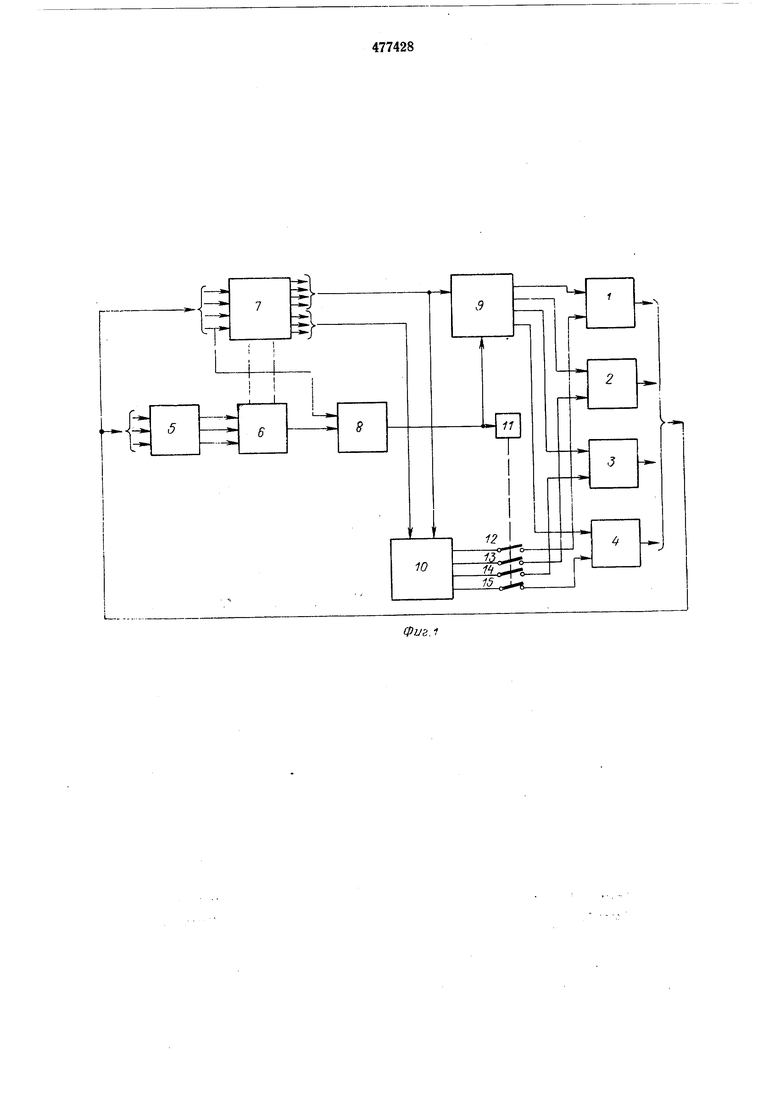
схеме блока частных производных 7, вычисляющего значения частных производных вспомогательной и оптимизируемой функций, блок вспомогательной функции 8 для вычисления значений вспомогательной функции, основной блок управления 9, формирующий нормальные управляющие напряжения для интеграторов 1-4, блок тангенциального управления 10 для формирования тангенциальных управляющих напряжений и реле управления 11 с нормально замкнутыми контактами 12-15 для подачи тангенциальных управляющих напряжений на входы интеграторов 1-4.
