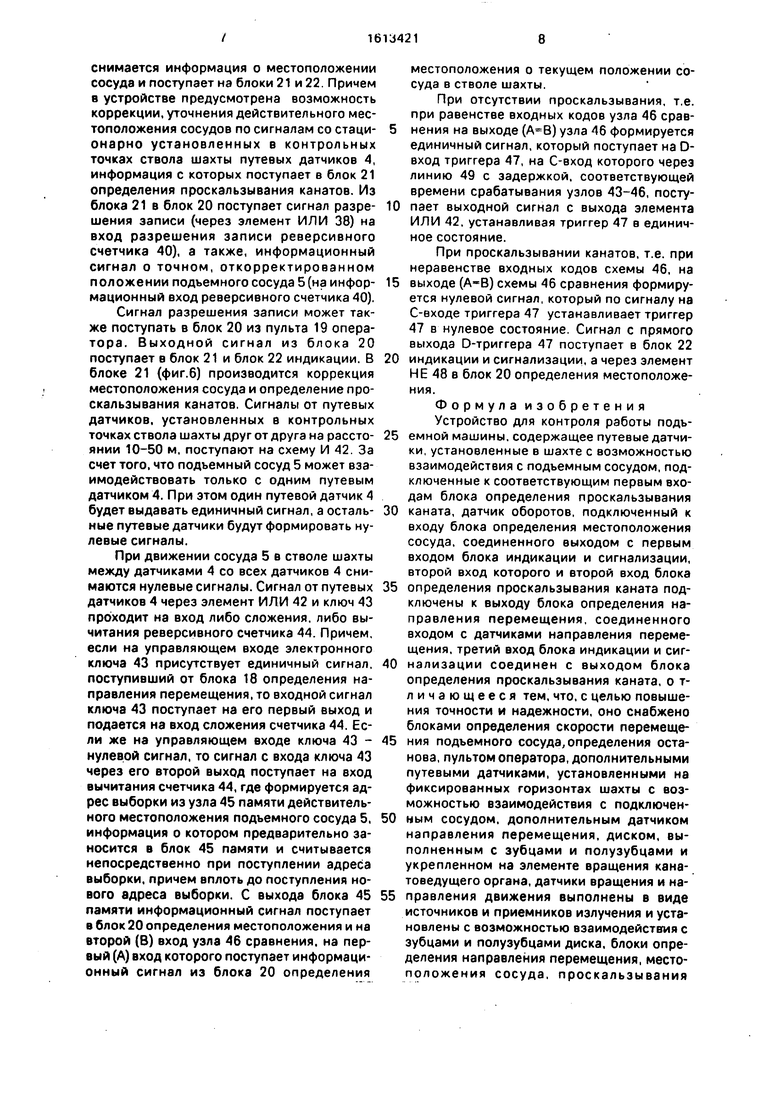
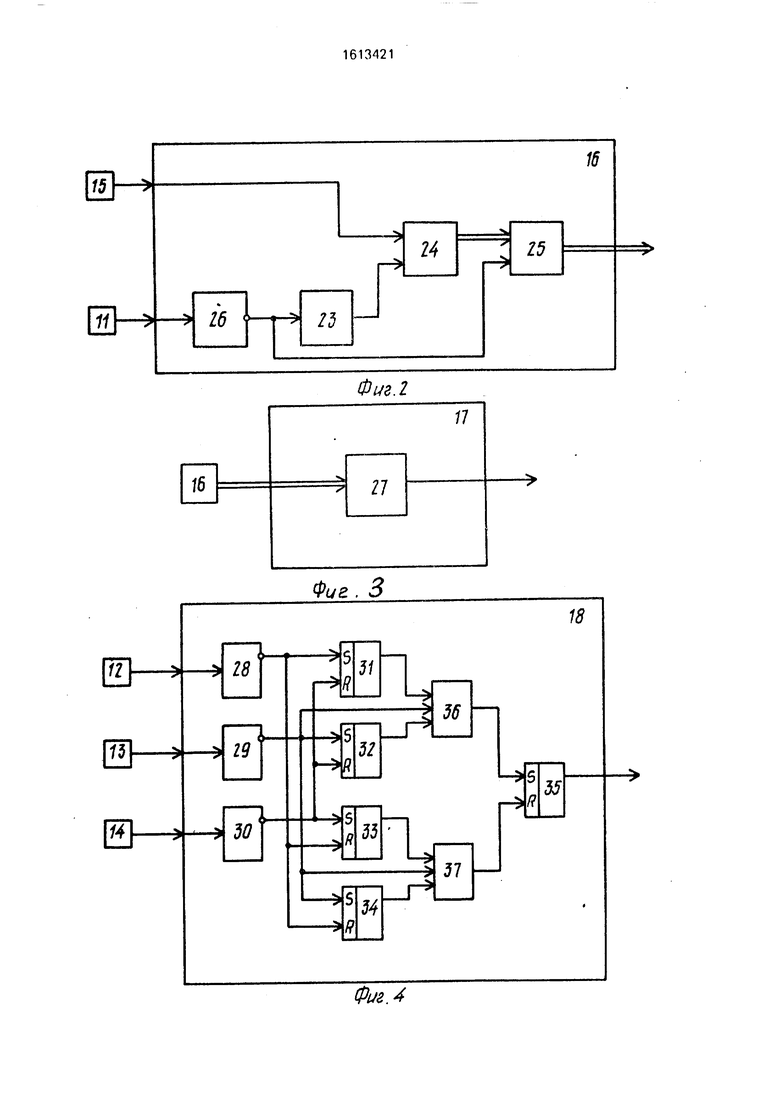
определения останова (фиг.З) выполнен в виде нуль-органа 27. Блок 18 определения направления перемещения содержит элементы НЕ 