мозного тока, обеспечивающего удерживание винтов от проворачивания. Сигнал датчика входа металла в клеть заправляет агрегатом, питающим двигатель винтом таким образом, что агрегат подает в якорную цеиь двигателя импульсы тормозного тока в те периоды времени, когда возмол но самоотвинчивакие внитов, причем величина и длительность этих импульсов задаются узлом формирования. Тормозпой момент, возникающий от этого тока, должен быть достаточным для удержания винтов от проворачивания, но меньшим момеита трогания винтов вниз. Длительноегь импульса должна быть равной или большей интервала времени, в течеиие которого возможно самоотвиичивапие.
Современный электропривод нажимных винтов обл импых станов (блюминг, слябинг) как правило, выполняется двухдвигательиым (но одному двигателю на каждый винт), но с целью упрощения приводимые ниже чертежи и описания выполнены применительно к однодвигательному приводу, так как в данном случае это не вносит принципиальных отличий.
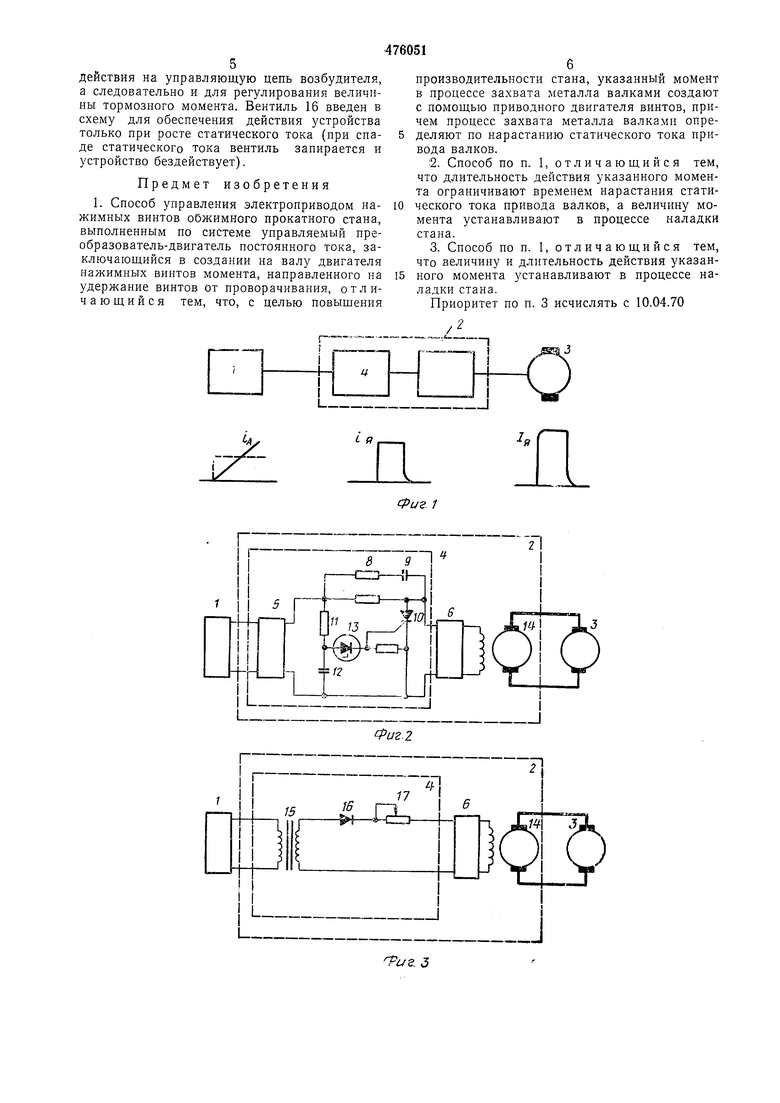
На фиг. I представлена блок-схема устройства, реализующего предложенный способ; на фиг. 2 и 3 - варианты устройства, реализующего этот способ.
Выход датчика входа металла в клеть 1 подключен к входу агрегата 2, питающего якорную цепь приводного двигателя 3. В состав агрегата 2 введен узел формирования 4; - выходной сигнал датчика: - напряжение, подаваемое на якорь приводного двигателя, от агрегата питания; - ток якоря двигателя.