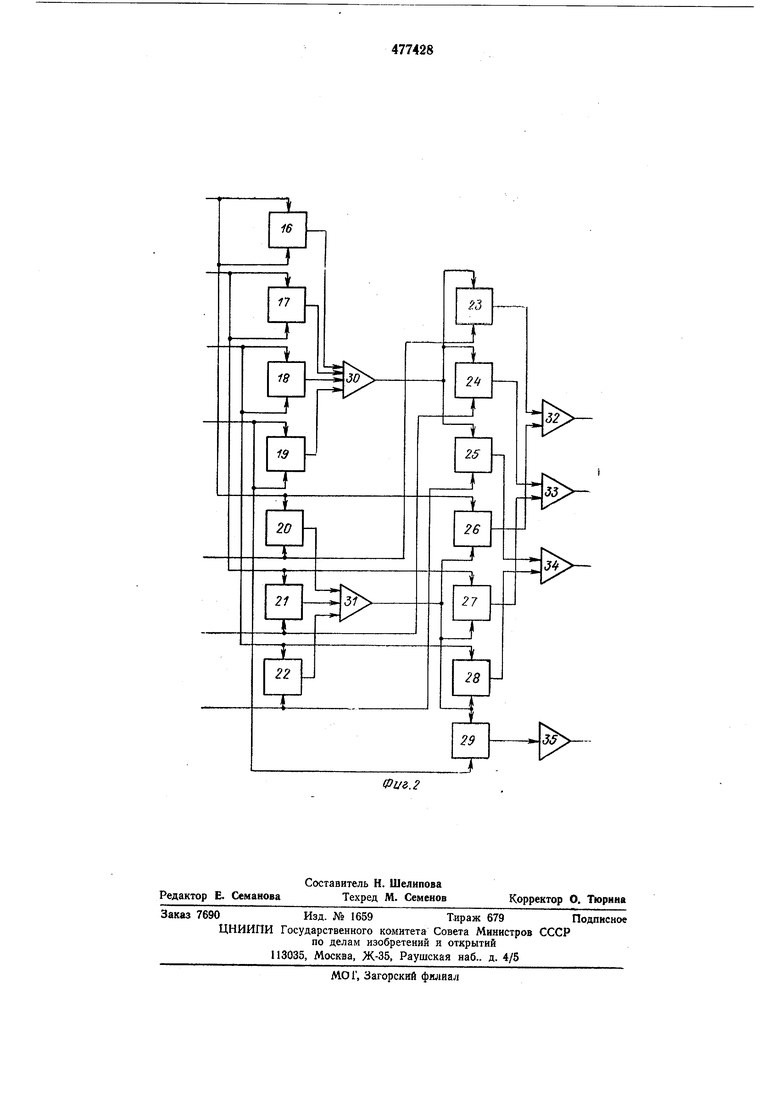
Блок тангенциального управления (см. фиг. 2) содержит блоки умножения 16-29 и суммирующие усилители 30-25.
Выходы интеграторов 1-3 (см. фиг. 1) подключены ко входам блока ограничений 5 и блока частных производных 7, выход интегратора 4 вспомогательной переменной подключен ко входам блока частных производных 7 и блока вспомогательной функции 8.
Выходы блока ограничений 5 соединены со входами блока логики 6, выходы которого соединены со входами блока вспомогательной функции 8. Переключающие контакты релейных элементов блока логики 6 включены в схему блока частных производных 7, выходы которого соединены со входами основного блока управления 9 и блока тангенциального управления 10.
Выход блока вспомогательной функции 8 соединен со входом основного блока управления 9 и реле управления 11. Выходы основного блока управления подключены ко входам соответствующих интеграторов 1-4. Выходы блока тангенциального упра вления 10 через нормально замкнутые контакты 12-15 реле управления 11 подключены ко входам соответствующих интеграторов 1-4.
В блоке тангенциального управления (см. фиг. 2) входы блоков умножения 16-18 соединены со входами блоков умножения, соответственно 20-22 и 26-28.
Выходы блоков умножения 20-22 соединены со входами блоков умножения, соответственно, 23-25. Входы блока умножения 19 соединены со входом блока умножения 29. Выходы блоков умножения 16-19 подключены ко входу суммирующего усилителя 30, выход которого соединен со входами блоков умножения 23-25.
Выходы блоков умножения 23-25 подключены ко входам суммирующих усилителей, соответственно, 32-34. Выходы блоков умножения 20-22 подключены ко входу суммирующего усилителя 31, выход которого соединен со входами блоков умножения 26-29. Выходы блоков умножения подключены ко входам суммирующих усилителей, соответственно, 32-34. Выход блока умножения 29 соединен со входом усилителя 35.
В качестве элементов описанного устройства используют, например, операционные
усилители, электромагнитные реле и функциональные преобразователи, выполненные, палример, на диодах и резисторах.
Устройство (см. фиг. 1) предназначено для определения значений переменных Хь Xz,.:, „ , нри которых оптимизируемая функция
(X,, Х2,...,Х„)
(1)
достигает наименьщего значения в допустимой области, определяемой системой линейных ограничений
gj(xi, л;2,..., л:„)0, / I, 2,..., т.
(2)
Функция у должна быть выпукла и иметь непрерывные частные производные первого порядка. Функции gy {xi, Х2,...,х ) должны 20 определять выпуклую область.