28-30, RS-триггеры 31-35, элементы И 36 и 37. Блок 20 определения
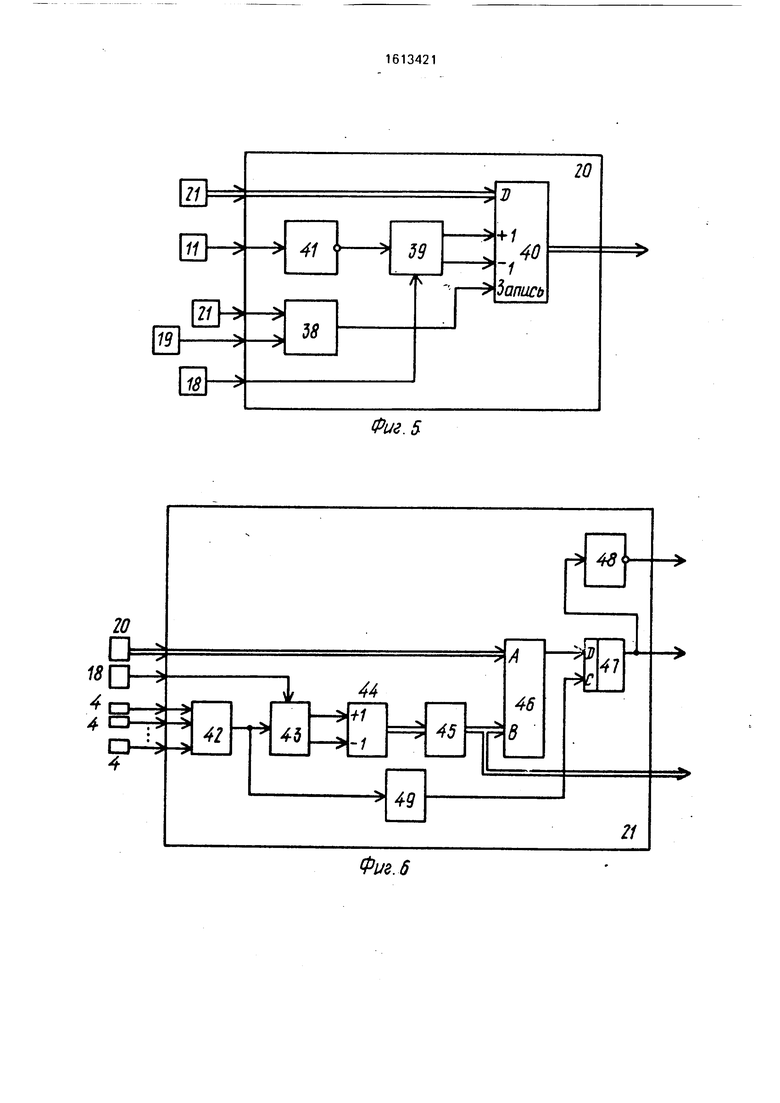
местоположения сосуда (фиг.5) со;1ержит элемент ИЛИ 38, ключ 39, реверсивный счетчик 40 и элемент НЕ 41.