Датчик входа металла в клеть I выполнен, например, как датчик давления металла на валки (месдозы этого датчика устанавливаются между верхним валком и нал имными винтами, что позволяет контролировать именно те усилия, которые приводят к отходу нажимных винтов), как датчик статического тока приводного двигателя прокатных валков (так как статическая нагрузка появляется при обжатии металла валками, а при этом возникает и давление на винты), как фотодатчик, контролирующий вход металла в валки и работающий совместно с узлом, вносящим информацию о зазоре между валками и высоте слитка и др.
Узел формирования (фиг. 2) 4 выполнен как -усилитель 5, к входной цепи которого подключен выход датчика давления металла на винты 1, а выход усилителя подключен к входу управления возбудителя 6, причем, в выходную цепь усилителя введены элементы, формирующие величину и длительность сигнала управления. Сопротивление 7 включено в выходную цепь усилителя и служащая для формирования переднего фронта сигнала управления возбудителем. Тиристор 10 включен нараллельно нагрузке усилителя (входу управления возбудителя) и служит для ограничения длительности сигнала. Интегрируюпдая
цепь, состоящая из сопротивления II и емкости 12 подключена к выходу усилителя 5 и служит для управления тиристором 10. Управляющий электрод тиристора подключен к этой цепи через динистор 13. Возможио и иное построение узла формирования, эквивалентного описанному по своему действию, например, с использованием схемы токоограничепия агрегата.
При возникновении усилий, которые могут привести к отходу верхнего валка, с датчика давления на винты 1 подается сигнал на вход усилителя 5. Усилитель 5 имеет больщой коэффициент усиления и его выходное напряжение достигает максимальной величины уже при малом входном сигнале, т. е. уже при малом давлении на винты. При этом подается управляющий сигнал на вход возбудителя 6, причем величина установивщегося значения
этого сигнала ограничивается сопротивлением 7, а крутой передний фронт формируется форсирующей цепью 8, 9. Длительность сигнала ограничивается тиристором 10, который при включении снижает напряжение на входе
возбудителя 6 до величины около 1 в (прямое падение напряжения на тиристоре). Длительность сигнала управления, определяется параметрами динистора 13 и интегрирующей цепи II, 12, которая начинает отсчет времени
при появлении напряжения на выходе усилителя 5 н отпирает тиристор 10, когда напряжение на емкости 12 достигает величины нанряжения отпирания динистора 13. Сформированный по величине к длительности сигнал
отрабатывается генератором 14, питающим якорную цепь приводного двигателя нажимных винтов в виде импульса тормозного тока определенной величины и длительности, который препятствует проворачиванию нажимных
винтов под действием динамических усилий, возникающих в процесса захвата металла валками (входа металла в клеть).
Узел формирования может быть выполнен и иначе так, что длительность имнульса тормозного тока будет не заранее заданной, а определится длительностью процесса захвата металла валками. Схема такого узла для случая, когда в качестве датчика входа металла в клеть используется датчик статической
нагрузки двигателя прокатных валков, приведена на фиг. 3.
Ток статической нагрузки двигателя прокатных валков контролируется датчиком 1, выход которого подключен к дифференцирующему
трансформатору 15, вторичная обмотка которого через вентиль 16 и сопротивление 17 подключена к входу управления возбудителя 6.
Датчик статического тока 1 контролирует ток статической нагрузки двигателя прокатных валков, возникающий- при входе металла в клеть и нарастающий в процессе захвата. Выходное напряжение датчика дифференцируется трансформатором 15 и создает ток в цепи унравления возбудителя 6. Сопротивление
17 служит для регулирования величины воз
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом нажимных винтов обжимного прокатного стана | 1978 |
|
SU732044A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| Система автоматического управления поштучным редуцированием с натяжением на многоклетевом стане с индивидуальным электроприводом | 1985 |
|
SU1297959A1 |
| Электропривод рабочего рольганга | 1983 |
|
SU1129709A1 |
| Устройство для регулирования скорости двигателя | 1981 |
|
SU970331A2 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Бесконтактное устройство для индикации наличия металла в клети прокатного стана | 1977 |
|
SU738705A1 |
| Устройство фиксации наличия металла в валках прокатной клети | 1976 |
|
SU644571A1 |
| Электропривод клети прокатного стана | 1981 |
|
SU970615A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