Все неравенства (2) сводят к одному неравенству с помощью логической операции обобщенной конъю(кции
G (х) ,...,(3)
Эта логическая функция обладает той особенностью, что в любых значениях переменных Xi ее значение равно наименьщему 30 из значений сравниваемых функций.
Неравенство (3) сводится к равенству путем введения вспомогательной переменной z.
Ф (лгь Х2,...,х , z) G (xi, Х2,...,х„) - -JKZ O(4)
Равенство (4) описывает гиперповерхность Ф b (rt+1)-мерном пространстве переменных Xi, дга, ..., л:„ ,z, все точки которой удовлетворяют неравенству (3). Искомая экстремальная точка, удовлетворяющая ограничениям (2), обязательно должна находиться на гиперповерхности Ф.
В устройстве искомые значения переменных фиксируют на выходах интеграторов, количество которых равно количеству всех переменных. Управляющие напряжения, подаваемые на входы интеграторов, приняты в виде
50оп.
и. . афф. ,(S Ф2+Ф2)-Ф,2ФгУ;,
и, , -f фФ,Б Ф,-(/,-,
i . 1
где a const 0 - f 1 при j3 const 010 при ,
6Ф. Ф бФ
. Ф,-
Уг
б.; 6z бх/
Управляющие напряжения Uи и.
обеспечивают такое изменение переменных
.гь As,..., А„ , z, при котором изображающая точка из любого начального положения выходит на гиперповерхность Ф и двил.ется по ней в направлении проекции антиградиента оптимизируемой функции у «а эту поверхность.
Из выражения (4) следует, что
60
Ф,бдг;
Т. е. частные производные вспомогательной функции Ф (х, Х2у...,Хп , 2) ПО переменньш Х, x.z,...,Kn равны частным производным той функции ограничений gj (х, Хч, ...,х„ ), значение которой наименьшее в данной точке пространства переменных Xi, лга, ...,л:„ .
Выражения (5) и (6) можно представить в следующем виде
t/. ;. u:+v и:, /, Z /;,
где Ul -аФФ;, f/.-аФФ. - управляющие напряжения, вырабатываемые основным блоком управления 9,
+Ф1 )-Ф,
.|ф;у
управляющие напряжения, вырабатываемые блоком тангенциального управления 10.
Устройство имеет переменную структуру.
Первая структура работает в том случае, когда значения переменных на выходах интеграторов не удовлетворяют условию Ф; 0. При этом v 0, и устройство приводит переменные к соотношению (4).
Вторая структура работает в том случае, когда значения переменных удовлетворяют условию . При этом , и устройство изменяет переменные так, что значения функций Ф (xi, Х2,.., х„,г) и / (лгь Х2,..., х„ ) уменьшаются. Когда переменные достигают значений, соответствующих условию (4), дальнейшее их изменение происходит в направлении уменьшения оптимизируемой функции у при поддержании между ними соотношения (4).
Пусть, например, начальные значения переменных на выходах интеграторов 1-4 (фиг. 1) таковы, что значение первой функции ограничений (xi, Х2,..,х„ отрицательно, а остальных двух положительны. Напряжения с выходов интеграторов 1-3 подают на входы блока ограничений 5 и блока частных производных 7. На выходе блока ограничений 5 напряжение, равное значению первой функции ограничений, отрицательно, а два остальных напряжения положительны. С выхода блока ограничений 5 напряжения
подают на входы блока логики 6. На выходе блока логики получают напряжение, равное значению первой функции ограничений, так как в рассматриваемом случае это напряжение является наименьшим (алгебраически).
Релейные элементы блока логики 6 переключают свои контакты в схеме блока частных производных 7, в результате чего на выходе этого блока получают значения частных производных вспомогательной функции, равные значения частных производных той функции ограничений, значение которой выбрано блоком логики 6 - в рассматриваемом случае - первой функции ограничений.
На выходе блока частных производных 7 получают также значения частных производных оптимизируемой функции. С выходов блока частных производных напряжения, равные значениям частных производных вспомогательной функции, подают на входы основного блока управления 9 и блока тангенциального управления 10. На вход блока тангенциального улравления подают также с выходов блока частных производных 7 напряжения, равные значениям частных производных оптимизируемой функции. С выхода блока логики 6 напряжение подают на вход блока вспомогательной функции 8. На вход этого же блока подают значение вспомогательной переменной z с выхода интегратора 4 вспомогательной переменной 4. На выходе блока вспомогательной функции 8 получают напряжение, равное значению вспомогательной функции Ф (xi,X2,..,x,, , z) с обратным
знаком.