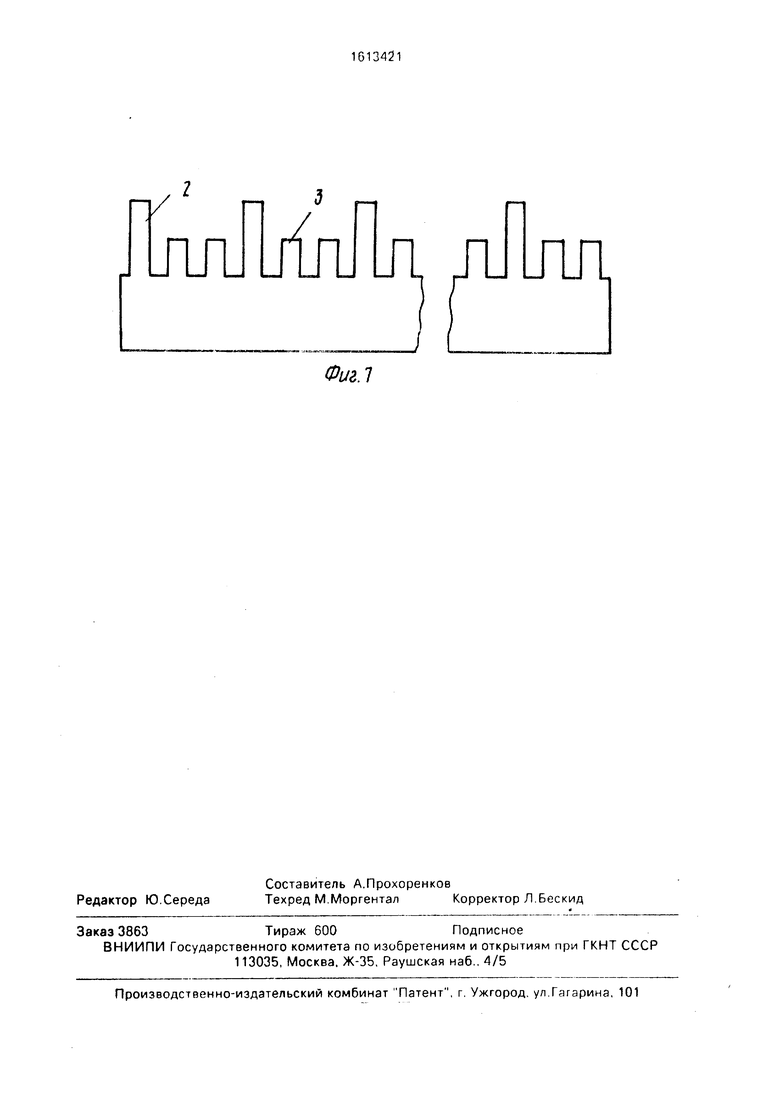
Блок 21 определения проскальзывания канатов содержит последовательно соединенные элемент ИЛИ 42, ключ 43, реверсивный счетчик 44, узел 45 памяти, узел 46 сравнения D-триггер 47, элемент НЕ 48 и элемент 49 задержки. Развертка диска, укрепленного на элементе вращения канатоведущего органа подъемной машины (фиг.7), представляет собой ленту с зубцами 2 и полузубцами 3, которая либо является собственно ободом лобовины, либоизгртав- ливается предварительно, а затем крепится
к ободу лобовины. Зубцы 2 и полузубцы 3 располагаются равномерно с шагом 30-50 мм, причем зубцы могут быть распределены
по длине окружности лобовины как равномерно, так и неравномерно. Величина зубцов должна составлять 20-40% от ширины ленты. В этом случае достигаются условия простоты и дешевизны изготовления такого формирователя путевой информации. Блок 22 индикации представляет собой набор индикаторов с соответствующими дешифраторами в зависимости от того, в каком виде необходимо представить информацию о ра- боте подъемной машины.
Устройство работает следующим образом.
При вращении канатоведущего органа 1 зубцы 2 и полузубцы 3 диска перемещаются в поле воздействия источником 7-10 излучения на приемники 11-14 излучения, причем перекрывая при своем перемещении потоки света, идущие от источников 7-10 и к приемникам 11-14. При попадании света на приемники 11-14 ими формируются единичные сигналы, а при перекрытии падающего потока света - зубцами 2 или полузубцами формируются нулевые сигналы. С приемника 11 сигналы поступают на блок 16 определения скорости перемещения сосуда и блок 20 определения местоположения сосуда, в которых инвертируются соответственно элементами НЕ 26 и 41. В блоке 16 (фиг.2) импульсы от фотоэлемента 11 (после инвертирования) поступают на вход считывания блока 25 памяти, разрешая считывание записанной в него предварительно информации о скорости перемещения подьемного сосуда по адресу выборки, сформированному счетчиком 24 импульсов. Для формирования соответствующего скорости перемещения сосуда адреса на счетчик 24 от генератора 15 тактовых импульсов подаются тактовые сигналы, которые счет- чик 24 считывает в промежутке между поступлением импульсов с приемника 11. которые задерживаются элементом 23 задержки на время, необходимое для срабатывания блока 25 памяти. Выходной сигнал с блока 25 памяти, соответствующий скорости перемещения сосуда,поступает на блок 22 индикации и сигнализации для индици- рования, а также на блок 17 определения останова.
В блоке 17 (фиг.З) проверяется (например, с помощью нуль-органа 27) наличие единицы хотя бы в каком-нибудь одном разряде многоразрядного параллельного кода. Если во всех разрядах кода скорости при- сутствуют только нулевые сигналы, то подъемный сосуд покоится, информация о чем поступает на блок 22. Если хотя бы в одном каком-нибудь разряде присутствует единичный сигнал, то подъемный сосуд движется,
информация об этом тоже поступает на блок 22.
В блок 18 определения направления перемещения сосуда (фиг.4) поступают сигналы от фотоэлементов 12-14, где инвертируются элементами НЕ 28-30, после чего поступают на логическую схему блока 18. которая работает следующим образом. Поскольку канатоведущий орган 1 может вращаться либо в одну сторону, либо в другую, то фотоэлементы 12-14 могут формировать нулевые сигналы либо в последовательности 12-13-14, либо 14-13-12. При зтом один из приемников 12-14 излучения формирует нулевой сигнал, а два других - единичные (фиг.7).
При вращении канатоведущего органа 1 в одну сторону, например, по направлению 12-13-14, что соответствует перемещению сосуда вниз, сначала триггер 31 устанавливается в единичное состояние, а триггеры 33 и 34 - в нулевое состояние, затем в единичное состояние устанавливаются триггеры 32 и 34, а через элемент И 36 в единичное состояние устанавливается и триггер 35. Если направление вращения органа 1 не меняется, то постоянно подтверждается единичное состояние триггера 35. При вращении канатоведущего органа 1 в другую сторону ; 14-13-12 - сначала триггер 33 устанавтивается в единичное состояние, затем в единичное состояние устанавливают- ся триггеры 32 и 34, а через элемент И 36 в нулевое состояние устанавливается триггер 35, которое постоянно подтверждается, если направление вращения органа 1 не меняется. Информация о направлении вращения поступает в блок 22 и индицируется.
С учетом направления вращения в блоке 20 (фиг.5) определяется местоположение сосуда 5. Для этого сигнал с прямого выхода триггера 35 подается на управляющий вход ключа 39. Причем, если на управляющем входе ключа присутствует единичный сигнал, то ключ 39 подключает свой вход к первому выходу, соединеннному с входом сложения реверсивного счетчика 40, а если на управляющем входе - нулевой сигнал, то вход ключа 39 соединяется с вторым выходом, подключенным к входу вычитания счетчика 40.