С выхода блока вспомогательной функции 8 напряжение подают на вход основного блока управления 9 и реле управления 11. Так как в рассматриваемом случае значение
вспомогательной функции отрицательно, то на реле управления 11 с выхода блока вспомогательной функции 8 подают положительное напряжение, в результате чего реле управления размыкает контакты 12-15. С выходов основного блока управления 9 на входы соответствующих интеграторов 1-4 подают управляющие напряжения, которые обеспечивают такое изменение переменных на выходах интеграторов 1-4, при которо.м наиряжение на выходе блока ограничений 5, ранное значению первой функции ограничений, уменьшается (по абсолютной величине).
Когда напряжение па выходе блока лоriHKif 6 достигает нуля, реле управления 11
замыкает контакты 12-15 и подключает выходы блока тангенциального управления 10 ко входам интеграторов 1-4. С выходов блока тангенциального управления 10 на входы соответствующих интеграторов 1-4 подают управляющие напряжения, обеспечивающие такое изменение переменных на выходах интеграторов 1 - 4, при котоPOIM значение оптимизируемой функции умвньшаетч;я при сохранении «йизменного значения вспомогательной фун1кции.
Изменение переменных прекращается, когда оптимизируемая функция достигает экстремального значения. Бели точка экстремума находится на пересечении ограничений, то переменные колеблются вблизи этой точки.
Блок тангенциального управления 10 работает следующим образом.
Напряжения, равные значениям частных производных вспомогательной функции, подают на входы блоков умножения 16-19, 20-22 и 26-29.
Напряжения, равные значениям частных производных оптимизируемой функции, подают на входы блоков умножения 20-22 и 23-25. С блоков ум.ножения 16-19 напряжения, равные квадратам значений -соответствующих частных производных, подают на вход суммирующего усилителя 30, выходное напряжение которого поступает на входы всех блоков умножения 23-25.
Выходные напряжения блоков умножения 20-22 подают на вход суммирующего усилителя 31, с выхода которого напряжение подают на входы всех блоков умножения . Выходные напряжения блоков умножения 23-25 и 26-28 попарно подают на входы суммирующих усилителей 32-34, на выходах которых получают тангенциальные управляющие напряжения для интеграторов 1-3 основных переменных (см. фиг. 1).
Выходное напряжение блока умножения 29 подают на вход усилителя 35, на выходе которого получают тангенциальное управляющее напряжение для интегратора 4 вспомогательной переменной 4 (см. фиг. 1).
Предмет изобретения
1. Устройство для решения задач нелинейного программирования, содержащее интеграторы, первые и вторые входы которых подключены соответственно к выходам основного блока управления и к контактам реле управления, а выходы соединены € соответствующими входами блока частных произ1водных и блока ограничений, подсоединенного
через блок логики и блок вспомогательной функции ко входу основного блока управления и к обмотке реле управления, отличающееся тем, что, с целью упрощения устройства, оно содержит блок тангенциального управления, первая и вторая группы входов которого подключены соответственно к первой и второй группам выходов блока частных производных, вторая группа выходов блока частных производных соединена также с соответствующими входами основного блока управления, а выходы блока тангенциального управления подсоединены к контактам реле управления.
2. Устройство по п. 1, отличающееся тем,
что в нем блок тангенциального управления содержит суммирующие усилители и четыре группы блоков умножения, входы каждого из блоков умножения первой группы соединены между собой и со входами соответствующих блоков умножения второй и четвертой групп, один из входов . каждого блока умножения второй группы соединен со входом соответствующего блока умножения третьей группы, выходы блоков умножения
первой группы соединены со входами суммирующего усилителя, выход которого подключен ко входам всех блоков умножения третьей группы, выходы блоков умножения второй группы подключены ко входам суммирующего усилителя, выход которого соединен со входом всех блоков умножения четвертой группы, а выходы всех блоков умножения третьей группы и блоков умножения четвертой группы попарно подключены ко входам
суммирующих усилителей, выходы которых соединены с выходами блока.