На вход ключа 39 через элемент НЕ 41 от фотоэлемента 11 поступают импульсы при вращении органа 1 и перемещении сосуда 5. Эти импульсы в зависимости от направления вращения органа 1 подаются либо на вход суммирования, либо на вход вычитания счетчика 40, где и формируется сигнал, соответствующий местоположению подъемного сосуда. С выхода счетчика 40
снимается информация о местоположении сосуда и поступает на блоки 21 и 22. Причем в устройстве предусмотрена возможность коррекции, уточнения действительного местоположения сосудов по сигналам со стационарно установленных в контрольных точках ствола шахты путевых датчиков 4, информация с которых поступает в блок 21 определения проскальзывания канатов. Из блока 21 в блок 20 поступает сигнал разрешения записи (через элемент ИЛИ 38) на вход разрешения записи реверсивного счетчика 40), а также, информационный сигнал о точном, откорректированном положении подъемного сосуда 5 (на информационный вход реверсивного счетчика 40).
Сигнал разрешения записи может также поступать в блок 20 из пульта 19 оператора. Выходной сигнал из блока 20 поступает в блок 21 и блок 22 индикации. В блоке 21 (фиг.6) производится коррекция местоположения сосуда и определение проскальзывания канатов. Сигналы от путевых датчиков, установленных в контрольных точках ствола шахты друг от друга на расстоянии 10-50 м, поступают на схему И 42. За счет того, что подъемный сосуд 5 может взаимодействовать только с одним путевым датчиком 4. При этом один путевой датчик 4 будет выдавать единичный сигнал, а остальные путевые датчики будут формировать нулевые сигналы.
При движении сосуда 5 в стволе шахты между датчиками 4 со всех датчиков 4 снимаются нулевые сигналы. Сигнал от путевых датчиков 4 через элемент ИЛИ 42 и ключ 43 проходит на вход либо сложения, либо вычитания реверсивного счетчика 44. Причем. если на управляющем входе электронного ключа 43 присутствует единичный сигнал. поступивший от блока 18 определения направления перемещения, то входной сигнал ключа 43 поступает на его первый выход и подается на вход сложения счетчика 44. Если же на управляющем входе ключа 43 - нулевой сигнал, то сигнал с входа ключа 43 через его второй выход поступает на вход вычитания счетчика 44, где формируется адрес выборки из узла 45 памяти действительного местоположения подъемного сосуда 5, информация о котором предварительно заносится в блок 45 памяти и считывается непосредственно при поступлении адреса выборки, причем вплоть до поступления нового адреса выборки. С выхода блока 45 памяти информационный сигнал поступает в блок 20 определения местоположения и на второй (В) вход узла 46 сравнения, на первый (А) вход которого поступает информационный сигнал из блока 20 определения
местоположения о текущем положении сосуда в стволе шахты.
При отсутствии проскальзывания, т.е. при равенстве входных кодов узла 46 срав- 5 нения на выходе () узла 46 формируется единичный сигнал, который поступает на D- вход триггера 47, на С-вход которого через линию 49 с задержкой, соответствующей времени срабатывания узлов 43-46, посту0 пает выходной сигнал с выхода элемента ИЛИ 42. устанавливая триггер 47 в единичное состояние.
При проскальзывании канатов, т.е. при неравенстве входных кодов схемы 46, на
5 выходе (А-В) схемы 46 сравнения формируется нулевой сигнал, который по сигналу на С-входе триггера 47 устанавливает триггер 47 в нулевое состояние. Сигнал с прямого выхода D-триггера 47 поступает в блок 22
0 индикации и сигнализации, а через элемент НЕ 48 в блок 20 определения местоположения.
Формула изобретения Устройство для контроля работы подъ5 емной машины, содержащее путевые датчики, установленные в шахте с возможностью взаимодействия с подъемным сосудом, подключенные к соответствующим первым входам блока определения проскальзывания
0 каната, датчик оборотов, подключенный к входу блока определения местоположения сосуда, соединенного выходом с первым входом блока индикации и сигнализации, второй вход которого и второй вход блока
5 определения проскальзывания каната подключены к выходу блока определения направления перемещения, соединенного входом с датчиками направления перемещения, третий вход блока индикации и сиг0 нализации соединен с выходом блока определения проскальзывания каната, о т- личающееся тем, что, с целью повышения точности и надежности, оно снабжено блоками определения скорости перемеще5 ния подъемного сосуда, определения останова, пультом оператора, дополнительными путевыми датчиками, установленными на фиксированных горизонтах шахты с возможностью взаимодействия с подключен0 ным сосудом, дополнительным датчиком направления перемещения, диском, выполненным с зубцами и полузубцами и укрепленном на элементе вращения кана- товедущего органа, датчики вращения и на5 правления движения выполнены в виде источников и приемников излучения и установлены с возможностью взаимодействуя с зубцами и полузубцами диска, блоки определения направления перемещения, местоположения сосуда, проскальзывания
каната, индикации и сигнализации снабжены дополнительными входами и выходами причем блок определения скорости перемещения подъемного сосуда первым входом соединен с датчиком оборотов, вторым - с выходом генератора тактовых импульсов, а выходом - с первым дополнительным входом блока индикации и сигнализации и входом блока определения останова, подключенного выходом к второму допол- нительному входу блока индикации и сигнализации, блок определения направления перемещения допрлнительным входом подключен к дополнительному датчику направления перемещения, а выходом - к первому дополнительному входу блока определения местоположения сосуда, второй дополнительный вход которого соединен с выходом пульта управления, третий и четвертый - соответственно с первым и вторым допол- нительным выходами блока определения проскальзывания каната, первые дополнительные входы которого подключены к дополнительным путевым датчикам, а второй к выходу блока определения местоположе- ния сосуда, при этом блок определения скорости перемещения подъемного сосуда содержит элементы НЕ, задержки, счетчик импульсов и узел памяти, один из входов которого соединен с выходом счетчика им- пульсов, подключенно1 о одним из входов к выходу элемента задержки, другой вход узла памяти и вход элемента задержки соеди- нены с выходом элемента НЕ, вход элемента НЕ и другой вход счетчика импуль- сов являются первым и вторым входами блока, а выход узла памяти - выходом блока, блок определения направления перемещения содержит элементы НЕ, И и RS-тригге- ры, входы первого RS-триггера соединены с выходами элементов И, одни из входов которых и S-входы вторых RS-триггеров подключены к выходу первого элемента НЕ, другие входы элементов И соединены с выходами третьих и вторых RS-триггеров, S- вход третьего RS-триггера первой группы и
R-входы второго и третьего триггеров второй группы подключены к выходу второго элемента НЕ, S-вход второго RS-триггера второй группы и R-входы второго и третьего RS-триггеров второй группы соединены с выходом третьего элемента НЕ, входы второго и третьего элемента НЕ являются входами блока, вход первого элемента НЕ - дополнительным входом, а выход первого RS-триггера - выходом блока, блок опреде-- ления местоположения сосуда содержит элементы ИЛИ, НЕ, ключ и реверсивный счетчик, входы сложения и вычитания кото- рога,соединены с выходами ключа, один из входов KdTOporo подключен к выходу элемента НЕ, вход записи реверсивного счетчики подключен к выходу элемента ИЛИ, вход элемента НЕ является входом блока, другой вход ключа, один из входов элемента ИЛИ, D-вход реверсивного счетчика и другой вход элемента ИЛИ являются соответственно первым, вторым, третьим и четвертым дополнительными входами блока, выход реверсивного счетчика является выходом блока, блок определения проскальзывания каната содержит элементы ИЛИ, НЕ, задержки, ключ, D-триггер, реверсивный счетчик, узлы памяти и сравнения, выход последнего соединен с D-входом D-триггера. подклю ченного С-входом к выходу элемента задержки, а выходом - к входу элемента НЕ, первый вход узла сравнения соединен с выходом узла памяти, подключенного входом к выходу реверсивного счетчика, входы которого соединены с выходами ключа, один из входов которого и вход элемента задержки соединены с выходом элемента ИЛИ, один из входов которого и другой вход ключа являются первыми и вторым входами блока, другие входы элемента ИЛИ и другой вход узла сравнения являются первым и вторым дополнительными входами блока, выход элемента НЕ является выходом блока, а выходы узла памяти и D-триггера - первым и вторым дополнительными выходами блока.
Фиа . 3
УЗ
29
30
Фиг.2
27
5
37
Фиг.4
Фиг.5Фиг. 6
nrULf{nj
Фи.1
| Устройство для управления многобарабанной, подъемно-транспортной установкой | 1977 |
|
SU899426A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
